1.本发明涉及角度测量技术领域,具体为一种回型山体道路设计角度检测装置及其使用方法。
背景技术:
2.目前,盘山公路是指盘绕山体修筑建造的公路,属于山路的一种类型。盘山公路主要在山岭重丘地带中建设,在平原微丘崎岖区域中也有铺设,盘山公路是山路的一种常见类型,其主要特点是盘绕山体、依靠山坡修建,坡陡弯急、起伏不平。盘山公路通过线路盘旋环绕大山的方式减少道路坡度、使车辆能够爬坡,在盘山公路建造后需要检测道路的弯角,防止弯角存在较大偏差存在难以行驶的问题,现有测量角度的山路的方法为测量道路的数据,通过公式进行推算,但回型山体测量存在较多困难,例如山路大多存在坡度,测量的数据存在较大偏差,难以将测量数据进一步的精准。
技术实现要素:
3.(一)解决的技术问题
4.针对现有技术现有测量角度的山路的方法为测量道路的数据,通过公式进行推算,但回型山体测量存在较多困难,例如山路大多存在坡度,测量的数据存在较大偏差,难以将测量数据进一步的精准的不足,本发明提供了一种回型山体道路设计角度检测装置及其使用方法。
5.(二)技术方案
6.为实现以上目的,本发明通过以下技术方案予以实现:一种回型山体道路设计角度检测装置,包括外壳,所述外壳的两侧均设置有激光距离感应器,两个所述激光距离感应器均通过调节组件进行上下角度的调整,所述外壳的前端开设有道路护栏卡槽,位于道路护栏卡槽的上下两端所述外壳外壁上均固定连接有滚轮安置板,两个所述滚轮安置板上均活动设置有滑动滚轮,每个所述滑动滚轮位于外壳内测均和滚轮定位组件连接,所述调节组件和滚轮定位组件均设置在外壳设有的内腔上,所述调节组件还连接有探测仪复位校准组件,所述探测仪复位校准组件将激光距离感应器旋转后使其复位与外壳边侧相对平行。
7.作为优选,所述外壳的边角均开设有防磕碰斜槽,所述滑动滚轮包括橡胶外层、转轮、齿杆,每个所述齿杆均活动连接在滚轮安置板开设的空槽上,每个所述齿杆之间等距分布,每个所述齿杆的端部均固定连接有转轮,每个所述转轮的外侧均固定连接有橡胶外层。
8.作为优选,所述滚轮定位组件包括驱动轴、滑杆、丝杆套、固定杆、固定板、齿板,所述驱动轴的两端均转动连接在外壳的内壁上,所述驱动轴包括第一丝杆、第二丝杆、蜗杆,所述蜗杆的两端均固定连接第一丝杆和第二丝杆,所述第一丝杆和第二丝杆上的螺纹相反。
9.作为优选,所述第一丝杆和第二丝杆均套设有丝杆套,所述丝杆套的两端分别固定连接有滑杆和固定杆,所述滑杆滑动连接在外壳内壁开设的滑槽上,所述固定杆的端部
固定连接在固定板上,位于上下两侧所述固定板对立的端部分别固定连接有齿板,所述齿板与齿杆相互啮合。
10.作为优选,所述蜗杆与涡轮相互啮合连接,所述涡轮的侧面与第二电机的输出轴固定连接,所述第二电机通过第二电机套圈固定连接在外壳的内壁上。
11.作为优选,所述调节组件包括第一齿轮、安装支板、第二齿轮、第一电机固定套圈、第一电机,两个所述第一电机以滑槽对称设置,两个所述第一电机均通过第一电机固定套圈固定连接在外壳内壁上,两个所述第一电机的输出轴均固定连接第二齿轮,所述第二齿轮与第一齿轮相互啮合连接,且第一齿轮转动连接在第一活动槽内部。
12.作为优选,所述第一齿轮的前端固定连接有安装支板,所述安装支板的前端固定连接有激光距离感应器,所述探测仪复位校准组件包括滚柱、第一连杆、第二连杆、套柱、第三活动槽、复位弹簧,所述安装支板远离激光距离感应器的侧面呈对称开设有第三活动槽。
13.作为优选,两个所述第三活动槽的内壁均活动连接有滚柱,两个所述滚柱上固定连接有第一连杆,两个所述第一连杆的端部固定连接有套柱,两个所述套柱均套设在第二连杆上,两个所述第二连杆的端部固定在第二活动槽的内壁,每个所述第二连杆均套设有复位弹簧,且所述复位弹簧的一端固定连接在安装支板上,且所述复位弹簧远离安装支板的一端固定在套柱上。
14.同时,本发明还公开了一种回型山体道路设计角度检测装置的使用方法,包括如下操作步骤:
15.s1:首先观察需要测量的山体道路弯角的形状,然后在道路护栏上标记若干个点,使其连接的线段可以接近于山体道路弯角,再将设备搬运至需要测量的山体道路,然后将道路护栏卡槽对准至道路护栏上,通过上下两侧的滑动滚轮使设备分别推运至的标记点上;
16.s2:然后启动第二电机带动涡轮的转动,从而带动了上下两端第一丝杆和第二丝杆的转动,因第一丝杆和第二丝杆的螺纹相反,从而在第二电机转动的过程中使其两侧的丝杆套相互靠近,从而带动了两侧的齿板进行对准下端的齿杆限制齿杆的转动,从而使转轮限制转动通过橡胶外层加大与护栏的摩擦力,从而方便工作人员固定从而收集数据;
17.s3:然后开启激光距离感应器通过第一电机使其第二齿轮的转动带动第一齿轮的转动,从而调节激光距离感应器的转动角度,在相邻的激光距离感应器对接的时候从而测量出两个设备之间的距离,在通过激光距离感应器测量出两侧标记点之间的距离,通过三角形计算出山体弯道的角度大小。
18.(三)有益效果
19.本发明提供了一种回型山体道路设计角度检测装置及其使用方法。具备以下有益效果:
20.1、首先观察需要测量的山体道路弯角的形状,然后在道路护栏上标记若干个点,使其连接的线段可以接近于山体道路弯角,再将设备搬运至需要测量的山体道路,然后将道路护栏卡槽对准至道路护栏上,通过上下两侧的滑动滚轮使设备分别推运至的标记点上,然后启动第二电机带动涡轮的转动,从而带动了上下两端第一丝杆和第二丝杆的转动,因第一丝杆和第二丝杆的螺纹相反,从而在第二电机转动的过程中使其两侧的丝杆套相互靠近,从而带动了两侧的齿板进行对准下端的齿杆限制齿杆的转动,从而使转轮限制转动
通过橡胶外层加大与护栏的摩擦力,从而方便工作人员固定从而收集数据。
21.2、开启激光距离感应器通过第一电机使其第二齿轮的转动带动第一齿轮的转动,从而调节激光距离感应器的转动角度,在相邻的激光距离感应器对接的时候从而测量出两个设备之间的距离,在通过激光距离感应器测量出两侧标记点之间的距离,使设备在测量存在坡度的山路角度的时候,可以通过不同坡度的相邻的激光距离感应器的对准,从而避免了因坡度的存在,造成数据测量存在较大误差,通过三角形计算出山体弯道的角度大小,提高了检测的精准性。
22.3、在测量结束后,第一电机停止运作,然后通过复位弹簧使其套柱向回复位,从而通过滚柱拉动安装支板向回复位,从而使其激光距离感应器可以复位,从而方便了设备下次对电机输入指令,避免了因电机回转输出轴的惯性使激光距离感应器没有复位到原处,造成下次测量的不精准,提高了设备的实用性。
附图说明
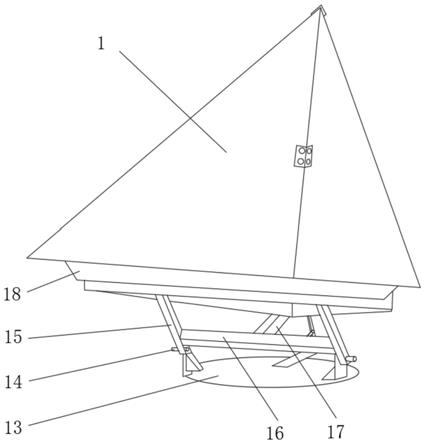
23.图1为本发明的整体结构示意图;
24.图2为本发明的第一活动槽和第二活动槽的示意图;
25.图3为本发明的调节组件的结构示意图;
26.图4为本发明的探测仪复位校准组件的结构示意图;
27.图5为本发明的滚轮安置板的结构示意图;
28.图6为本发明的外壳的内部的结构示意图;
29.图7为本发明的滚轮定位组件的结构示意图;
30.图8为本发明的测量时的结构示意图。
31.其中,1、外壳;2、调节组件;201、第一齿轮;202、安装支板;203、第二齿轮;204、第一电机固定套圈;205、第一电机;3、滑动滚轮;301、橡胶外层;302、转轮;303、齿杆;4、探测仪复位校准组件;401、滚柱;402、第一连杆;403、第二连杆;404、套柱;405、第三活动槽;406、复位弹簧;5、滚轮定位组件;501、驱动轴;502、滑杆;503、丝杆套;504、固定杆;505、固定板;506、齿板;6、防磕碰斜槽;7、滚轮安置板;8、激光距离感应器;9、道路护栏卡槽;10、第一活动槽;11、第二活动槽;12、滑槽;13、蜗杆;14、第一丝杆;15、第二电机;16、第二电机套圈;17、涡轮;18、第二丝杆。
具体实施方式
32.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
33.实施例:如图1、2、3、4、5、6、7、8所示,本发明实施例提供一种回型山体道路设计角度检测装置,包括外壳1,外壳1的两侧均设置有激光距离感应器8,两个激光距离感应器8均通过调节组件2进行上下角度的调整,外壳1的前端开设有道路护栏卡槽9,位于道路护栏卡槽9的上下两端外壳1外壁上均固定连接有滚轮安置板7,两个滚轮安置板7上均活动设置有滑动滚轮3,每个滑动滚轮3位于外壳1内测均和滚轮定位组件5连接,调节组件2和滚轮定位
组件5均设置在外壳1设有的内腔上,调节组件7还连接有探测仪复位校准组件4,探测仪复位校准组件4将激光距离感应器8旋转后使其复位与外壳1边侧相对平行。
34.根据上述技术方案,首先观察需要测量的山体道路弯角的形状,然后在道路护栏上标记若干个点,使其连接的线段可以接近于山体道路弯角,再将设备搬运至需要测量的山体道路,然后将道路护栏卡槽9对准至道路护栏上,通过上下两侧的滑动滚轮3使设备分别推运至的标记点上,然后启动第二电机15带动涡轮17的转动,从而带动了上下两端第一丝杆14和第二丝杆18的转动,因第一丝杆14和第二丝杆18的螺纹相反,从而在第二电机15转动的过程中使其两侧的丝杆套503相互靠近,从而带动了两侧的齿板506进行对准下端的齿杆303限制齿杆303的转动,从而使转轮302限制转动通过橡胶外层301加大与护栏的摩擦力,从而方便工作人员固定从而收集数据。
35.然后开启激光距离感应器8通过第一电机205使其第二齿轮203的转动带动第一齿轮201的转动,从而调节激光距离感应器8的转动角度,在相邻的激光距离感应器8对接的时候从而测量出两个设备之间的距离,在通过激光距离感应器8测量出两侧标记点之间的距离,使设备在测量存在坡度的山路角度的时候,可以通过不同坡度的相邻的激光距离感应器8的对准,从而避免了因坡度的存在,造成数据测量存在较大误差,通过三角形计算出山体弯道的角度大小,提高了检测的精准性。
36.需要说明的是,外壳1的边角均开设有防磕碰斜槽6,滑动滚轮3包括橡胶外层301、转轮302、齿杆303,每个齿杆303均活动连接在滚轮安置板7开设的空槽上,每个齿杆303之间等距分布,每个齿杆303的端部均固定连接有转轮302,每个转轮302的外侧均固定连接有橡胶外层301,在测量结束后,第一电机205停止运作,然后通过复位弹簧406使其套柱404向回复位,从而通过滚柱401拉动安装支板202向回复位,从而使其激光距离感应器8可以复位,从而方便了设备下次对电机输入指令,避免了因电机回转输出轴的惯性使激光距离感应器8没有复位到原处,造成下次测量的不精准,提高了设备的实用性。
37.需要说明的是,滚轮定位组件5包括驱动轴501、滑杆502、丝杆套503、固定杆504、固定板505、齿板506,驱动轴501的两端均转动连接在外壳1的内壁上,驱动轴501包括第一丝杆14、第二丝杆18、蜗杆13,蜗杆13的两端均固定连接第一丝杆14和第二丝杆18,第一丝杆14和第二丝杆18上的螺纹相反,第一丝杆14和第二丝杆18均套设有丝杆套503,丝杆套503的两端分别固定连接有滑杆502和固定杆504,滑杆502滑动连接在外壳1内壁开设的滑槽12上,固定杆504的端部固定连接在固定板505上,位于上下两侧固定板505对立的端部分别固定连接有齿板506,齿板506与齿杆303相互啮合,首先观察需要测量的山体道路弯角的形状,然后在道路护栏上标记若干个点,使其连接的线段可以接近于山体道路弯角,再将设备搬运至需要测量的山体道路,然后将道路护栏卡槽9对准至道路护栏上,通过上下两侧的滑动滚轮3使设备分别推运至的标记点上,然后启动第二电机15带动涡轮17的转动。
38.在本实施例中,蜗杆13与涡轮17相互啮合连接,涡轮17的侧面与第二电机15的输出轴固定连接,第二电机15通过第二电机套圈16固定连接在外壳1的内壁上,调节组件2包括第一齿轮201、安装支板202、第二齿轮203、第一电机固定套圈204、第一电机205,两个第一电机205以滑槽12对称设置,两个第一电机205均通过第一电机固定套圈204固定连接在外壳1内壁上,两个第一电机205的输出轴均固定连接第二齿轮203,第二齿轮203与第一齿轮201相互啮合连接,且第一齿轮201转动连接在第一活动槽10内部,从而带动了两侧的齿
板506进行对准下端的齿杆303限制齿杆303的转动,从而使转轮302限制转动通过橡胶外层301加大与护栏的摩擦力,从而方便工作人员固定从而收集数据。
39.在具体设计的时候,第一齿轮201的前端固定连接有安装支板202,安装支板202的前端固定连接有激光距离感应器8,探测仪复位校准组件4包括滚柱401、第一连杆402、第二连杆403、套柱404、第三活动槽405、复位弹簧406,安装支板202远离激光距离感应器8的侧面呈对称开设有第三活动槽405,两个第三活动槽405的内壁均活动连接有滚柱401,两个滚柱401上固定连接有第一连杆402,两个第一连杆402的端部固定连接有套柱404,两个套柱404均套设在第二连杆403上,两个第二连杆403的端部固定在第二活动槽11的内壁,每个第二连杆403均套设有复位弹簧406,且复位弹簧406的一端固定连接在安装支板202上,且复位弹簧406远离安装支板202的一端固定在套柱404上,从而使其激光距离感应器8可以复位,从而方便了设备下次对电机输入指令,避免了因电机回转输出轴的惯性使激光距离感应器8没有复位到原处,造成下次测量的不精准,提高了设备的实用性。
40.同时,本发明还公开了一种回型山体道路设计角度检测装置的使用方,包括如下操作步骤:
41.s1:首先观察需要测量的山体道路弯角的形状,然后在道路护栏上标记若干个点,使其连接的线段可以接近于山体道路弯角,再将设备搬运至需要测量的山体道路,然后将道路护栏卡槽9对准至道路护栏上,通过上下两侧的滑动滚轮3使设备分别推运至的标记点上;
42.s2:然后启动第二电机15带动涡轮17的转动,从而带动了上下两端第一丝杆14和第二丝杆18的转动,因第一丝杆14和第二丝杆18的螺纹相反,从而在第二电机15转动的过程中使其两侧的丝杆套503相互靠近,从而带动了两侧的齿板506进行对准下端的齿杆303限制齿杆303的转动,从而使转轮302限制转动通过橡胶外层301加大与护栏的摩擦力,从而方便工作人员固定从而收集数据;
43.s3:然后开启激光距离感应器8通过第一电机205使其第二齿轮203的转动带动第一齿轮201的转动,从而调节激光距离感应器8的转动角度,在相邻的激光距离感应器8对接的时候从而测量出两个设备之间的距离,在通过激光距离感应器8测量出两侧标记点之间的距离,通过三角形计算出山体弯道的角度大小
44.工作原理:首先观察需要测量的山体道路弯角的形状,然后在道路护栏上标记若干个点,使其连接的线段可以接近于山体道路弯角,再将设备搬运至需要测量的山体道路,然后将道路护栏卡槽9对准至道路护栏上,通过上下两侧的滑动滚轮3使设备分别推运至的标记点上,然后启动第二电机15带动涡轮17的转动,从而带动了上下两端第一丝杆14和第二丝杆18的转动,因第一丝杆14和第二丝杆18的螺纹相反,从而在第二电机15转动的过程中使其两侧的丝杆套503相互靠近,从而带动了两侧的齿板506进行对准下端的齿杆303限制齿杆303的转动,从而使转轮302限制转动通过橡胶外层301加大与护栏的摩擦力,从而方便工作人员固定从而收集数据。
45.然后开启激光距离感应器8通过第一电机205使其第二齿轮203的转动带动第一齿轮201的转动,从而调节激光距离感应器8的转动角度,在相邻的激光距离感应器8对接的时候从而测量出两个设备之间的距离,在通过激光距离感应器8测量出两侧标记点之间的距离,使设备在测量存在坡度的山路角度的时候,可以通过不同坡度的相邻的激光距离感应
器8的对准,从而避免了因坡度的存在,造成数据测量存在较大误差,通过三角形计算出山体弯道的角度大小,提高了检测的精准性。
46.在测量结束后,第一电机205停止运作,然后通过复位弹簧406使其套柱404向回复位,从而通过滚柱401拉动安装支板202向回复位,从而使其激光距离感应器8可以复位,从而方便了设备下次对电机输入指令,避免了因电机回转输出轴的惯性使激光距离感应器8没有复位到原处,造成下次测量的不精准,提高了设备的实用性。
47.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个引用结构”限定的要素,并不排除在包括要素的过程、方法、物品或者设备中还存在另外的相同要素。
48.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。