1.本实用新型涉及无人机技术领域,具体涉及一种智能消杀无人机喷洒系统。
背景技术:
2.无人机是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,是无人驾驶飞行器的统称。随着无人机技术的发展与推广,无人机已被广泛应用于航拍、农业、林业、测绘等领域。无人机也可以用于室外大面积区域喷洒消毒作业,极大提高作业效率,避免人员接触,提高消毒人员的安全性。目前执行消杀任务通常使用的是大型农业植保无人机,具有载重量大、飞行时间长的优点,但植保无人机操作和维护比较复杂,机动性和灵活性存在不足,无法适用于楼宇等障碍物较多的场景中,同时喷洒过程中由于无人机的发生位置的倾斜导致无法正确的检测到储药箱中的液体的具体高度,存在误判,从而存在难以保证消杀的质量和有效性的缺点。
技术实现要素:
3.1.所要解决的技术问题:
4.针对上述技术问题,本实用新型提供一种智能消杀无人机喷洒系统,来克服上述的技术问题。
5.2.技术方案:
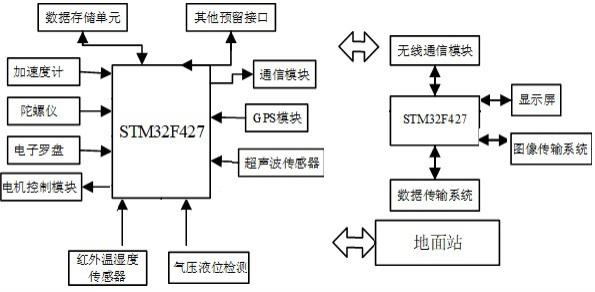
6.一种智能消杀无人机喷洒系统,包括无人机本体及设置于无人机上的自主喷洒装置,其特征在于:所述无人机本体的底部设置红外温湿度传感器;所述无人机本体还包括单片机、加速度计、陀螺仪、通信模块、gps模块以及超声波传感器;所述自主喷洒装置包括储药箱;所述储药箱内部设置气压液位检测装置;所述气压液位检测装置的气压传感器安装于储药箱的开口处检测开口处的容器内部气压并将检测的气压值发送至单片机;所述单片机将接收到的气压值与陀螺仪采集的数据根据预先存储的气压纠正表进行比较得到纠正后的气压值,并根据纠正后的气压值读出此时该气压值对应的液体的高度;所述无人机本体通过通信模块实现与地面站通讯相连;所述预先存储的气压纠正表为通过模拟预设不同的倾斜角度对应的气压值与水平状态下的气压值之间的差值。
7.进一步地,所述自主喷洒装置还包括控制喷洒电机工作的电机驱动电路以及电机控制电路;所述电机驱动电路以及电机控制电路均与单片机相连。
8.进一步地,所述单片机的型号为stm32f427 。
9.进一步地,所述地面站包括单片机、无线通信模块以及图像传输装置。
10.进一步地,所述气压液位检测装置包括壳体、气压传感器、基座以及弹性防水胶;所述壳体与基座形成空腔,气压传感器通过固定于基座表面安装于空腔中;所述空腔中通过弹性防水胶实现密封,防水胶的外表面为凸形,凸形的两端比外壳略低,凸形的凸起部位比外壳略低。
11.3.有益效果:
12.(1)本实用新型针对无人机飞行过程中,受到药箱倾斜干扰后对液面的判断存在误差的现象,在储药箱中安装气压液位检测装置,通过纠正气压差值测量值存在的误差得到纠正后的误差,并采用对照法得到真实的液面高度实现精确判断喷洒量。其中对气压差值测量值纠正,采用陀螺仪角度进行校正,消除植保无人机飞行中机身倾斜带来的药箱倾斜干扰误差。
13.(2)本实用新型通过搭载了红外及温湿度等传感器模块,能够对作业环境进行实时监测及数据采集实现识别被喷洒对象;通过超声波传感器识别飞行器的海拔高度;基于arduino单片机、控制电机驱动模块实现喷洒控制系统的控制,选择无线接收发送模块实现喷洒模块与飞控系统的数据通信。
14.(3)本实用新型中借助单片机操作环境,利用串口通讯技术,建立无人机飞行控制器输出参量与喷洒控制系统主控器之间的串口通信。通过主控器单片机软件程序;对喷洒控制系统单元进行实时控制。
15.(4)本实用新型的无人机能够实时监测地面目标与飞行高度,喷洒装置控制喷洒流量,智能自主完成精确喷洒任务。
附图说明
16.图1为本实用新型的控制框图;
17.图2为本实用新型中具体实施例的储药箱中的气压液位检测装置的结构图;
18.图3为本实用新型中具体实施例的储药箱中结构图;
19.图4为本实用新型中具体实施例的实现流程图。
具体实施方式
20.下面结合附图对本实用新型进行具体的说明。
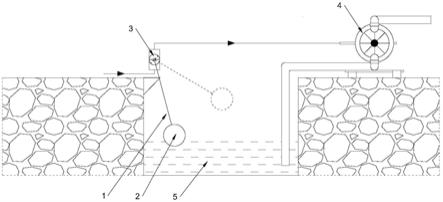
21.如附图1所示一种智能消杀无人机喷洒系统,包括无人机本体及设置于无人机上的自主喷洒装置,其特征在于:所述无人机本体的底部设置红外温湿度传感器;所述无人机本体还包括单片机、加速度计、陀螺仪、通信模块、gps模块以及超声波传感器;所述自主喷洒装置包括储药箱;所述储药箱内部设置气压液位检测装置;所述气压液位检测装置的气压传感器安装于储药箱的开口处检测开口处的容器内部气压并将检测的气压值发送至单片机;所述单片机将接收到的气压值与陀螺仪采集的数据根据预先存储的气压纠正表进行比较得到纠正后的气压值,并根据纠正后的气压值读出此时该气压值对应的液体的高度;所述无人机本体通过通信模块实现与地面站通讯相连;所述预先存储的气压纠正表为通过模拟预设不同的倾斜角度对应的气压值与水平状态下的气压值之间的差值。
22.无人机进行喷洒时,液体在垂直方向上的高度会随着箱体的倾斜角度不同而变化,比如左倾10度,左侧液位高度就会升高,右侧液位高度降低,液位高度发生改变,就会引起压缩气体效果的变化,压强也就改变,这就是倾斜造成液位高度测量误差的原因。本装置中的气压液位检测装置用于根据气压变化转化为液位高度变化。气压到液位转换的基本原理为:将气压计置于容积可变的密闭容器中,再将容器放在箱底,通过将不同液面高度下箱底液体的压强转化为密闭容器中气体的压强,再由气压计读数。将气压传感器置于开口容器中,再由弹性密封膜对开口进行密封,通过不同液位高度时,液体底部液压对弹性密封膜
的作用不同,压缩容器内气体效果不同,容器内气体压强随液位变化而变化,从而得出液位变化情况。本装置中设置陀螺仪采集模块采集倾斜角度,并将倾斜角度与检测的气压值进行比对,通过预先传输至单片机中的对应关系可以直接读出此时储药箱中液体的为多少,并将对应的液体的体积传输入至单片机。预设前通过实验分析法,模拟出10
°
、15
°
、20
°
、30
°
等至少4种不同角度倾斜药箱,记录气压液位传感器的气压值与水平状态下的传感器测量误差值。通过陀螺仪得到无人机实时的姿态角度信息,从而补偿对应倾斜角度的误差值,从而实现校正液位误差的效果。
23.进一步地,所述自主喷洒装置还包括控制喷洒电机工作的电机驱动电路以及电机控制电路;所述电机驱动电路以及电机控制电路均与单片机相连。
24.进一步地,所述单片机的型号为stm32f427 。
25.进一步地,所述地面站包括单片机、无线通信模块以及图像传输装置。
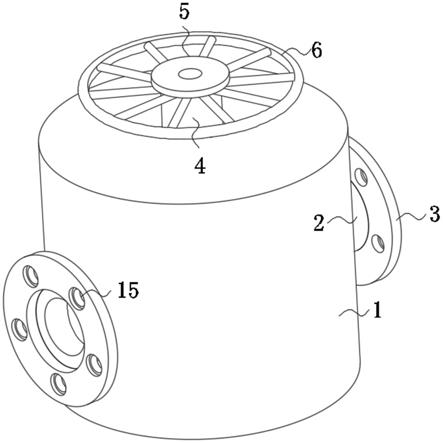
26.进一步地,如附图2、3所示,所述气压液位检测装置5包括壳体1、气压传感器2、基座3以及弹性防水胶4;所述壳体与基座形成空腔,气压传感器通过固定于基座表面安装于空腔中;所述空腔中通过弹性防水胶实现密封,防水胶的外表面为凸形,凸形的两端比外壳略低,凸形的凸起部位比外壳略低。
27.本装置中采用的气压液位检测装置安装于储药箱的底部,用于测量容器中气体的压强,并将测量的气压值发送至单片机。图中的6为储液箱的出口处。其中防水胶的表面为凸形,通过弹性密封膜将其受到的压强传输至气压传感器。
28.具体实施例:
29.如附图4所示,执行任务前对储药箱内液体的液位信息进行采集,并根据采集的信息对药液进行补充。通过地面控制终端规划飞行喷洒任务,预先设定航点、飞行速度、喷洒速度等工作参数,并将工作参数传输至飞行器;飞行器检测喷药开关、喷药控制阀的开口度等系统状态是否正常。当喷药开关、控制阀开口度符合正常要求,飞行器起飞,并且以预设的频率采集无人机的飞行状态,包括飞行的速度、高度;根据气压液位检测装置检查的气压数据,计算药箱内的液位高度并计算航点间的实际喷洒流量,与作业任务期望的喷洒流量进行对比,如果检测到喷洒的作业速度与预设值不同,调整喷药控制阀的开口度,实现无人机智能自主喷洒。
30.虽然本实用新型已以较佳实施例公开如上,但它们并不是用来限定本实用新型的,任何熟习此技艺者,在不脱离本实用新型之精神和范围内,自当可作各种变化或润饰,因此本实用新型的保护范围应当以本技术的权利要求保护范围所界定的为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。