1.本发明属于骨外科学手术辅助系统领域,尤其涉及下肢机械轴导航系统、下肢手术导航方法以及存储介质。
背景技术:
2.在骨科诊疗中,无论是下肢矫形、骨折复位,还是人工关节置换手术,均涉及力线、机械轴的保持与恢复,精确的下肢力线恢复是上述手术成功的首要因素。国内绝大多数医院施行的下肢骨折复位、矫形、关节置换手术仍停留于传统手术操作。手术过程中采用传统的手指触摸法,依靠个人经验和手感来判断和辨认骨性标志,从而定位手术器械,进而指导手术进行。传统治疗方式存在诸多问题亟待解决。主要表现为:1)没有摆脱医师主观性;2)对下肢力线的复位局限于平面内的复位,难以实现三维精准复位;3)术中辅助器械的操作,没有精确的截骨标准;4)易产生残留畸形或矫形过度引发术后并发症。
3.wo2006/092600a1公开了一种计算机实施方法,用于自动规划要在患者的身体部分上执行的外科手术流程。然后使用从患者的真实身体部位导出的数据将虚拟模型变形为身体部位,从而还调整计划的外科手术的部分以反映患者真实身体部位的解剖结构。
4.然而,针对在下肢放置植入物的骨科手术进行下肢机械轴导航的方法目前还存在缺陷。
技术实现要素:
5.为解决现有骨科手术中力线判断的弊端,本发明结合计算机技术提供一种下肢机械轴导航系统、下肢手术导航方法以及存储介质。本发明不但可以弥补术中术者凭经验判断力线时主观误差大的弊端,而且还可以减少医患辐射暴露、节省手术时间、可以实现下肢骨科微创化、精准化、个体化、智能化的特点,有效降低医疗风险,从根本上提高医疗质量。本发明的技术方案如下:
6.一种下肢机械轴导航系统,包括相互电连接的ndi光学跟踪仪器、操作系统和显示器;
7.其中,所述ndi光学跟踪仪器用于术中实时追踪患者下肢结构及动态;
8.所述操作系统中包含术前测量模块、术中追踪模块和力线实时评估模块;
9.所述术前测量模块用于根据ct数据建立患者下肢骨骼三维模型,根据体表点标记方法在模型上定位第一初始坐标,将所述模型转换为以第一初始坐标作为坐标原点的第一坐标系;在第一坐标系上,以第一初始坐标为坐标原点,定位第二初始坐标、第三初始坐标和第四初始坐标,并根据获得的初始坐标得到两条特征轴线及其夹角,通过该夹角与正常角度值的对比,辅助医生进行可视化手术方案的规划;其中第一初始坐标与患者股骨头中心点相关联,第二初始坐标与股骨膝关节中心点相关联,第三初始坐标与胫骨膝关节中心点相关联,所述第四初始坐标与踝关节中心点相关联;
10.术中追踪模块用于将术前规划获得的四个初始坐标与真实患骨配准,更新初始坐
标;随着术中患骨的运动,利用所述ndi光学跟踪仪器将四个初始坐标转换为追踪状态下任意时刻的四个当前坐标,再转换到图像语言,从而实现患骨的动态位置追踪;
11.力线实时评估模块用于根据术中追踪模块获取的追踪状态下四个当前坐标,连接四个当前坐标绘制特征轴线,再转换到图像语言,实时追踪术中下肢力线的变化;其中,所述四个当前坐标分别对应股骨头中心点,股骨膝关节中心点,胫骨膝关节中心点和踝关节中心点。
12.还公开了一种利用下肢机械轴导航系统的下肢手术导航方法,包括以下步骤:
13.步骤一:术前测量
14.将患者下肢全长断层扫描ct数据以dicom图像格式导入系统,然后通过图像分割及三维重建技术,建立患者下肢骨骼三维模型;
15.基于图像分割技术和点云技术,利用体表点标记方法在模型上定位第一初始坐标,将所述模型转换为以第一初始坐标作为坐标原点的第一坐标系;在第一坐标系上,以第一初始坐标为坐标原点,定位第二初始坐标、第三初始坐标和第四初始坐标;根据四个初始坐标获得两条特征轴线及其夹角,通过该夹角与正常角度值的对比,辅助医生进行可视化手术方案的规划;
16.其中第一初始坐标与患者股骨头中心点相关联,第二初始坐标与股骨膝关节中心点相关联,第三初始坐标与胫骨膝关节中心点相关联,所述第四初始坐标与踝关节中心点相关联;
17.步骤二:术中追踪
18.在手术过程中,将术前测量获得的四个初始坐标与真实患骨配准,更新初始坐标;随着术中患骨的运动,利用ndi光学跟踪仪器将四个初始坐标转换为追踪状态下任意时刻的四个当前坐标,再转换到图像语言,从而实现患骨的动态位置追踪;
19.步骤三:实时评估力线
20.利用单侧运动学转换方法获取髋关节中心点,根据步骤二获得的追踪状态下四个当前坐标,连接四个当前坐标绘制特征轴线,再转换到图像语言,实时追踪术中下肢力线的变化;其中,所述四个当前坐标分别对应股骨头中心点,股骨膝关节中心点,胫骨膝关节中心点和踝关节中心点。
21.进一步,所述第一坐标系的正向分别指向人体解剖位的内侧、前侧以及下侧;其中,所述第一坐标系包括冠状面:由股骨头中心点、股骨内侧髁最远点以及股骨外侧髁最远点三点确定的平面完全定义;矢状面:垂直于冠状面,并且通过股骨头中心点与pcl前侧1cm位置所确定的直线;水平面:垂直于冠状面和矢状面,并且通过股骨头中心。
22.进一步的,所述特征轴线分别是股骨机械轴和胫骨机械轴,其中连接股骨头中心点和股骨膝关节中心点确定股骨机械轴,连接胫骨膝关节中心点和踝关节中心点确定胫骨机械轴,所述两轴线夹角计算公式如下:
[0023][0024]
其中l1是股骨机械轴,l2是胫骨机械轴,l1=[l
1x l
1y l
1z
]
t
、l2=[l
2x l
2y l
2z
]
t
为两轴线的矢量形式。
[0025]
还公开了一种计算机可读取存储介质,其上存储有计算机程序,用于实现上述下
肢导航方法的步骤。
[0026]
本发明的有益效果是:结合ndi光学跟踪仪器的二次开发,设计简易,易于实现。本发明根据患者术前ct数据,实现下肢骨特征点的提取以及角度的计算,帮助医生进行术前规划;术中经患骨的匹配以及坐标系的转换实现术中实时追踪;利用单侧运动学转换方法以及体表点标记方法获取患者关节中心,绘制下肢机械轴,实现力线矫正的实时评估。本发明不但可以弥补术中术者凭经验判断力线时主观误差大的弊端,而且还可以减少医患辐射暴露、节省手术时间、可以实现下肢骨科微创化、精准化、个体化、智能化的特点,有效降低医疗风险,从根本上提高医疗质量。
附图说明
[0027]
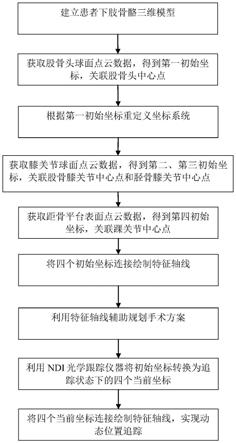
图1是本发明所述的下肢手术导航方法的流程图。
具体实施方式
[0028]
为使本发明实施例的目的、技术方案、有益效果及显著进步更加清楚,下面,将结合本发明实施例中所提供的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所有描述的这些实施例仅是本发明的部分实施例,而不是全部的实施例;基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0029]
如图1所示,一种下肢机械轴导航系统,包括ndi光学跟踪仪器、操作系统和显示器;所述操作系统中包含术前测量模块、术中追踪模块和力线实时评估模块,
[0030]
其中,所述ndi光学跟踪仪器用于术中实时追踪患者下肢结构及动态;
[0031]
所述术前测量模块用于根据ct数据建立患者下肢骨骼三维模型,根据体表点标记方法在模型上定位第一初始坐标,将所述模型转换为以第一初始坐标作为坐标原点的第一坐标系;在第一坐标系上,以第一初始坐标为坐标原点,定位第二初始坐标、第三初始坐标和第四初始坐标;并根据获得的初始坐标得到两条特征轴线及其夹角,其中第一初始坐标与患者股骨头中心点相关联,第二初始坐标与股骨膝关节中心点相关联,第三初始坐标与胫骨膝关节中心点相关联,所述第四初始坐标与踝关节中心点相关联;
[0032]
术中追踪模块用于将术前规划获得的四个初始坐标与真实患骨配准,更新初始坐标;随着术中患骨的运动,利用ndi光学跟踪仪器将四个初始坐标转换为追踪状态下任意时刻的四个当前坐标,再转换到图像语言,从而实现患骨的动态位置追踪。力线实时评估模块用于根据术中追踪模块获取的追踪状态下四个当前坐标,连接四个当前坐标绘制特征轴线,再转换到图像语言,实时追踪术中下肢力线的变化;其中,所述四个当前坐标分别对应股骨头中心点,股骨膝关节中心点,胫骨膝关节中心点和踝关节中心点。
[0033]
还公开了一种利用下肢机械轴导航系统的下肢手术导航方法,包括以下步骤:
[0034]
步骤1:以dicom图像格式导入患者下肢全长断层扫描ct数据,然后通过图像分割及三维重建,建立患者下肢骨骼三维模型,将三维视化显示在显示屏上;
[0035]
步骤2:基于图像分割技术,在显示器上框选拾取模型上除股骨头凹与股骨头颈之外的股骨头数据,从而获取球面点云数据;任取不共面四点p
i
(x
i
,y
i
,z
i
)i=1,2,3,4,由解析几何我们可以求出球心坐标o0和半径r0,利用非线性拟合lsqnonlint函数完成球心坐标
的精准计算,其函数原型为:
[0036]
p=lsqnonlin(fun,p0)
ꢀꢀ
(1)
[0037][0038]
其中p
i
为输入点云数据,p为所求球心坐标与半径,oo为球心坐标,ro为半径;
[0039]
计算得出股骨头球心坐标作为股骨头中心点,记为第一初始坐标;
[0040]
步骤3:以第一初始坐标,即股骨头中心点,作为坐标原点定义下肢模型解剖平面及坐标系统,建立第一坐标系,且所述第一坐标系的正向分别指向人体解剖位的内侧、前侧以及下侧;其中,所述第一坐标系包括冠状面:由股骨头中心点、股骨内侧髁最远点以及股骨外侧髁最远点三点确定的平面完全定义;矢状面:垂直于冠状面,并且通过股骨头中心点与pcl前侧1cm位置所确定的直线;水平面:垂直于冠状面和矢状面,并且通过股骨头中心;并定义模型解剖结构坐标,建立第一坐标系,
[0041]
步骤4:在显示器上分别框选拾取模型上股骨内外髁下端表面与胫骨平台两侧凹表面,继而获取特征表面区域点云数据,结合导入模型坐标系,进而进行极限点的计算。
[0042]
p
low
=min(p
i
‑
z
),p
top
=max(p
i
‑
z
),i=1,2
…
n
ꢀꢀ
(3)
[0043]
其中,n是点云中点的数量,i
‑
z是特征表面区域中点云范围内任一点在第一坐标系z方向的坐标。
[0044]
从而定位膝关节中心点;其中,将股骨膝关节中心定位于股骨内外髁最低点连线的中点,记为第二初始坐标,而胫骨膝关节中心定位于胫骨平台两侧凹陷最低点连线的中点,记为第三初始坐标。
[0045]
步骤5:在显示器上利用框选拾取距骨平台表面点云数据,进而对点云数据进行计算获取质心坐标
[0046][0047]
其中,p是质心坐标,n是点云中点的数量,i是特征表面区域中点云范围内任一点,p
i
是i的坐标;
[0048]
将距骨平台表面点云质心作为踝关节中心点,记为第四初始坐标;
[0049]
步骤6:利用反余弦函数计算特征轴线的夹角,其中连接第一初始坐标和第二初始坐标,(即连接股骨头中心点和股骨膝关节中心点)确定股骨机械轴,连接第三初始坐标和第四初始坐标(即连接胫骨膝关节中心点和踝关节中心点)确定胫骨机械轴,所述两轴线夹角计算公式如下:
[0050][0051]
其中l1是股骨机械轴,l2是胫骨机械轴,l1=[l
1x l
1y l
1z
]
t
、l2=[l
2x l
2y l
2z
]
t
为两轴线的矢量形式;
[0052]
步骤7:根据上述步骤获得的参数以及特征轴线,在显示器上显示患者下肢的三维模型并标注股骨机械轴和胫骨机械轴,并计算两轴线的夹角,通过该夹角与正常角度值的对比,辅助医生进行可视化手术方案的规划;
[0053]
步骤8:在手术过程中,在ndi光学跟踪仪器定义的手术坐标系下,将根据体表点标
记方法在三维模型中获得的四个初始坐标与术中真实患骨配准,随后将四个初始坐标利用两侧三点的空间配准方法,误差补偿等,实现患骨的快速有效配准,从而更新初始坐标;
[0054]
随着术中患骨的运动,利用ndi光学跟踪仪器将四个初始坐标转换为追踪状态下任意时刻的四个当前坐标,再转换到图像语言,从而实现患骨的动态位置追踪;
[0055]
步骤9:术中利用单侧运动学转换方法获取髋关节中心,根据上一步骤获得的追踪状态下四个当前坐标,连接四个当前坐标绘制特征轴线,再转换到图像语言,实时追踪术中下肢力线的变化;其中,所述四个当前坐标分别对应股骨头中心点,股骨膝关节中心点,胫骨膝关节中心点和踝关节中心点。
[0056]
本领域普通技术人员可以理解实现上述方法的全部或部分流程是通过计算机程序来指令相关软件完成的,所述计算机程序存储于计算机的可读取存储介质中,其上存储有计算机程序,用于实现上述下肢导航方法的步骤。
[0057]
以上各实施例和具体案例仅用以说明本发明的技术方案,而非是对其的限制,尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换,而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围,本领域技术人员根据本说明书内容所做出的非本质改进和调整或者替换,均属本发明所要求保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。