一种基于uwb的可自动跟随的仓储用分拣机器人
技术领域
1.本实用新型涉及智能仓储设备技术领域,具体涉及一种基于uwb的可自动跟随的仓储用分拣机器人。
背景技术:
2.物流仓储设备主要包括货架、堆高车、搬运车、出入境输送设备、分拣设备、提升机、搬运机器人以及计算机管理和监控系统。这些设备可以组成自动化、半自动化、机械化的商业仓库,来堆放、存取和分拣承运物品。物流仓储设备可以分为两个大类:物流设备和仓储设备。
3.随着人们生活水平的提高、生活节奏的加快,越来越多的人通过网购的方式进行日常用品的购买,而网购的盛行亦带动了快递行业的高速发展,然而,快递员每天需要分发成千上万的快递,若货物不能及时有效的进行分拣,会影响货物投递的效率,从而造成货物的滞留;随着人工成本的不断升高,用机器人代替人力去做一些重复性的高强度劳动是现代机器人研究的一个重要方向。
4.当前自动化仓储物流正越来越普及,以亚马逊为首的电商正大规模采用自动化仓储物流系统进行分拣货物,对于仓储物流系统的货架仍然是以人工上料以及取料为主。
5.因此,为解决上述问题,开发一种便于使用且分拣准确快速的基于uwb的可自动跟随的仓储用分拣机器人很有必要
技术实现要素:
6.鉴于此,本实用新型提供一种基于uwb的可自动跟随的仓储用分拣机器人,解决了对储物流分拣的取料基本还是通过人工搬运的问题,准确快速的自动分拣商品,并自动人随工作人员行走。
7.为了达到上述目的,本实用新型是通过以下技术方案实现的:
8.本实用新型提供一种基于uwb的可自动跟随的仓储用分拣机器人,包括底盘、第一置物台、第二置物台、uwb标签和三个uwb基站,所述底盘两侧壁中部分别开设有第二轮槽,所述第二轮槽中分别设置有主动轮,所述底盘底面的四角开设有四个第一轮槽,四个所述第一轮槽中分别安装有万向轮,所述第一置物台固定设置在所述底盘上方,所述第二置物台固定设置在所述第一置物台上方一定距离处,所述第二置物台的外围上三角型分布设置有三个所述uwb基站,所述uwb标签为工作人员佩戴。
9.在上述的基于uwb的可自动跟随的仓储用分拣机器人中,作为优选方案,三个所述uwb基站分别为第一uwb基站、第二uwb基站和第三uwb基站,所述第一uwb基站和所述第二uwb基站分别设置在所述第二置物台前侧面的两侧,所述第三uwb基站设置在所述第二置物台后侧面的中部。
10.在上述的基于uwb的可自动跟随的仓储用分拣机器人中,作为优选方案,所述主动轮外沿不超过所述底盘侧壁,所述主动轮上沿不高出所述底盘上表面,所述主动轮下沿与
所述万向轮下沿平齐。
11.在上述的基于uwb的可自动跟随的仓储用分拣机器人中,作为优选方案,底盘内部设置有控制器、蓄电池、第一步进电机和第二步进电机,所述第一步进电机和所述第二步进电机的输出端分别与两个所述主动轮联动,所述第一步进电机和所述第二步进电机的控制端均与所述控制器电性连接,所述控制器、所述第一步进电机和所述第二步进电机均通过蓄电池供电。
12.在上述的基于uwb的可自动跟随的仓储用分拣机器人中,作为优选方案,所述第一步进电机和所述第二步进电机分别配套设置有步进电机驱动器,所述步进电机驱动器与所述控制器电性连接。
13.在上述的基于uwb的可自动跟随的仓储用分拣机器人中,作为优选方案,所述第二置物台通过前支座和后支座安装在所述第一置物台上方,所述前支座固定设置在所述第一置物台上表面的前部中点处,所述后支座固定设置在所述第一置物台上表面的后部中点处。
14.在上述的基于uwb的可自动跟随的仓储用分拣机器人中,作为优选方案,所述第一置物台的侧壁设置有电源开关,所述前支座的前端设置有ic卡感应器、扫描仪和应急开关,所述前支座的顶部设置有显示屏,所述ic卡感应器、所述扫描仪和所述显示屏均与所述控制器电性连接,所述应急开关和所述电源开关均设置在所述蓄电池的出线端,所述蓄电池为所述ic卡感应器、所述扫描仪和所述显示屏供电。
15.在上述的基于uwb的可自动跟随的仓储用分拣机器人中,作为优选方案,所述第二置物台的侧壁设置有指示灯,所述指示灯与所述控制器电性连接。
16.在上述的基于uwb的可自动跟随的仓储用分拣机器人中,作为优选方案,所述底盘上表面固定设置有多个支柱,所述支柱与所述第一置物台下表面固定连接。
17.在上述的基于uwb的可自动跟随的仓储用分拣机器人中,作为优选方案,所述第一置物台与所述第二置物台上分别设置有料框。
18.本实用新型提供一种基于uwb的可自动跟随的仓储用分拣机器人,具有如下有益效果:
19.本实用新型提供一种基于uwb的可自动跟随的仓储用分拣机器人,解决了对储物流分拣的取料基本还是通过人工搬运的问题,设置有两个步进电机和两个主动轮,控制两个主动轮的转向即可控制机器人的行进方向,同时设置有扫描仪,可快速识别商品的条码,同时将商品信息显示在显示器上,可以准确快速的自动分拣商品;三个uwb基站呈三角形分布,分别检测三个uwb基站与uwb标签之间的距离,从而控制器计算出车体与工作人员的距离,控制第一步进电机和第二步进电机的转动,实现自动跟随。
附图说明
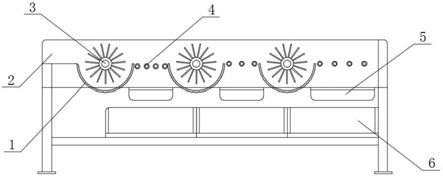
20.图1为本实用新型实施例所提供的基于uwb的可自动跟随的仓储用分拣机器人的总体结构示意图;
21.图2为本实用新型实施例所提供的基于uwb的可自动跟随的仓储用分拣机器人另一方向的总体结构示意图;
22.图3为本实用新型实施例所提供的基于uwb的可自动跟随的仓储用分拣机器人的
正视结构示意图;
23.图4为本实用新型实施例所提供的基于uwb的可自动跟随的仓储用分拣机器人底盘的总体结构示意图;
24.图5为本实用新型实施例所提供的基于uwb的可自动跟随的仓储用分拣机器人底盘的俯视结构示意图;
25.图6为本实用新型实施例所提供的基于uwb的可自动跟随的仓储用分拣机器人底盘的控制原理连接示意图。
26.附图标记说明:
[0027]1‑
底盘,2
‑
第一置物台,3
‑
第二置物台,4
‑
主动轮,5
‑
电源开关,6
‑
前支座,7
‑
后支座,8
‑
料框,9
‑
应急开关,10
‑
ic卡感应器,11
‑
显示屏,12
‑
扫描仪,13
‑
指示灯,14
‑
支柱,15
‑
第一轮槽,16
‑
万向轮,17
‑
第二轮槽,18
‑
第一uwb基站,19
‑
第二uwb基站,20
‑
第三uwb基站。
具体实施方式
[0028]
为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
[0029]
以下结合具体情况说明本实用新型的示例性实施例:
[0030]
请参考图1、图4、图5和图6,图1为本实用新型实施例所提供的基于uwb的可自动跟随的仓储用分拣机器人的总体结构示意图,图4为本实用新型实施例所提供的基于uwb的可自动跟随的仓储用分拣机器人底盘1的总体结构示意图,图5为本实用新型实施例所提供的基于uwb的可自动跟随的仓储用分拣机器人底盘的俯视结构示意图,图6为本实用新型实施例所提供的基于uwb的可自动跟随的仓储用分拣机器人底盘的控制原理连接示意图;本实用新型提供一种基于uwb的可自动跟随的仓储用分拣机器人,包括底盘1、第一置物台2、第二置物台3、uwb标签和三个uwb基站,底盘1两侧壁中部分别开设有第二轮槽17,第二轮槽17中分别设置有主动轮4,底盘1底面的四角开设有四个第一轮槽15,四个第一轮槽15中分别安装有万向轮16,第一置物台2固定设置在底盘1上方,第二置物台3固定设置在第一置物台2上方一定距离处,第二置物台的外围上三角型分布设置有三个uwb基站,uwb标签为工作人员佩戴。
[0031]
在上述的基于uwb的可自动跟随的仓储用分拣机器人中,作为优选方案,三个所述uwb基站分别为第一uwb基站18、第二uwb基站19和第三uwb基站20,所述第一uwb基站18和第二uwb基站19分别设置在第二置物台3前侧面的两侧,第三uwb基站20设置在第二置物台3后侧面的中部。三个uwb基站呈三角形分布,分别检测三个uwb基站与uwb标签之间的距离,从而控制器计算出车体与工作人员的距离,控制第一步进电机和第二步进电机的转动,实现自动跟随。
[0032]
在上述的基于uwb的可自动跟随的仓储用分拣机器人中,作为优选方案,主动轮4外沿不超过底盘1侧壁,主动轮4上沿不高出底盘1上表面,主动轮4下沿与万向轮16下沿平齐。
[0033]
在上述的基于uwb的可自动跟随的仓储用分拣机器人中,作为优选方案,底盘1内部设置有控制器、蓄电池、第一步进电机和第二步进电机,第一步进电机和第二步进电机的输出端分别与两个主动轮4联动,第一步进电机和第二步进电机的控制端均与控制器电性连接,控制器、第一步进电机和第二步进电机均通过蓄电池供电。
[0034]
在上述的基于uwb的可自动跟随的仓储用分拣机器人中,作为优选方案,第一步进电机和第二步进电机分别配套设置有步进电机驱动器,步进电机驱动器与控制器电性连接。
[0035]
在上述的基于uwb的可自动跟随的仓储用分拣机器人中,作为优选方案,第二置物台3通过前支座6和后支座7安装在第一置物台2上方,前支座6固定设置在第一置物台2上表面的前部中点处,后支座7固定设置在第一置物台2上表面的后部中点处。
[0036]
请参考图2和图3,图2为本实用新型实施例所提供的基于uwb的可自动跟随的仓储用分拣机器人另一方向的总体结构示意图,图3为本实用新型实施例所提供的基于uwb的可自动跟随的仓储用分拣机器人的正视结构示意图;在上述的基于uwb的可自动跟随的仓储用分拣机器人中,作为优选方案,第一置物台2的侧壁设置有电源开关5,前支座6的前端设置有ic卡感应器10、扫描仪12和应急开关9,前支座6的顶部设置有显示屏11,ic卡感应器10、扫描仪12和显示屏11均与控制器电性连接,应急开关9和电源开关5均设置在蓄电池的出线端,蓄电池为ic卡感应器10、扫描仪12和显示屏11供电。
[0037]
控制器分别与第一uwb基站18、第二uwb基站19和第三uwb基站20电性连接。
[0038]
在上述的基于uwb的可自动跟随的仓储用分拣机器人中,作为优选方案,第二置物台3的侧壁设置有指示灯13,指示灯13与控制器电性连接。
[0039]
在上述的基于uwb的可自动跟随的仓储用分拣机器人中,作为优选方案,底盘1上表面固定设置有多个支柱14,支柱14与第一置物台2下表面固定连接。
[0040]
在上述的基于uwb的可自动跟随的仓储用分拣机器人中,作为优选方案,第一置物台2与第二置物台3上分别设置有料框8。
[0041]
本实用新型的具体实施方式提供了一种基于uwb的可自动跟随的仓储用分拣机器人,解决了对储物流分拣的取料基本还是通过人工搬运的问题,设置有两个步进电机和两个主动轮4,控制两个主动轮4的转向即可控制机器人的行进方向,同时设置有扫描仪12,可快速识别商品的条码,同时将商品信息显示在显示器上,可以准确快速的自动分拣商品。
[0042]
最后,还需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括要素的过程、方法、物品或者设备中还存在另外的相同要素。
[0043]
以上对本实用新型所提供的具体实施方式进行了详细介绍,本文中应用了具体个例对本实用新型的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本实用新型的方法及其核心思想;同时,对于本领域的一般技术人员,依据本实用新型的思想,在具体实施方式及应用范围上均会有改变之处,综上,本说明书内容不应理解为对本实用
新型的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。