用于手术装置的电动手柄组件
1.相关申请的交叉引用
2.本技术主张2020年5月11日提交的第63/022,979号美国临时专利申请的权益和优先权,所述美国临时专利申请的整个内容以引用的方式并入本文中。
技术领域
3.此技术大体上涉及手柄组件,且更具体地说,涉及用于电动手术缝合装置的直列式手柄组件。
背景技术:
4.通常在手术过程中使用手术装置来执行各种不同的手术操作,举几个例子来说包含缝合、抓握、切割和密封组织。通常,手术装置包含例如外科医生之类的临床医生抓握以致动手术装置的手柄组件。某些类型的手术装置执行多项任务并且具有不同的能力,以允许装置更容易接近体腔内的组织。例如,电动手术缝合装置包含致动按钮,所述致动按钮用于接近缝合装置的工具组件的钳口、用于将缝合钉施加到组织上并且用于切割组织。这些缝合装置还可包含旋钮,以便于工具组件相对于手柄组件进行铰接和/或旋转。
5.在手术过程中,临床医生可能必须在执行例如,使组织稳定之类的第二任务的同时操作缝合装置。在此类过程中,如果缝合装置包含手柄组件,则临床医生可以用一只手操作手柄组件以空出临床医生的另一只手来执行其它操作,这将是有利的。
技术实现要素:
6.在方面中,本公开大体上涉及一种包含电动直列式手柄组件的手术装置,所述手术装置包含用于致动和铰接所述手术装置的末端执行器的致动器,以允许单手操作所述手术装置。所述致动器彼此紧密地定位在手柄组件上,以方便临床医生的抓握手使用。所述手柄组件包含电池,所述电池接收在电池盖的可移动隔室中,以允许在使用后移除和回收所述电池。所述手柄组件还包含手动释放机构,所述手动释放机构允许在紧急情况下手动缩回所述手柄组件的击发杆组件。
7.本公开的一个方面涉及一种用于手术装置的手柄组件,所述手柄组件包含固定主体、远侧主体部分、击发杆组件、电动机、释放构件和电池盖。所述固定主体包含近侧部分和远侧部分,并且限定空腔。所述固定主体的所述远侧部分和所述近侧部分各自限定开口。所述固定主体具有外部抓握表面。所述远侧主体部分从所述固定主体向远侧延伸穿过所述固定主体的所述远侧部分中的所述开口。所述远侧主体部分限定纵向轴线,并且所述固定主体的所述抓握表面围绕所述纵向轴线定位。所述击发杆组件包含在所述远侧主体部分内延伸的击发杆,以及驱动杆。所述驱动杆支撑在所述固定主体的所述空腔内并且具有联接到所述击发杆的远侧部分,以及近侧部分。所述电动机包含支撑在所述固定主体的所述空腔内的驱动轴。所述电动机联接到所述驱动杆并且能操作以使所述驱动杆在缩回位置与推进位置之间移动。所述驱动杆在其缩回位置与推进位置之间的移动使所述击发杆在缩回位置
与推进位置之间移动。所述释放构件附接到所述驱动杆的所述近侧部分并且延伸穿过所述固定主体的所述近侧部分。所述电池盖支撑在所述固定主体的所述近侧部分上并且能在打开位置与闭合位置之间移动。当所述电池盖处于所述闭合位置时所述释放构件延伸到所述电池盖中,并且当所述电池盖处于其打开位置时所述释放构件是易接近的。
8.在本公开的各方面中,所述释放构件支撑横向构件,并且所述电池壳限定导引槽,当所述电池盖从所述打开位置朝向所述闭合位置移动时,所述导引槽接收所述横向构件以导引所述电池盖。
9.本公开的另一方面涉及一种手术缝合装置,其包含手柄组件和末端执行器。所述手柄组件包含固定主体、远侧主体部分、击发杆组件、电动机、释放构件和电池盖。所述固定主体包含近侧部分和远侧部分,并且限定空腔。所述固定主体的所述远侧部分和所述近侧部分各自限定开口。所述固定主体具有外部抓握表面。所述远侧主体部分从所述固定主体向远侧延伸穿过所述固定主体的所述远侧部分中的所述开口。所述远侧主体部分限定纵向轴线,并且所述固定主体的所述抓握表面围绕所述纵向轴线定位。所述击发杆组件包含在所述远侧主体部分内延伸的击发杆,以及驱动杆。所述驱动杆支撑在所述固定主体的所述空腔内并且具有联接到所述击发杆的远侧部分,以及近侧部分。所述电动机包含支撑在所述固定主体的所述空腔内的驱动轴。所述电动机联接到所述驱动杆并且能操作以使所述驱动杆在缩回位置与推进位置之间移动。所述驱动杆在其缩回位置与推进位置之间的移动使所述击发杆在缩回位置与推进位置之间移动。所述释放构件附接到所述驱动杆的所述近侧部分并且延伸穿过所述固定主体的所述近侧部分。所述电池盖支撑在所述固定主体的所述近侧部分上并且能在打开位置与闭合位置之间移动。当所述电池盖处于所述闭合位置时所述释放构件延伸到所述电池盖中,并且当所述电池盖处于其打开位置时所述释放构件是易接近的。所述末端执行器支撑在所述手柄组件的所述远侧主体部分上,并且包含砧座组件和钉仓组件。所述砧座组件和所述钉仓组件能相对于彼此在打开位置与夹持位置之间移动。
10.在本公开的各方面中,所述击发杆组件包含连接器,所述连接器牢固地联接到所述驱动杆并且可旋转地联接到所述击发杆。
11.在本公开的一些方面中,带螺纹的击发螺母联接到所述电动机,并且所述驱动杆带螺纹并且与所述带螺纹的击发螺母接合,使得所述带螺纹的击发螺母响应于所述电动机的致动而进行的旋转引起所述驱动杆在其缩回位置与推进位置之间的纵向移动。
12.在本公开的某些方面,所述电动机通过直齿轮和击发螺母齿轮联接到所述带螺纹的击发螺母。所述直齿轮固定到所述电动机的所述驱动轴,并且所述击发螺母齿轮固定到所述带螺纹的击发螺母。
13.在本公开的各方面中,所述释放构件牢固地固定到所述驱动杆的所述近侧部分。
14.在本公开的一些方面,所述释放构件包含支撑横向轴的近侧部分,所述横向轴定位在所述固定主体的近端。
15.在本公开的某些方面,铰接组件包含铰接旋钮,所述铰接旋钮能围绕所述固定主体的所述远侧部分并且围绕所述纵向轴线旋转。
16.在本公开的各方面中,所述铰接组件包含牢固地固定到所述铰接旋钮的铰接螺母,以及铰接螺钉。
17.在本公开的一些方面中,所述铰接螺母包含内螺纹,并且所述铰接螺钉包含与所述铰接螺母的所述内螺纹接合的外螺纹,使得所述铰接旋钮的旋转引起所述铰接螺母的旋转以实现所述铰接螺钉的纵向移动。
18.在本公开的某些方面中,所述铰接组件包含铰接连杆,所述铰接连杆联接到所述铰接螺钉并且支撑在所述手柄组件的所述远侧主体部分内,以在推进位置与缩回位置之间进行纵向移动。
19.在本公开的各方面中,所述铰接螺母包含纵向肋,并且所述铰接旋钮限定接收所述纵向肋的内部狭槽,以将所述铰接旋钮固定到所述铰接螺母。
20.在本公开的一些方面中,所述固定主体支撑至少一个致动按钮,用于控制所述电动机的操作。
21.在本公开的某些方面中,印刷电路板支撑在所述固定主体内并且包含电连接到所述电动机和所述至少一个致动按钮的处理器。
22.在本公开的各方面中,所述印刷电路板包含旋转编码器,所述旋转编码器测量所述电动机的所述驱动轴的速度和方向。
23.在本公开的一些方面中,usb端口联接到所述印刷电路板。
24.在本公开的某些方面中,所述远侧主体部分具有适于可释放地接合末端执行器的远侧部分。
25.在本公开的各方面中,所述电池盖在所述打开位置与所述闭合位置之间可枢转地支撑在所述固定主体的所述近侧部分上。
26.在本公开的一些方面中,电池壳可释放地联接到所述电池盖并且限定被配置成接收电池的空腔。
27.在本公开的各方面中,所述末端执行器形成重新装载组件的一部分,所述重新装载组件可释放地联接到所述手柄组件的所述远侧主体部分。
28.从以下描述将理解本公开的其它特征。
附图说明
29.下面参考附图描述根据本公开的手柄组件的各个方面,在附图中:
30.图1是从所公开的电动手柄组件的远侧末端看的侧面透视图;
31.图2是从图1所示的电动手柄组件的近侧末端看的侧面透视图;
32.图3是图1所示的电动手柄组件的分解图;
33.图4是图2所示的电动手柄组件的侧透视图,其中移除了半部主体;
34.图5是图2所示的电动手柄组件的侧面透视图,其中移除了半部主体、移除了外管并且移除了旋转旋钮;
35.图6是沿着图1的剖面线6
‑
6截取的横截面图;
36.图7是图6所示的指示细节区域的放大视图;
37.图8是沿着图6的剖面线8
‑
8截取的横截面视图;
38.图9是图8所示的指示细节区域的放大视图;
39.图10是沿着图1的剖面线10
‑
10截取的横截面视图;
40.图11是沿着图1的剖面线11
‑
11截取的横截面视图;
41.图12是沿着图6的剖面线12
‑
12截取的横截面视图;
42.图13是图1所示的手柄组件的近侧部分的侧面透视图,其中移除了半部主体和电池盖;
43.图14是图1所示的手柄组件的近侧部分的侧面透视图,其中电池盖处于打开位置;
44.图15是沿着图14的剖面线15
‑
15截取的横截面视图;并且
45.图16是穿过图1所示的电动手柄组件的电池盖和电池截取的横截面视图。
具体实施方式
46.现将参考图式详细地描述所公开的手术装置,在图式中,相同参考标号指代若干视图中的每一个中的相同或对应元件。然而,应理解,本公开的各方面仅仅是本公开的示例,并且可以各种形式实施。为了避免在不必要的细节上模糊本公开,未对众所周知的功能或构造进行详细描述。因此,本文中所公开的具体结构和功能细节不应被解释为限制性的,而是仅作为权利要求书的基础,并且作为用于教示所属领域的技术人员以在实际上任何适当的详细结构中来不同地采用本公开的代表性基础。此外,例如前部、后部、上部、下部、顶部、底部、远侧、近侧的方向术语以及类似术语用于帮助理解描述,且并不旨在限制本公开。
47.在此描述中,术语“近侧”通常用于指代装置的较靠近临床医生的部分,而术语“远侧”通常用于指代装置的离临床医生较远的部分。此外,术语“临床医生”通常用于指医务人员,包含医生、护士和保障人员。
48.本公开涉及一种包含电动直列式手柄组件的手术装置,所述手术装置包含用于致动和铰接所述手术装置的末端执行器的致动器,以允许单手操作所述手术装置。所述致动器彼此紧密地定位在手柄组件上,以方便临床医生的抓握手使用。所述直列式手柄组件接收在临床医生的手掌中,并且允许临床医生通过简单地旋转临床医生的手腕来旋转手术装置的末端执行器,从而避免了对额外旋转机构的需要。电池接收在电池盖的可移动隔室中,以允许在使用后移除和回收电池。所述手柄组件包含手动释放机构,所述手动释放机构允许在紧急情况下手动缩回所述手柄组件的击发杆组件。
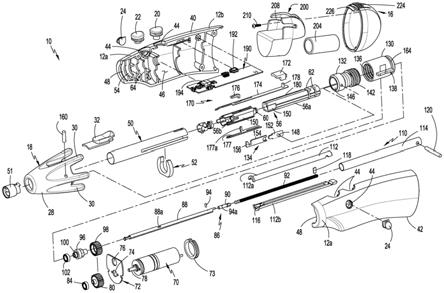
49.图1和2示出了所公开的用于手术缝合装置2的电动手柄组件的方面,所述电动手柄组件通常示出为手柄组件10。可以设想,手柄组件10可以与除缝合装置之外的各种不同类型的手术装置一起使用。手柄组件10包含固定主体12和从固定主体12的远侧部分12a延伸并且限定纵向轴线“x”的远侧主体部分14。固定主体12包含支撑电池盖16的近侧部分12b,所述电池盖可在闭合位置(图1)与打开位置(图14)之间移动,以便于将一个或多个电池放置到电动手柄组件10中。固定主体12的远侧部分12a支撑例如可通过临床医生的手指的动作进行手动操作的铰接旋钮18,以控制支撑在手柄组件10的远侧主体部分14上的重新装载组件“ra”的末端执行器300的铰接。包含末端执行器300的重新装载组件“ra”在图1中以虚线示出。在本公开的各方面中,重新装载组件“ra”联接到手柄组件10的固定主体12的远侧部分12a,并且末端执行器300可以响应于铰接旋钮18的致动而围绕横向于纵向轴线“x”的轴线枢转。手柄组件10的固定主体12还包含多个致动按钮,以操作末端执行器300的各种功能,例如夹持、缝合和切割。在本公开的一些方面中,固定主体12支撑控制末端执行器300的开口的第一致动按钮20和控制末端执行器300的夹持和击发的第二致动按钮22,其中击发包含缝合和/或切割组织。在本公开的一些方面中,安全按钮24支撑在手柄组件10的
固定主体12的每一侧上。在本公开的各方面中,在可操作致动按钮22以击发末端执行器300之前,必须按下或致动安全按钮24。
50.在本公开的各方面中,末端执行器300包含砧座组件302和钉仓组件304。砧座组件302和钉仓组件304联接在一起,以在打开位置与夹持位置之间移动,以分别在砧座组件302与钉仓组件304之间夹持组织。钉仓组件304支撑多个缝合钉(图中未示),这些缝合钉支撑在刀狭槽(图中未示)的相对侧的凹座中。末端执行器包含驱动构件(图中未示),所述驱动构件可相对于砧座组件302和钉仓组件304移动以使砧座组件和钉仓组件移动到夹持位置,以从钉仓组件304射出缝合钉和/或切割组织。有关包含砧座组件和钉仓组件的示例性末端执行器的更详细描述,请参见第10,123,799号美国专利(“'799专利”)。
51.可以设想,末端执行器300可以永久地附接到手柄组件10的远侧主体部分14,并且不需要形成可释放的重新装载组件的一部分。
52.固定主体12沿着与手柄组件10的远侧主体部分14的纵向轴线“x”基本对齐的轴线延伸。在本公开的各方面中,手柄组件10的固定主体12包含抓握表面26,所述抓握表面围绕纵向轴线“x”定位,并且根据人体工程学被配置成由临床医生抓握。在此方面,固定主体12可以沿着纵向轴线“x”稍微弯曲和/或包含凹槽以接收临床医生的一个或多个手指。致动按钮20和22、安全按钮24和铰接旋钮18都彼此紧密地支撑在固定主体12上,以便于临床医生单手操作手柄组件10。固定主体12包含侧壁,所述侧壁限定下面将进一步详细描述的usb端口29。
53.在本公开的一些方面中,铰接旋钮18围绕固定主体12的远侧部分12a旋转地支撑,并且包含裙状花边(scalloped)主体28,所述裙状花边主体包含向近侧延伸的指状件30。向近侧延伸的指状件30朝向致动按钮20和22并且朝向安全按钮24向近侧延伸,以便于单手操作手柄组件12。在本公开的一些方面中,铰接旋钮18支撑下面将进一步详细描述的重新装载释放按钮32。在本公开的某些方面中,最近侧的按钮20、22和24与铰接旋钮18的指状件30的近侧末端之间的距离为约1英寸到约3英寸,并且可以为约2英寸。在本公开的其它方面中,最近侧的按钮20、22和24与指状件30的近侧末端之间的距离小于3英寸。
54.图3
‑
12示出了手柄组件10的内部部件。手柄组件10的固定主体12由模制半部40和42形成,所述模制半部使用例如螺钉43(图5)或以焊接之类的方式固定在一起,以限定固定手柄12内的空腔46。固定主体12的半部40和42中的每一个限定开口44的开口或部分,所述开口或部分接收手柄组件10的致动按钮20和22以及安全按钮24。远侧部分12a限定开口48,所述开口接收手柄组件10的远侧主体部分14。
55.手柄组件10的远侧主体部分14包含外管50,所述外管延伸穿过固定主体12的远侧部分12a中的开口48,并且与空腔46连通。外管50焊接在套环52上,并且套环位于固定主体12的半部40与42之间的狭槽54(图9)内,以将外管50固定在固定主体12内。外管50的远侧末端接收构件51,所述构件限定内部通道(图中未示),所述内部通道引导重新装载组件“ra”(图1)以卡口式方式与手柄组件10的远侧主体部分14接合。
56.手柄组件10的远侧主体部分14包含牢固地保持在外管50内的壳体56。在本公开的各方面中,壳体56包含近侧壳体56a(图3)和远侧壳体56b,所述近侧壳体和所述远侧壳体限定通孔58(图7)。远侧壳体56b包含接收在近侧壳体56a的远侧末端内的延伸件60(图3)。在本公开的各方面中,近侧壳体56a包含环形狭槽62(图3),所述环形狭槽接收在固定主体12
的半部40和42的内壁上形成的肋64(图9),以将壳体56固定在外管50内。包含近侧壳体56a和远侧壳体56b的壳体56限定远侧主体部分14内的通道,所述通道导引手柄组件10的内部部件的移动,如下面进一步详细描述。
57.手柄组件支撑电动机70,所述电动机接收在固定主体12的空腔46内。电动机70固定到安装板72的近侧,所述安装板通过螺钉等固定在固定主体12的空腔46内。电动机70接收在橡胶电动机振动阻尼器73内,所述橡胶电动机振动阻尼器支撑在固定主体12的空腔46内。在本公开的各方面中,振动阻尼器73限定中心通道73a(图5),所述中心通道接收肋75(图6)。安装板72包含第一孔74(图3)和第二孔76。电动机70的驱动轴78延伸穿过安装板72的第一孔74并且固定到直齿轮80。直齿轮80限定d形孔82(图11),并且驱动轴78是d形的,使得驱动轴78的旋转引起直齿轮80的对应旋转。直齿轮80的远侧末端和驱动轴78通过轴承84支撑在固定主体12内。
58.击发杆组件86(图3)支撑在手柄组件10的固定主体12内。击发杆组件86包含击发杆88、连接器90和带螺纹的驱动杆92。击发杆88包含凹口88a(图3)。连接器90限定横向孔94a(图3),并且通过接收在横向孔94a内的销94牢固地联接到击发杆88的近侧末端。驱动杆92的远侧末端可旋转地联接到连接器90,使得驱动杆92的轴向移动引起连接器90的轴向移动和击发杆88的轴向移动。
59.驱动杆92的远侧末端接收在带螺纹的击发螺母96(图7)中,并且带螺纹的击发螺母96固定在击发螺母齿轮98内,使得击发螺母齿轮98的旋转引起击发螺母96的旋转。击发螺母齿轮98和击发螺母96轴向固定在手柄组件10的固定主体12内。在本公开的各方面中,击发螺母96具有外八边形配置(图11),并且击发螺母齿轮98的内表面具有内八边形配置,所述内八边形配置与击发螺母96的外八边形配置接合,以将击发螺母齿轮98牢固地固定到击发螺母96上。在本公开的各方面中,击发螺母96的远侧末端限定支撑在轴承102上的毂100(图3)。
60.如上所述,击发螺母96是带螺纹的并且与击发杆组件86的带螺纹的驱动杆92接合。当致动电动机70以使驱动轴78旋转时,固定到直齿轮80的驱动轴78使直齿轮80旋转。直齿轮80与击发螺母齿轮96接合,使得直齿轮80的旋转引起击发螺母齿轮98的旋转。当击发螺母齿轮98旋转时,击发螺母96与击发螺母齿轮98一起旋转。由于击发螺母96轴向固定在手柄组件10的固定主体12内,击发螺母96相对于带螺纹的驱动杆92的旋转引起击发杆96的纵向移动,进而引起击发杆88穿过手柄组件10的远侧主体部分14的对应轴向移动。击发杆88的远侧末端被配置成接合重新装载组件“ra”(图1)的驱动构件(图中未示)。'799专利公开了一种手柄组件和一种可释放地联接到手柄组件的重新装载组件,所述手柄组件包含可释放地联接到重新装载组件的驱动构件的击发杆。
61.手柄组件10包含手动缩回机构110(图3),当电池盖16打开时,所述手动缩回机构方便穿过固定主体12的近侧部分12b(图14)使用,以便于在电动手柄组件10变得不可操作时手动缩回击发杆88。手动缩回机构110包含围绕带螺纹的驱动杆92接收的释放壳体112和释放构件或管114。释放壳体112由两个半部112a和112b形成,所述两个半部限定纵向通孔116。释放壳体112接收在释放管114内,以防止释放壳体112的半部112a和112b(图3)分离。驱动杆92通过按键118(图6)牢固地联接到释放壳体112。释放壳体112通过横向销或轴120联接到释放管114。横向销120延伸穿过释放管114近侧末端的开口122并且穿过释放壳体
112近侧末端的开口124,以将释放管114牢固地联接到释放壳体112。当释放管114通过转动横向销120而旋转时,释放壳体112和驱动杆92在手柄组件10的固定主体12内旋转。当驱动杆92相对于带螺纹的击发螺母96旋转时,驱动杆92和击发杆88在手柄组件10内纵向移动。驱动杆将根据击发螺母96的旋转方向向近侧或向远侧移动。
62.铰接旋钮18形成铰接组件的一部分,所述铰接组件包含铰接螺母130、铰接螺钉132和铰接连杆134。铰接螺母130限定带螺纹的纵向通孔136(图3),并且包含纵向肋138(图10)。纵向肋138接收在限定于铰接旋钮18内表面内的狭槽140(图10)内。围绕手柄组件10的远侧主体部分14(图1)的壳体56的近侧壳体56a(图3)接收铰接螺母130。铰接螺钉132包含外部带螺纹的表面142并且限定内部纵向通孔146(图3)。铰接螺钉132接收在铰接螺母130的带螺纹的通孔136内。
63.铰接连杆134通过销148(图3)固定到铰接螺钉132的内表面,所述销固定到铰接连杆134并且从所述铰接连杆径向向外延伸。铰接连杆134可滑动地定位在纵向凹槽150内,所述纵向凹槽限定在手柄组件10的远侧主体部分14的壳体56的外表面内。纵向凹槽150(图3)将铰接连杆134限制为在手柄组件10的远侧主体部分14的外管50内纵向移动。在本公开的各方面中,铰接连杆134可以由近侧连杆部分152和远侧连杆部分154形成。替代地,铰接连杆134可以由整体构造形成。铰接连杆134包含远侧钩156(图5),所述远侧钩被配置成当重新装载组件“ra”联接到手柄组件10的远侧主体部分14时可释放地接合重新装载组件“ra”(图1)中的铰接连杆(图中未示)。
64.铰接旋钮18通过销160(图3)联接到铰接螺母130。铰接螺母130包含近侧凸缘164(图9),所述近侧凸缘接收在限定于手柄组件10的固定主体12内的环形凹槽166内,并且便于铰接螺母130相对于手柄组件110的固定主体12旋转。将铰接螺母130的近侧凸缘164接收在固定主体112的环形凹槽166内能防止铰接螺母130相对于固定主体12的纵向移动。
65.当临床医生使铰接旋钮18围绕纵向轴线“x”(图1)旋转时,用销固定到铰接旋钮18的铰接螺母130也围绕纵向轴线“x”旋转。当铰接螺母130相对于固定主体112旋转时,限定铰接螺母130的通孔136的螺纹接合铰接螺钉132的带螺纹的表面142上的螺纹,并且使铰接螺钉132在手柄组件110的固定主体112内纵向移动。当铰接螺钉132在手柄组件12的固定主体112内纵向移动时,铰接连杆134在手柄组件10的远侧主体部分14(图1)的外管50内纵向移动。如上所述,铰接连杆134的远侧部分包含钩156,所述钩与重新装载组件“ra”(图1)中的铰接连杆(图中未示)接合,使得铰接连杆134的纵向移动引起重新装载组件“ra”的末端执行器300围绕横向于手柄组件110的远侧主体部分114的纵向“x”(图1)的轴线铰接。'799专利公开了一种重新装载组件,其包含铰接连杆,所述铰接连杆被配置成以类似于本文所述的方式可释放地联接到适配器组件的铰接连杆。
66.手柄组件10还包含锁定机构170(图3),当重新装载组件“ra”联接到手柄组件10时,所述锁定机构固定击发杆88的轴向定向和径向定向。锁定组件170将不包含在手术缝合装置2中,在所述手术缝合装置中,末端执行器300牢固地联接到手柄组件10的远侧主体部分。在本公开的各方面中,锁定机构170包含释放按钮32、连接器172、释放连杆174、锁定构件176和重新装载检测连杆177(图3)。释放按钮32可滑动地支撑在铰接旋钮30的两个相邻指状件30之间的铰接旋钮18上,并且与连接器172接合。连接器172通过立柱178(图3)联接到释放连杆174。释放连杆174可滑动地支撑在限定于手柄组件12的远侧主体部分14的壳体
56(图3)中的通道180中。锁定构件176支撑在壳体56中的凹槽182(图7)中,并且延伸穿过释放连杆174中的狭槽174。锁定构件176可在从击发杆88中的凹口88a间隔开的位置到击发杆88的凹口88a内接收的位置之间枢转。重新装载检测连杆177包含延伸到手柄组件10的远侧主体部分14的远侧末端的远侧末端和与释放连杆174接合的指状件177a。
67.如上所陈述,通过将重新装载组件“ra”的近侧末端插入远侧主体部分14的远侧末端并且随后相对于远侧主体部分14旋转重新装载组件“ra”以形成卡口式联接,来将重新装载组件“ra”联接到手柄组件10的远侧主体部分14。当重新装载组件“ra”插入远侧主体部分14中时,重新装载组件“ra”接合重新装载检测连杆177的远侧末端以使重新装载检测连杆177向近侧移动。重新装载检测连杆177接合释放连杆174并且使释放连杆174在远侧主体部分14内向近侧移动。当释放连杆174向近侧移动时,释放连杆174在偏置构件(图中未示)的力的作用下接合锁定构件176并且使所述锁定构件凸轮到其接收在击发杆88中的凹口88a内的锁定位置。
68.当重新装载组件“ra”相对于手柄组件10的远侧主体部分14旋转时,以将重新装载组件“ra”联接到远侧主体部分14,图中未示的偏置构件使释放连杆174向远侧移动到将重新装载组件“ra”锁定在手柄组件10的远侧主体部分14上的位置,即阻止重新装载组件“ra”相对于手柄组件10的远侧主体部分14的旋转的位置。为了在击发重新装载组件“ra”之后从手柄组件10的远侧主体部分14释放重新装载组件“ra”,必须向近侧移动释放按钮,以将释放连杆移动到允许重新装载旋转以使重新装载组件“ra”与远侧主体部分14断开联接的位置。有关操作锁定机构170的更详细描述,请参见'799专利。
69.手柄组件10支撑印刷电路板(pcb)190(图5),所述印刷电路板接收在固定主体12的空腔46内并且电联接到电动机70、致动按钮20和22以及安全按钮24。pcb 190容纳电动机控制器、联接到致动按钮和安全按钮20、22和24(图3)的开关以及控制手柄组件10的操作以控制末端执行器300(图1)的致动的处理器。在本公开的一些方面,usb插口192连接到pcb190,并且可以用于与处理器通信以存取例如荷载规范。usb插口192可通过固定主体12中的端口29(图2)使用。pcb 190还可以通过用于测量电动机匝数的旋转编码器联接到光电晶体管194。在本公开的各方面中,旋转编码器是测量电动机70的驱动轴的速度和方向的正交编码器。
70.控制器可以包含用于操作所公开的手术缝合装置或其部件的任何合适的电气部件。控制器可以包含任何类型的计算装置、计算电路、或能够执行存储在存储器中的一系列指令的任何类型的处理器或处理电路。控制器可包含多个处理器和/或多核中央处理单元(cpu)并且可包含任何类型的处理器,例如微处理器、数字信号处理器、微控制器、可编程逻辑装置(pld)、现场可编程门阵列(fpga)等。控制器还可以包含用于存储数据和/或指令的存储器,当所述数据和/或指令由一个或多个处理器执行时,使一个或多个处理器执行一种或多种方法和/或算法。
71.图13
‑
16示出了固定主体12的近侧部分12b和电池盖16。电池盖16支撑电池壳200,所述电池壳限定用于接收电池204的空腔202(图16)。电池壳200包含导引部分206(图13),所述导引部分限定了一对导引槽208,所述导引槽接收支撑在释放管114的近侧末端上的横向销120,以在电池盖从其打开位置朝向其闭合位置枢转时导引电池盖16。使用例如将电池204固定在电池盖16内的螺钉210,以将电池壳200固定在电池盖16内。电池壳200包含侧壁
212(图16),所述壁限定凹部212a,所述凹部接收形成在手柄组件10的固定主体12的近侧部分12b上的圆形突起214,以可枢转地将电池盖16固定到固定主体12的近侧部分12b。
72.固定主体12的近侧部分12b限定凹槽220(图15),所述凹槽位于与圆形突起214沿直径相对的位置。电池盖16包含柔性凸片224,所述柔性凸片包含锥形止挡件226,当电池盖16移动到闭合位置以将电池盖16锁定在闭合位置时,所述锥形止挡件以扣合方式接收在凹槽220中。可以向内按压柔性凸片224,以从凹槽220内移除锥形止挡件226,以使电池盖16移动到其打开位置。固定主体12的近侧部分12b限定开口225(图14)。
73.图14示出了处于打开位置的电池盖16。在此位置,释放管114上的横向销120位于固定主体12的近侧并且可方便临床医生使用。如上所述,如果电动手柄组件10停用,电池盖16可枢转到打开位置,以允许临床医生通过抓握横向销120并且旋转释放管114来手动旋转释放管114,从而相对于击发螺母齿轮96旋转驱动杆92以缩回或推进击发杆组件86。
74.所公开的手柄组件10和缝合装置2将用于致动和铰接手术装置的末端执行器的致动器和铰接旋钮彼此紧密地放置,以允许单手操作手术装置。直列式手柄组件10接收在临床医生的手掌中,并且允许临床医生通过简单地旋转临床医生的手腕来旋转手术装置的末端执行器300(图1),从而避免了对额外旋转机构的需要。电池204接收在电池盖16的可移动隔室中,以允许在使用后移除和回收电池。手动释放管214和销120允许在紧急情况下手动缩回击发杆组件86。
75.本领域的技术人员将理解,在本文中具体描述且在附图中示出的装置和方法是本公开的非限制性的示例性方面。可以预见的是,在不脱离本公开的范围的情况下,结合一个示例性实施例说明或描述的元件和特征可以与另一个的元件和特征组合。同样,本领域的技术人员将基于上文所描述的本公开的各方面理解本公开的其它特征和优点。因此,除了由所附权利要求指示之外,本公开不受已特别展示和描述的内容的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。