技术特征:
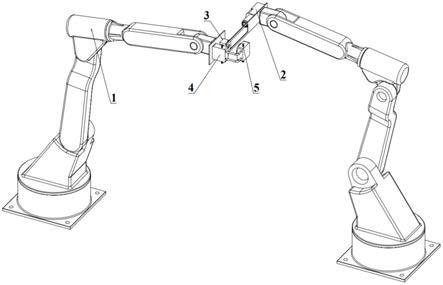
1.一种基于psd的工业机器人重复性和协同性测量装置,其特征在于:两个工业机器人(1)相对安装,两个工业机器人(1)的末端之间安装有测量组件,测量组件包含测量单元和发射单元两部分,发射单元包含激光发射器(2)和分光镜(3),测量单元由第一双轴psd传感器(4)、第二双轴psd传感器(5)和一个安装座组成,第一双轴psd传感器(4)和第二双轴psd传感器(5)通过安装座相互垂直固定布置安装,激光发射器(2)发射激光经分光镜(3)发生反射和透射后,分别入射到第一双轴psd传感器(4)和第二双轴psd传感器(5)上。2.根据权利要求1所述的一种基于psd的工业机器人重复性和协同性测量装置,其特征在于:所述的激光发射器(2)通过一个固定支架固定安装在一个工业机器人(1)的末端,第一双轴psd传感器(4)和第二双轴psd传感器(5)连接后共同通过另一个固定支架固定安装在另一个工业机器人(1)的末端。3.根据权利要求1所述的一种基于psd的工业机器人重复性和协同性测量装置,其特征在于:第一双轴psd传感器(4)和第二双轴psd传感器(5)均各有两个测量轴,第一双轴psd传感器(4)的两个测量轴相互垂直,第二双轴psd传感器(5)的两个测量轴相互垂直,第一双轴psd传感器(4)和第二双轴psd传感器(5)各自其中一个测量轴相互平行作为第一轴,第一双轴psd传感器(4)和第二双轴psd传感器(5)各自其中另一个测量轴相互垂直,第一双轴psd传感器(4)的另一个测量轴和第二双轴psd传感器(5)的另一个测量轴分别为第二轴和第三轴,第一轴、第二轴和第三轴均相互垂直正交,构成了三维正交坐标系。
技术总结
本实用新型公开了一种基于PSD的工业机器人重复性和协同性测量装置。两个工业机器人相对安装,两个工业机器人的末端之间安装有测量组件,测量组件包含了测量单元和发射单元两部分,发射单元包含了激光发射器和分光镜,测量单元主要由两个双轴PSD传感器和一个安装座组成,两个双轴PSD传感器通过安装座相互垂直固定布置安装,激光发射器反射激光经分光镜发生反射和透射后,分别入射到两个双轴PSD传感器上。本实用新型的装置在不改变PSD位置传感器测量精度的情况下,可用于解决现有PSD位置传感器只能对一维和二维位置坐标进行测定的局限性,可以测定三维空间的位置坐标,拓展了PSD位置传感器的使用场景和测量对象。位置传感器的使用场景和测量对象。位置传感器的使用场景和测量对象。
技术研发人员:沈斌 项俊 金挺 王廷
受保护的技术使用者:杭州徕之测量技术有限公司
技术研发日:2021.01.12
技术公布日:2021/11/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。