1.本发明涉及动物监控技术领域,具体涉及一种基于小样本深度学习的野生动物目标监控识别设备。
背景技术:
2.在山林等野生动物保护区,为了了解动物的活动情况,有时会在保护区内设置多个基于小样本深度学习的野生动物目标监控识别设备,监控识别设备可以拍摄到相关动物图像,然后根据动物图像数据来判断是哪种动物,从而了解动物的相关活动范围,同时也可以根据拍摄的图像,来向保护区附近的居民发出预警,提醒居民避开大象等大型生物。
3.现有的基于小样本深度学习的野生动物目标监控识别设备在使用时,通常会将监控识别设备安装在树木上,由于监控设备安装数量较多,且有时需要将监控设备安装在高处的树干上,这样需要携带攀爬设备,而在山林中携带攀爬设备并不方便,使得安装较为麻烦。
技术实现要素:
4.为了克服上述的技术问题,本发明的目的在于提供一种基于小样本深度学习的野生动物目标监控识别设备,通过齿轮一与齿轮二啮合传动,卷线机构可以通过连接线带动传动杆转动,从而使传动机构通过夹装机构将固定机构夹靠在树干上,从而将摄像机构安装在树干上,这样不需要使用攀爬设备攀爬树木,有利于保证安装人员的安全,且举升模块体积较小,便于携带,有利于安装的进行。
5.本发明的目的可以通过以下技术方案实现:
6.一种基于小样本深度学习的野生动物目标监控识别设备,包括安装模块与举升模块,所述安装模块包括安装板,所述安装板顶面设置有夹装机构,所述夹装机构顶部设置有摄像机构,可以通过摄像机构对动物进行拍摄,所述夹装机构一侧固定连接有两个固定机构,可以通过夹装机构将两个固定机构夹靠在树木上,所述安装板背离固定机构的侧面固定连接有与夹装机构传动连接的传动机构,所述传动机构底部固定连接有连接框,所述连接框内侧面转动连接有支撑杆,所述支撑杆侧壁固定套接有齿轮一与皮带轮二,且皮带轮二与传动机构传动连接,所述安装板底面固定连接有矩型块,所述举升模块包括举升杆,所述举升杆顶端固定连接有与矩型块滑动插接的插块,所述插块侧壁固定连接有传动盒,所述传动盒内侧壁转动连接有传动杆,所述传动杆侧壁固定套接有与齿轮一啮合传动的齿轮二,所述举升杆底端固定连接有卷线机构,所述传动杆侧壁卷绕有的两个连接线,且两个连接线底端卷绕在卷线机构上,卷线机构可以通过连接线带动出传动杆转动,传动杆可以通过齿轮一与齿轮二带动支撑杆转动,支撑杆可以通过皮带轮二带动传动机构,传动机构可以通过夹装机构将两个固定机构夹靠在树木上,从而将安装模块固定在树木上,且安装完成后,可以将插块与矩型块分离,并使齿轮一与齿轮二脱离,这样可以在地面上完成摄像机构的安装,安装人员不需要使用攀爬设备爬上树木进行安装,且不需要寻找树干足够粗,可
以攀爬的树木,有利于节省安装时间,同时有利于保证安装人员的安全,且举升模块的体积较小,携带较为方便,有利于安装的进行。
7.进一步在于:所述夹装机构包括两个转动杆,两个所述转动杆底面均与安装板顶面接触,所述转动杆一端与相邻固定机构固定连接,且转动杆另一端通过轴杆转动连接有与传动机构传动连接的驱动块,所述安装板顶面固定连接有与两个转动杆转动连接的固定块,且固定块顶面与摄像机构固定连接,传动机构可以通过驱动块使转动杆转动,从而使两个固定机构相向移动夹靠在树上,安装较为简单,且可以将固定机构夹靠在不同粗细的树干上,便于安装的进行。
8.进一步在于:所述传动机构包括固定杆,所述固定杆内侧面转动连接有双向丝杆,所述双向丝杆侧壁两侧均旋合连接有与固定杆内侧面滑动连接的滑动块,所述滑动块侧面顶部与相邻驱动块内侧面滑动连接,所述固定杆底面对应连接框开设有收纳槽,所述双向丝杆位于收纳槽内的侧面固定套接有皮带轮一,所述皮带轮一与皮带轮二通过皮带传动连接,支撑杆可以通过皮带轮一与皮带轮二带动双向丝杆转动,从而使两个滑动块相向移动,从而带动驱动块相向移动,使转动杆转动,双向丝杆可以对转动杆进行锁止,在双向丝杆不转动时,转动杆将无法带动固定机构移动,有利于简化安装步骤,节约安装时间,便于使用。
9.进一步在于:所述摄像机构包括安装架,所述安装架底端一侧与固定块顶面固定连接,且安装架底端另一侧与固定杆顶面固定连接,所述安装架顶面固定连接有固定框,所述固定框内侧面固定连接有摄像头,可以通过摄像头对动物进行拍摄。
10.进一步在于:所述固定机构包括u型架,所述u型架两端均转动连接有连接座,所述连接座侧面固定连接有夹板,转动杆可以通过u型架向树干移动,从而使四个夹板夹靠在树干上,通过固定机构将安装模块固定在树干上。
11.进一步在于:所述夹板侧面固定连接有若干凸块,凸块可以增加夹板与树干间的摩擦力,有利于提高安装的稳定性。
12.进一步在于:所述卷线机构包括固定壳,所述固定壳内侧面与举升杆底端侧面固定连接,所述固定壳内侧面转动连接有卷线杆,两个所述连接线底端均穿过固定壳顶端卷绕在卷线杆上,两个所述连接线在卷线杆上卷绕方向相反,且两个连接线顶端在传动杆上的卷绕方向相反,所述卷线杆位于固定壳外的一端固定连接有转把,可以通过转把转动卷线杆,这时卷线杆将会卷收一个连接线,并放开另一个连接线,这样卷线杆可以通过连接线带动传动杆转动,同时卷线杆反向转动时,卷线杆可以通过连接线带动传动杆反向转动,便于使用,所述固定壳顶面固定连接有与传动盒底端固定连接的软管,所述连接线穿过相邻软管内部,软管可以对连接线进行保护,避免树枝勾住连接线,使传动杆转动。
13.进一步在于:所述举升杆内侧面旋合连接有与矩型块内侧面旋合连接的固定丝杆,固定丝杆可以将举升杆与矩型块相互连接,有利于增加安装模块与举升模块连接的稳定性。
14.本发明的有益效果:
15.1、通过齿轮一与齿轮二啮合传动,卷线机构可以通过连接线带动传动杆转动,传动杆可以通过齿轮一与齿轮二带动支撑杆转动,支撑杆可以通过皮带轮二带动传动机构,传动机构可以通过夹装机构将固定机构夹靠在树干上,然后可以直接向下移动举升模块,使安装模块与举升模块分离,从而将摄像机构安装在树干上,在将摄像机构安装在较高位
置时,安装人员可以通过举升模块进行安装,不需要使用攀爬设备攀爬树木,有利于保证安装人员的安全,且举升模块体积较小,便于携带,有利于安装的进行;
16.2、通过转动杆与固定块转动连接,支撑杆可以通过皮带一与皮带轮二带动双向丝杆转动,从而使两个滑动块相向移动,滑动块可以通过驱动块带动两个转动杆转动,从而使两个固定机构相向移动夹在树上,将安装模块固定在树上较为简单,便于安装,同时可以适应不同直径大小的树木,有利于安装的进行。
附图说明
17.下面结合附图对本发明作进一步的说明。
18.图1是本发明该设备整体结构示意图;
19.图2是本发明中的安装模块结构示意图;
20.图3是本发明中的安装板与夹装机构结构示意图;
21.图4是本发明中的夹装机构与传动机构结构示意图;
22.图5是本发明中的安装板侧视图;
23.图6是本发明中的固定杆与连接框内部正视图;
24.图7是本发明中的举升模块结构示意图;
25.图8是本发明中的举升模块正视图;
26.图9是本发明中的举升杆内部正视图。
27.图中:100、安装模块;110、安装板;111、矩型块;120、传动机构;121、固定杆;122、双向丝杆;123、滑动块;124、皮带轮一;130、固定块;140、摄像机构;141、固定框;142、摄像头;143、安装架;150、夹装机构;151、转动杆;152、驱动块;160、固定机构;161、u型架;162、连接座;163、夹板;170、连接框;171、齿轮一;172、皮带轮二;200、举升模块;210、举升杆;211、固定丝杆;212、插块;220、卷线机构;221、固定壳;222、卷线杆;223、转把;230、软管;240、传动盒;241、传动杆;242、齿轮二。
具体实施方式
28.下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
29.请参阅图1
‑
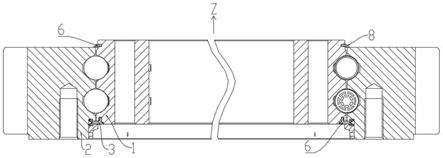
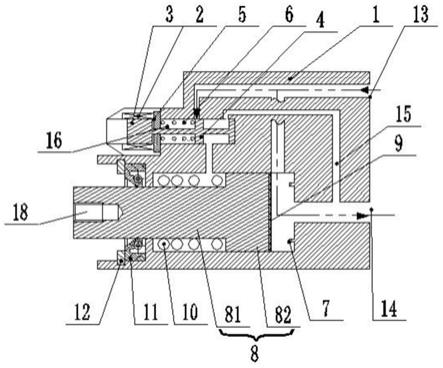
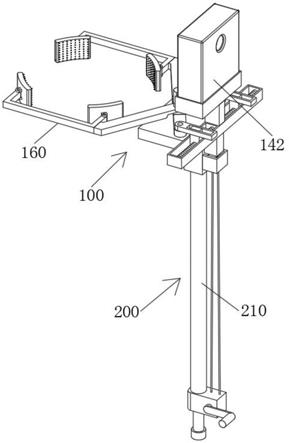
9所示,一种基于小样本深度学习的野生动物目标监控识别设备,包括安装模块100与举升模块200,安装模块100包括安装板110,安装板110顶面设置有夹装机构150,夹装机构150顶部设置有摄像机构140,可以通过摄像机构140对动物进行拍摄,夹装机构150一侧固定连接有两个固定机构160,可以通过夹装机构150将两个固定机构160夹靠在树木上,安装板110背离固定机构160的侧面固定连接有与夹装机构150传动连接的传动机构120,传动机构120底部固定连接有连接框170,连接框170内侧面转动连接有支撑杆,支撑杆侧壁固定套接有齿轮一171与皮带轮二172,且皮带轮二172与传动机构120传动连接,安装板110底面固定连接有矩型块111,举升模块200包括举升杆210,举升杆210顶端固定连接有与矩型块111滑动插接的插块212,插块212侧壁固定连接有传动盒240,传动盒240内侧壁
转动连接有传动杆241,传动杆241侧壁固定套接有与齿轮一171啮合传动的齿轮二242,举升杆210底端固定连接有卷线机构220,传动杆241侧壁卷绕有的两个连接线,且两个连接线底端卷绕在卷线机构220上,卷线机构220可以通过连接线带动出传动杆241转动,传动杆241可以通过齿轮一171与齿轮二242带动支撑杆转动,支撑杆可以通过皮带轮二172带动传动机构120,传动机构120可以通过夹装机构150将两个固定机构160夹靠在树木上,从而将安装模块100固定在树木上,且安装完成后,可以将插块212与矩型块111分离,并使齿轮一171与齿轮二242脱离,这样可以在地面上完成摄像机构140的安装,安装人员不需要使用攀爬设备爬上树木进行安装,且不需要寻找树干足够粗,可以攀爬的树木,有利于节省安装时间,同时有利于保证安装人员的安全,且举升模块200的体积较小,携带较为方便,有利于安装的进行。
30.夹装机构150包括两个转动杆151,两个转动杆151底面均与安装板110顶面接触,转动杆151一端与相邻固定机构160固定连接,且转动杆151另一端通过轴杆转动连接有与传动机构120传动连接的驱动块152,安装板110顶面固定连接有与两个转动杆151转动连接的固定块130,且固定块130顶面与摄像机构140固定连接,传动机构120可以通过驱动块152使转动杆151转动,从而使两个固定机构160相向移动夹靠在树上,安装较为简单,且可以将固定机构160夹靠在不同粗细的树干上,便于安装的进行。
31.传动机构120包括固定杆121,固定杆121内侧面转动连接有双向丝杆122,双向丝杆122侧壁两侧均旋合连接有与固定杆121内侧面滑动连接的滑动块123,滑动块123侧面顶部与相邻驱动块152内侧面滑动连接,固定杆121底面对应连接框170开设有收纳槽,双向丝杆122位于收纳槽内的侧面固定套接有皮带轮一124,皮带轮一124与皮带轮二172通过皮带传动连接,支撑杆可以通过皮带轮一124与皮带轮二172带动双向丝杆122转动,从而使两个滑动块123相向移动,从而带动驱动块152相向移动,使转动杆151转动,双向丝杆122可以对转动杆151进行锁止,在双向丝杆122不转动时,转动杆151将无法带动固定机构160移动,有利于简化安装步骤,节约安装时间,便于使用。
32.摄像机构140包括安装架143,安装架143底端一侧与固定块130顶面固定连接,且安装架143底端另一侧与固定杆121顶面固定连接,安装架143顶面固定连接有固定框141,固定框141内侧面固定连接有摄像头142,可以通过摄像头142对动物进行拍摄。固定机构160包括u型架161,u型架161两端均转动连接有连接座162,连接座162侧面固定连接有夹板163,转动杆151可以通过u型架161向树干移动,从而使四个夹板163夹靠在树干上,通过固定机构160将安装模块100固定在树干上。夹板163侧面固定连接有若干凸块,凸块可以增加夹板163与树干间的摩擦力,有利于提高安装的稳定性。
33.卷线机构220包括固定壳221,固定壳221内侧面与举升杆210底端侧面固定连接,固定壳221内侧面转动连接有卷线杆222,两个连接线底端均穿过固定壳221顶端卷绕在卷线杆222上,两个连接线在卷线杆222上卷绕方向相反,且两个连接线顶端在传动杆241上的卷绕方向相反,卷线杆222位于固定壳221外的一端固定连接有转把223,可以通过转把223转动卷线杆222,这时卷线杆222将会卷收一个连接线,并放开另一个连接线,这样卷线杆222可以通过连接线带动传动杆241转动,同时卷线杆222反向转动时,卷线杆222可以通过连接线带动传动杆241反向转动,便于使用,固定壳221顶面固定连接有与传动盒240底端固定连接的软管230,连接线穿过相邻软管230内部,软管230可以对连接线进行保护,避免树
枝勾住连接线,使传动杆241转动。举升杆210内侧面旋合连接有与矩型块111内侧面旋合连接的固定丝杆211,固定丝杆211可以将举升杆210与矩型块111相互连接,有利于增加安装模块100与举升模块200连接的稳定性。
34.工作原理:使用时,将举升杆210带动插块212与传动盒240向矩型块111移动,使矩型块111插在插块212内,并使传动盒240对应连接框170,这样齿轮二242将会与齿轮一171啮合,然后转动固定丝杆211,使固定丝杆211旋到矩型块111内,将举升杆210与矩型块111连接,然后可以举起举升杆210,将安装模块100靠近树木,使树干位于两个固定机构160之间,然后通过转把223转动卷线杆222,使卷线杆222卷收一个连接线,同时卷线杆222将放开另一个连接线,这样通过两个连接线可以带动传动杆241转动,传动杆241可以通过齿轮一171与齿轮二242带动支撑杆转动,支撑杆可以通过皮带轮一124与皮带轮二172带动双向丝杆122转动,从而使两个滑动块123相向移动,从而使两个驱动块152相向移动,驱动块152可以带动转动杆151转动,使两个转动杆151位于固定机构160一侧的一端相向转动,带动两个u型架161相向移动,使四个夹板163夹在树上,从而使安装模块100夹在树上,然后可以通过摄像头142进行拍摄;
35.将安装模块100固定在树上后,反向转动固定丝杆211,使固定丝杆211与矩型块111脱离,这时可以直接向下移动举升杆210,带动插块212与矩型块111脱离,同时使齿轮二242与齿轮一171脱离,从而使安装模块100与举升模块200脱离,需要取下安装模块100对摄像头142进行维修时,举起举升杆210,将插块212与矩型块111连接,齿轮一171与齿轮二242啮合,并转动固定丝杆211将举升杆210与矩型块111相互连接,然后通过转把223反向转动卷线杆222,卷线杆222可以通过连接线带动传动杆241反向转动,使支撑杆可以通过皮带轮一124与皮带轮二172带动双向丝杆122反向转动,从而使两个滑动块123相背移动,滑动块123可以通过夹装机构150带动两个u型架161相背移动,从而使夹板163从树上树上松开,然后可以通过举升杆210将安装模块100从树上取下,对摄像头142进行维修等工作。
36.在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
37.以上内容仅仅是对本发明所作的举例和说明,所属本技术领域的技术人员对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离发明或者超越本权利要求书所定义的范围,均应属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。