1.本发明涉及新能源汽车电池更换技术领域,尤其涉及一种用于更换新能源汽车电池的设备和相应换电方法。
背景技术:
2.目前,换电这种新的能源补充方式的出现,能够避免充电设施不足、充电等待等情况,缓解新能源汽车的“里程焦虑”,从而为解决充电耗时长、充电设施容易拥堵等问题提供了新的思路。在一些现有技术中还提供了自动化地换电方案,如中国专利cn110606057b中公开了一种换电机器人,其包括自校正平台,自校正平台与取放托盘连接,自校正平台包括实现取放托盘旋转的自校正机构,及实现取放托盘横向移动的微调机构;当换电机器人与作业机器人对位不准导致有横向间距时,可以通过微调机构将取放托盘横向移动至作业机器人的电池箱出入口,当换电机器人与作业机器人对位不准导致有夹角时,可以通过自校正机构调整以将机器人与作业机器人对正,可以精准的调整电池的位置和姿态。其自校正平台只能矫正将取放托盘横向移动或者沿着竖直轴转动,其不能够修正取放托盘的沿水平轴的角度,电池箱接线端子与车载接线端子在高度方向仍旧存在对位误差。
3.尤其是在某些常见的应用场景如为公共交通、货运等运营车辆的换电设施中,成组的电池箱质量大,电池转运托盘伸出存放电池箱时,大重量电池箱导致的电池转运托盘水平倾斜的原因有三,其一,如图2(b)所示电池转运托盘相对于底板的固定连接存在由于制造精度导致的活动裕度,不可不免的使得电池箱重力对伸出的电池转运托盘施加的旋转力矩导致的电池转运托盘倾斜;其二,如图2(b)所示,电池转运托盘相对于底板的固定连接处存在随着大重量电池箱的重复装载出现零件磨损导致的各零件之间出现了更宽的活动裕度,不可避免地使得电池箱重力对伸出的电池转运托盘施加的旋转力矩导致的电池转运托盘倾斜;其三,如图2(c)所示,在电池转运托盘伸出时,前后行走轮承受不同的力,前轮变形比后轮大,导致装载后的电池转运托盘相对于装载前,更加沿水平轴水平倾斜,并且不同质量的电池箱导致行走轮的变形不同,致使不同质量的电池箱导致的取放托盘的水平倾斜角度不同。
4.电池转运托盘水平倾斜后,电池箱水平推入电池储存机构或者电池仓时,电池箱的接线端子与电池储存机构或者电池仓的接线端子存在对位误差,极易造成电池箱、电池储存机构和电池仓的接线端子的损坏,降低接线端子的寿命。
5.因此,如何在换电设备中提供一种结构简单、精确度较高且低成本的电池储存机构水平度调校方式,对电池转运托盘的水平度进行补偿或者微调,以便保证将满电的电池箱推入电池仓时,消除电池箱的接线端子与电池仓接线端子之间水平度的对位误差,是本领域中亟待解决的技术问题。
技术实现要素:
6.针对上述本领域中所存在的技术问题,本发明提供了一种用于更换新能源汽车电
池的设备,
7.包括:行走轮、电池转运托盘、升降架、升降机构、重量感测模块、数据处理模块、水平角度微调机构以及电池储存机构;
8.其中,行走轮支撑升降机构,并实现所述设备移动;
9.所述电池转运托盘用于从新能源汽车电池仓或电池储存机构上取放电池箱;所述电池转运托盘能够相对于所述升降架转动。
10.所述升降架通过升降机构带动电池转运托盘上下移动;
11.所述重量感测模块设置于所述电池转运托盘上,用于感测电池箱的重量,并将重量感测结果发送到所述数据处理模块;
12.数据处理模块,根据存储的电池箱重量与所述倾角调整值的第一映射关系,获得倾角调整值;
13.水平角度微调机构,根据所述倾角调整值调整所述电池转运托盘相对于所述升降架的水平角度;
14.完成电池转运托盘相对于所述升降架的水平角度调整之后,控制升降架带动电池转运托盘升降至放电池箱的目标高度,以将电池箱水平推入电池储存机构或者电池仓。
15.进一步地,所述电池仓或电动汽车或电池储存机构上设有定位标识,所述电池转运托盘的面向电池仓的一端设置有用于感测所述定位标识的定位感测模块;
16.完成调整电池转运托盘相对于所述升降架的水平角度之后,才基于定位感测模块和定位标识控制升降架带动电池转运托盘升降至放电池箱的目标高度。
17.相应地,本发明还提供了一种使用前述设备更换新能源汽车电池的方法,具体包括以下步骤:
18.s1、从新能源汽车电池仓或电池储存机构上取出电池箱至电池转运托盘;
19.s2、设置于所述电池转运托盘上的重量感测模块感测电池箱重量,并将重量感测结果发送到所述数据处理模块;
20.s3、所述数据处理模块,根据存储的电池箱重量与倾角调整值的第一映射关系,获得所述倾角调整值;
21.s4、水平角度微调机构根据所述倾角调整值调整所述电池转运托盘相对于所述升降架的水平角度;
22.s5、完成调整电池转运托盘相对于所述升降架的水平角度之后,控制升降架带动电池转运托盘升降至目标高度;
23.s6、电池转运托盘在目标高度处将电池箱水平推入电池储存机构或者电池仓。
24.进一步地,在完成所述水平角度调整后,由所述电池转运托盘的面向电池仓处设置的定位感测模块,对所述电池仓或电动汽车或电池储存机构上设置的定位标识进行感测;
25.所述步骤s5基于定位感测模块和定位标识控制升降架带动电池转运托盘升降至目标高度。
26.进一步地,所述电池转运托盘的面向电池仓的一端设置有用于感测所述定位标识的定位感测模块;
27.进一步地,每隔预定间隔,进行电池转运托盘倾斜角度自校正步骤,所述倾斜角度
自校正步骤包括:
28.在更换新能源汽车电池的设备未投入使用时,在电池转运托盘未装载电池的情况下,将电池转运托盘上升至其升降行程的最顶端位置,行走轮带动电池转运托盘移动至校正标尺前方特定距离h处,此时定位感测模块对准定位标尺获得高度a作为目标校准高度;
29.在更换新能源汽车电池的设备使用特定时间后,电池转运托盘未装载电池的情况下,将电池转运托盘上升至其升降行程的最顶端位置,行走轮带动电池转运托盘移动至校正标尺前方特定距离h处,此时定位感测模块对准定位标尺获得高度b作为当前校准高度;
30.利用水平角度微调机构调整电池转运托盘的水平角度,使得定位感测模块对准的定位标尺位置由当前校准高度移动至目标校准高度处,并将当前的电池转运托盘的倾斜角度位置作为校正后的倾斜角度初始位置。
31.本发明具有如下有益效果:
32.上述本发明所提供的设备和方法,为适应不同重量电池箱对换电设施所造成的不同程度的电池转运托盘倾斜、形变,行走轮形变等诸多情况,通过感测电池箱重量来对不同负载情况下电池转运托盘的水平倾斜角度进行针对性的调校,消除换电设备对电池箱水平度的影响,消除电池箱的接线端子与电池储存机构或者电池仓的接线端子存在的对位误差。
33.本发明根据存储的电池箱质量与倾角调整值的第一映射关系,获得倾角调整值,消除了行走轮变形对电池转运托盘水平度的影响,在保证有益技术效果实现的同时极大地节约了制造成本,相对于使用高精度水平仪减少了成本,相对于低成本低精度的水平仪提高了角度调整效果。
34.本发明的电池转运托盘的水平倾斜角度调整方法结合定位感测模块,实现换电过程中电池箱的接线端子与电池储存机构或者电池仓的接线端子精准对位。
35.此外,每隔预定间隔,进行电池转运托盘倾斜角度自校正步骤,有利于消除由于制造精度导致的电池转运托盘自然倾斜,以及长期使用重复装载出现零件磨损和变形导致的电池转运托盘自然倾斜。
附图说明
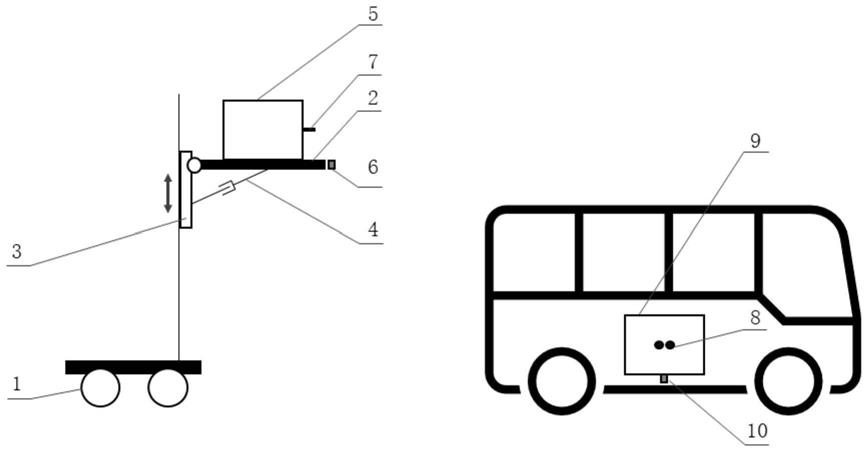
36.图1,本发明新能源汽车的电池更换设备结构示意图。
37.图2,(a)理想情况下电池转运托盘装载后不发生倾斜示意图;
38.(b)制造精度、零件磨损和变形导致的电池转运托盘自然倾斜示意图;
39.(c)行走轮变形导致的电池转运托盘自然倾斜示意图;
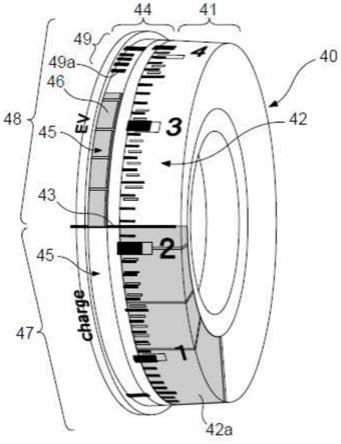
40.图3,电池转运托盘倾斜角度自校正示意图。
具体实施方式
41.下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
42.如图1所示,本发明所提供的用于新能源汽车的电池更换设备,包括:行走轮1、电池转运托盘2、升降架3、升降架、升降机构、重量感测模块、数据处理模块、水平角度微调机
构以及电池储存机构;
43.其中,行走轮支撑升降机构,并实现所述设备移动;
44.所述电池转运托盘用于从新能源汽车电池仓9或电池储存机构上取放电池箱5;所述电池转运托盘能够相对于所述升降架转动。
45.所述升降架通过升降机构带动电池转运托盘上下移动;
46.所述重量感测模块设置于所述电池转运托盘上,用于感测电池箱的重量,并将重量感测结果发送到所述数据处理模块;
47.数据处理模块,根据存储的电池箱重量与所述倾角调整值的第一映射关系,获得倾角调整值;
48.水平角度微调机构,根据所述倾角调整值调整所述电池转运托盘相对于所述升降架的水平角度;通过感测电池箱重量来对不同负载情况下电池转运托盘的水平倾斜角度进行针对性的调校,消除换电设备对电池箱水平度的影响,消除电池箱的接线端子与电池储存机构或者电池仓的接线端子7、8存在的对位误差。
49.完成电池转运托盘相对于所述升降架的水平角度调整之后,控制升降架带动电池转运托盘升降至放电池箱的目标高度,以将电池箱水平推入电池储存机构或者电池仓。
50.具体地,所述电池仓或电动汽车或电池储存机构上设有定位标识10,所述电池转运托盘上设置有用于感测所述定位标识的定位感测模块6;由于定位感测模块安装在电池转运托盘的一侧,因此需要在使用定位感测模块定位目标高度之前完成电池转运托盘的水平度,从而保证电池转运托盘升至有效目标高度。
51.完成调整电池转运托盘相对于所述升降架的水平角度之后,才基于定位感测模块和定位标识控制控制升降架带动电池转运托盘升降至取放电池箱的目标高度。
52.本领域技术人员根据这种教导能够想到借助现有的多种方式实现精确对准过程,譬如定位标识采用图像标识或距离标识,所述定位感测模块采用图像采集设备如摄像头,或距离测量设备如激光测距仪等,相应地所述数据处理模块通过图像处理或测距方式实现所述精确对准。
53.本发明还提供了一种使用前述设备更换新能源汽车电池的方法,具体包括以下步骤:
54.s1、从新能源汽车电池仓或电池储存机构上取出电池箱至电池转运托盘;
55.s2、设置于所述电池转运托盘上的重量感测模块感测电池箱重量,并将重量感测结果发送到所述数据处理模块;
56.s3、所述数据处理模块,根据存储的电池箱重量与倾角调整值的第一映射关系,获得所述倾角调整值;
57.s4、水平角度微调机构根据所述倾角调整值调整所述电池转运托盘相对于所述升降架的水平角度;
58.s5、完成调整电池转运托盘相对于所述升降架的水平角度之后,控制升降架带动电池转运托盘升降至目标高度;
59.其中,所述电池仓或电动汽车或电池储存机构上设有定位标识,所述电池转运托盘的面向电池仓的一端设置有用于感测所述定位标识的定位感测模块;
60.所述步骤s5基于定位感测模块和定位标识控制升降架带动电池转运托盘升降至
目标高度。
61.s6、电池转运托盘在目标高度处将电池箱水平推入电池储存机构或者电池仓。
62.每隔预定间隔,进行电池转运托盘倾斜角度自校正步骤,所述倾斜角度自校正步骤包括:
63.图3所示,在更换新能源汽车电池的设备未投入使用时,在电池转运托盘未装载电池的情况下,将电池转运托盘上升至其升降行程的最顶端位置,行走轮带动电池转运托盘移动至校正标尺前方特定距离h处,此时定位感测模块对准定位标尺获得高度a作为目标校准高度;
64.在更换新能源汽车电池的设备使用特定时间后,电池转运托盘未装载电池的情况下,将电池转运托盘上升至其升降行程的最顶端位置,行走轮带动电池转运托盘移动至校正标尺前方特定距离h处,此时定位感测模块对准定位标尺获得高度b作为当前校准高度;
65.利用水平角度微调机构调整电池转运托盘的水平角度,使得定位感测模块对准的定位标尺位置由当前校准高度移动至目标校准高度处,并将当前的电池转运托盘的倾斜角度位置作为校正后的倾斜角度初始位置。
66.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。