监视车辆液罐液位的方法、存储介质、控制单元及scr系统
技术领域
1.本技术涉及一种用于监视车辆尤其是柴油车的液罐中、尤其是尾气处理液罐中的液位的技术。
背景技术:
2.车辆的发动机在运行时会产生具有较高含量的氮氧化物的尾气,这种尾气不能直接排放到大气中,而是需要通过选择性催化还原(scr)系统进行处理之后才能排放到大气中。对于柴油车而言,对发动机排放的尾气进行处理的一种有效技术是采用scr方法来降低尾气中氮氧化物的含量。scr方法通过在scr系统中使用尾气处理液(通常是尿素水溶液)来对尾气进行处理,使尾气中有害的氮氧化物转化为无害的氮气和水蒸气,以减少发动机有害气体排放。
3.scr系统通常包括用于容纳尾气处理液的液罐、用于向排气管中喷射尾气处理液的喷射装置以及用于从液罐抽取尾气处理液并将其加压供应到喷射装置的输送装置。液罐内布置有超声波传感器,以用于检测尾气处理液的液位。这种超声波传感器借助尾气处理液与其上方的空气之间的界面实现液位测量。然而,当液罐中被过度充填尾气处理液时,液罐中的空气被全部挤出,不存在尾气处理液与空气之间的界面,没有超声波被反射回超声波传感器,因而超声波传感器检测不到液位。此外,当液罐中的尾气处理液被过度消耗或者排空时,液位会降到超声波传感器的超声波发射部位的下方,超声波传感器也检测不到液位。仅使用这种液位传感器无法判断液罐是否被排空。
技术实现要素:
4.考虑到上面描述的问题,本技术旨在提供一种用于监视车辆尤其是柴油车的液罐中、尤其是尾气处理液罐中的液位的方法,以可靠地判断液罐是否被排空。
5.根据本技术的一个方面,提供了一种一种用于监视车辆液罐中的液位的方法,所述液罐具有安装在所述液罐的底部的第一超声波传感器和第二超声波传感器,所述第一超声波传感器用于通过朝着所述液罐的顶部发射超声波并且接收回波信号来检测所述液罐中的液位,所述第二超声波传感器用于通过沿着所述底部发射超声波并且接收回波信号来判断在所述第一超声波传感器的超声波发射部位的下方是否存在液体,所述方法包括以下步骤:
6.使所述第一超声波传感器发射超声波并且接收第一回波信号,以检测所述液罐中的液位;
7.当所述第一超声波传感器没有接收到所述第一回波信号持续一段时间时,使所述第二超声波传感器发射超声波并且接收第二回波信号;
8.基于所述第二回波信号判断所述液罐是否为空罐。
9.根据本技术的另一方面,提供了一种机器可读的非易失性存储介质,在所述机器可读的非易失性存储介质上存储有实施前述方法的程序指令。
10.根据本技术的又一方面,提供了一种控制单元,所述控制单元具有存储器和处理器,所述存储器存储有可执行的程序指令,当所述程序指令被执行时导致所述处理器实施前述方法。
11.根据本技术的再一方面,提供了一种车辆scr系统,包括用于容纳尾气处理液的液罐、用于向排气管中喷射尾气处理液的喷射装置、用于从液罐抽取尾气处理液并将其加压供应到喷射装置的输送装置以及前述控制单元。
12.本技术的用于监视车辆尤其是柴油车的液罐中、尤其是尾气处理液罐中的液位的方法能够在超声波液位传感器检测不到液罐的液位时判断液罐是否被排空。此外,上述方法还能够可靠地判断液罐处于以下哪种充液状况:1)液罐为空罐;2)液罐被过度充填;3)液罐中的液位降到了超声波液位传感器的超声波发射部位的下方,从而针对不同的充液状况作出不同的反应,保证车辆系统的正常运行。
附图说明
13.下面将结合附图来更彻底地理解并认识本技术的上述和其它方面。应当注意的是,附图仅为示意性的,并非按比例绘制。在附图中:
14.图1是根据本技术优选实施例的scr系统的示意图;以及
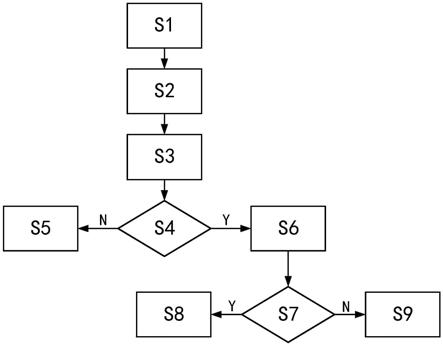
15.图2是根据本技术优选实施例的用于监视液罐液位的方法的流程图。
具体实施方式
16.下面结合示例详细描述本技术的优选实施例。本领域技术人员应理解的是,这些示例性实施例并不意味着对本技术形成任何限制。
17.图1示意性地示出了根据本技术优选实施例的用于车辆、尤其是柴油车的尾气scr系统,其与车辆发动机的排气管(未示出)关联,用于向排气管中喷射尾气处理液(通常是尿素水溶液)以降低尾气中氮氧化物的含量。该scr系统可包括用于容纳尾气处理液的液罐1、用于向排气管中喷射尾气处理液的喷射装置3以及用于从液罐1抽取尾气处理液并将其加压供应到喷射装置3的输送装置5。输送装置5可包括供应泵7和倒抽泵9。当scr系统运行时,输送装置5中的供应泵7通过抽吸管路11从液罐1抽取尾气处理液,将其加压并通过供应管路13供应到喷射装置3。随后,喷射装置3将尾气处理液雾化,并定量地喷射到排气管中。在车辆停驶时,输送装置5中的倒抽泵9进行倒抽以使尾气处理液通过回流管路15返回液罐1,以防止尾气处理液在喷射装置3和输送装置5中沉积、结晶等。
18.继续参考图1,scr系统还可包括布置在液罐1内的第一超声波传感器17、加热器19、第二超声波传感器25和反射器27。第一超声波传感器17可用于检测液罐1中的尾气处理液液位。加热器19可用于对液罐1中的尾气处理液进行加热。scr系统还可包括控制单元20,其与液罐1、第一超声波传感器17、加热器19、第二超声波传感器25、喷射装置3、输送装置5和scr系统的其它功能元件关联,以用于控制它们的操作并监视它们的状态。该控制单元20例如可以是车辆的ecu。
19.第一超声波传感器17在液罐1内安装在底部21,并且可用于通过朝着液罐1的顶部23发射超声波并且接收回波信号来检测液罐1中的尾气处理液的液位。具体而言,第一超声波传感器17通过向液罐1中的尾气处理液与上方空气之间的界面发射超声波并且接收由该
界面反射的回波信号来实现液位检测。控制单元20可通过将回波信号与预先确定的参考值进行比较,以确定液罐1中尾气处理液的液位。但是,当液罐1中被过度充填了尾气处理液时,液罐1中的空气被全部挤出,不存在尾气处理液与空气之间的界面,没有超声波被反射回第一超声波传感器17,第一超声波传感器17因而检测不到液位。此外,当液罐1中的尾气处理液被过度消耗或者排空(例如人工排空或者因破损而漏空)时,液位会降到第一超声波传感器17的超声波发射部位的下方,也没有超声波被反射回第一超声波传感器17,第一超声波传感器17因而检测不到液位。仅使用第一超声波传感器17无法判断液罐1是否被排空。换言之,在第一超声波传感器17检测不到液位时,无法判断液罐1是否为空罐。例如,在车辆启动时需要判断液罐1中的充液状况的情况下,如果第一超声波传感器17检测不到液位,无法判断液罐1是否为空罐。在第一超声波传感器17检测不到液位时,判断液罐1是否为空罐。如前所述,导致排空的原因可能是液罐1被人工排空或者因破损而漏空。在这种情况下需要判断液罐1是否为空罐,并且如果确定液罐1为空罐,则需要提醒用户检查液罐的完整性。
20.本技术的控制单元20可在第一超声波传感器17检测不到液位时,判断液罐1是否为空罐(可称为第一种充液状况)。控制单元20在判断液罐1是否处于第一种充液状况时,需要借助第二超声波传感器25。第二超声波传感器25在液罐1内安装在底部21,并且可用于通过沿着液罐1的底部21发射超声波并且接收回波信号来确定在第一超声波传感器17的超声波发射部位的下方是否存在尾气处理液,从而判断液罐1是否为空罐。第二超声波传感器25可被布置在低于第一超声波传感器17的超声波发射部位的位置。优选地,第二超声波传感器25可被布置在液罐1的底部21的最低位置处。反射器27可与第二超声波传感器25彼此面对地布置,并且第二超声波传感器25可用于通过朝着反射器27发射超声波并且接收由该反射器27反射的回波信号来确定在第二超声波传感器25和反射器27之间存在的介质类型(例如气体和/或液体)。具体而言,可以通过回波信号与预先确定的参考值进行比较,判断在第二超声波传感器25和反射器27之间是否存在尾气处理液。这使得能确定在第一超声波传感器17的超声波发射部位的下方是否存在尾气处理液,由此判断液罐1是否处于第一种充液状况,即判断液罐1是否为空罐。在一个示例中,反射器27是从液罐1的底部21延伸的板。在另一个示例中,反射器27可以是从液罐1的侧壁延伸的板。
21.控制单元20在一定时间段(例如大约300秒,但也可以多于300秒或少于300秒)内发现第一超声波传感器17检测不到液位时,启动第二超声波传感器25,使其朝着反射器27发射超声波并且接收回波信号,以便判断液罐1是否处于第一种充液状况。具体而言,可以通过将第二超声波传感器25的回波信号与预先确定的参考值进行比较,以判断在第一超声波传感器17的超声波发射部位的下方是否存在尾气处理液。当确定在第一超声波传感器17的超声波发射部位的下方没有尾气处理液时,可以确定液罐1处于第一种充液状况,即液罐1为空罐。但是,如果确定在第一超声波传感器17的超声波发射部位的下方存在尾气处理液,则存在两种可能的状况:1)液罐1被过度充填(可称为第二种充液状况);或者2)液罐1中的液位降到了第一超声波传感器17的超声波发射部位的下方但未被排空(可称为第三种充液状况)。
22.在这种情况下,控制单元20需要借助加热器19的操作来进一步判断液罐1处于第二种充液状况或者第三种充液状况。具体而言,加热器19在周围存在尾气处理液和不存在尾气处理液时的工作(加热)状态不同,尤其是具有不同的温升速度、工作电流等。例如,在
加热器19周围存在尾气处理液时,加热器19的温升速度较慢(稳定加热),而在加热器19周围不存在尾气处理液时,加热器19的温升速度急剧加快(非稳定加热)。
23.加热器19例如可以是ptc(正温度系数)加热器,其加热元件由ptc材料制成,该材料的电阻随温度升高。采用这种材料的情况下,当尾气处理液升高到一定温度后,加热元件的电阻升高而电流减小,使得加热器19的功率降低,从而避免尾气处理液被过度加热,因此加热器19具有自限温功能。在加热器19周围不存在尾气处理液时,ptc加热器19的温升速度会非常快,并且工作电流快速下降。
24.控制单元20根据加热器19的加热状态判断液罐1处于第二种充液状况或者第三种充液状况。为此,加热器19被布置在高于第一超声波传感器17的超声波发射部位的位置。例如,加热器19安装在液罐1的侧壁上。
25.控制单元20在需要进一步判断液罐1处于第二种充液状况或者第三种充液状况,即控制单元20在通过第一超声波传感器17检测不到液位并且通过第二超声波传感器25确定在第一超声波传感器17的超声波发射部位的下方存在尾气处理液时,启动加热器19或维持加热器19的加热状态,并监控加热器19的加热状态,以便判断液罐1处于第二种充液状况或者第三种充液状况。具体而言,在控制单元20检测到加热器19稳定加热的状况下,可确定液罐1处于第二种充液状况,而在非稳定加热的状况下,可确定液罐1处于第三种充液状况。例如,在加热器19稳定加热的状况下,加热器19温升正常,由此可确定在第一超声波传感器17的超声波发射部位的上方也存在尾气处理液液位,因而确定液罐1被过度充填(第二种充液状况)。而在加热器19非稳定加热的状况下,加热器19温升过快,由此可确定液罐1中的液位降到了第一超声波传感器17的超声波发射部位的下方但未被排空(第三种充液状况)。在加热器19为ptc加热器的情况下,控制单元20检测加热器19的工作电流,如果工作电流的下降速度正常,则说明加热器19稳定加热,可确定液罐1处于第二种充液状况,而在检测到加热器19工作电流的下降速度过快或是变为低于一预定的最小电流值的情况下,说明加热器19非稳定加热,可确定液罐1处于第三种充液状况。
26.在控制单元20确定液罐1处于第一种液位状况,即液罐1为空罐时,控制单元20可发出警报以提醒用户检查液罐1。对于有自动充液功能的scr系统,控制单元20可以临时禁用该功能。如果用户检查液罐1完好,则可以再次启用自动充液功能或进行手动充液;如果用户发现液罐1破损,则需要更换整个液罐1。在控制单元20确定液罐1处于第二种液位状况,即液罐1被过度充填时,控制单元20可以提醒用户液罐1中有充足的尾气处理液可用并且维持加热器19的加热状态(例如,在温度较低时)。在控制单元20确定液罐1处于第三种液位状况,即液罐1中的液位降到了第一超声波传感器17的超声波发射部位的下方但未被排空时,控制单元20可关闭加热器19,并且可发出警报以提醒用户向液罐1中补充尾气处理液。对于有自动充液功能的scr系统,控制单元20可启动液罐1的充液操作。
27.本技术的scr系统能够在第一超声波传感器17检测不到液罐1的液位时可靠地判断液罐1是否被排空。此外,上述技术能够可靠地判断液罐1处于以下哪种充液状况:1)液罐1为空罐;2)液罐1被过度充填;3)液罐1中的液位降到了第一超声波传感器17的超声波发射部位的下方,从而针对不同的充液状况作出不同的反应,保证车辆系统的正常运行。
28.可以理解,在本技术的范围内,本领域技术人员可以对前面描述的scr系统、尤其是控制单元20的结构和功能做出各种修改。另外,在其它部分实施例中,当在第二超声波传
感器25和反射器27之间存在尾气处理液时,还可以根据第二超声波传感器25的回波信号进一步确定尾气处理液的浓度。
29.本技术还涉及一种用于监视液罐中的液位的方法,可选地,该方法能够应用于前面描述的scr系统中、并且可借助前面描述的控制单元20实施。所述方法的一种可行流程在图2中示意性展示。
30.如图2所示,在步骤s1,使第一超声波传感器17朝着液罐1的顶部23发射超声波并且接收第一回波信号,以检测液罐1中的液位。
31.接下来,在步骤s2,确定第一超声波传感器17在一段时间(例如大约300秒)内没有接收到第一回波信号。
32.接下来,在步骤s3,使第二超声波传感器25沿着液罐1的底部21发射超声波并且接收第二回波信号。
33.接下来,在步骤s4,基于第二回波信号判断在第一超声波传感器17的超声波发射部位的下方是否存在尾气处理液,以判断液罐1是否为空罐。
34.如果在步骤s4中确定在第一超声波传感器17的超声波发射部位的下方没有尾气处理液,可确定液罐1为空罐,则转到步骤s5。
35.在步骤s5,发出警报以提醒用户检查液罐1。
36.另一方面,如果在步骤s4中确定在第一超声波传感器17的超声波发射部位的下方存在尾气处理液,可确定液罐1未被排空,则转到步骤s6。
37.在步骤s6,启动液罐1中的加热器19或维持加热器19的加热状态,并且监视加热器19的加热状态。
38.接下来,在步骤s7,判断加热器19的加热状态是否处于稳定加热。例如,通过加热器19的温升速度是否超出预定的温升速度、加热器19的工作电流下降速度是否超出了预定的电流下降速度、或者加热器19的工作电流值是否低于预定的最小电流值实现判断。
39.如果在步骤s7中确定加热器19的工作状态处于稳定加热(例如,温升速度未超出预定的温升速度,工作电流下降速度未超出预定的电流下降速度,或者加热器的工作电流值不低于预定的最小电流值),可确定液罐1被过度充填,则转到步骤s8。
40.在步骤s8,提醒用户液罐1中有充足的尾气处理液可用,并且可以维持加热器19的加热状态(例如,在温度较低时)。
41.另一方面,如果在步骤s7中确定加热器19的工作状态处于非稳定加热(例如,温升速度超出了预定的温升速度,工作电流下降速度超出了预定的电流下降速度,或者加热器19的工作电流值低于预定的最小电流值),可确定液罐1中的液位降到了第一超声波传感器17的超声波发射部位的下方但未被排空,则转到步骤s9。
42.在步骤s9,关闭加热器19,并发出警报以提醒用户向液罐1中补充尾气处理液。对于有自动充液功能的scr系统,可启动液罐1的充液操作。
43.另外,为了避免误测,还可以在执行步骤s1至s9之前执行其它步骤。例如,在执行步骤s1至s9之前检查第一超声波传感器17、第二超声波传感器25和加热器19是否通电和/或是否报错。另外,当液罐1中的液体由于低温而凝固(例如,尿素水溶液的凝固点为-11℃)时,第一超声波传感器17也无法检测到液位。因此,可以在执行步骤s1至s9之前检测液罐1中的温度。如果液罐1中的温度低于凝固点,则可以先启动加热器19加热,随后执行步骤s1
至s9。
44.应进一步理解到,如图2所示的方法可以是可执行的程序指令,所述可执行的程序指令被存储在机器可读的非易失性存储介质上。还应理解到,控制单元20可以具有存储器和处理器,其中,所述存储器可以存储有可执行的程序指令,当所述程序指令被执行时导致所述处理器实施如图2所示的方法。
45.需要指出,前面描述了用于车辆、尤其是柴油车的尾气scr系统、其控制单元及相关方法,其能够在超声波液位传感器检测不到液罐的液位时判断液罐1是否被排空。此外,上述技术能够可靠地判断液罐1处于以下哪种充液状况:1)液罐1为空罐;2)液罐1被过度充填;3)液罐1中的液位降到了超声波液位传感器的超声波发射部位的下方,从而针对不同的充液状况作出不同的反应,保证车辆系统的正常运行。因此,本技术的范围覆盖基于车辆液罐中的超声波传感器以及可能的加热器确定充液状况的各种场合。
46.还应理解到,第一超声波传感器17和第二超声波传感器25可以是同一传感器。在这种情况下,可以利用超声波转向器使该传感器同时实现第一超声波传感器17和第二超声波传感器25的功能。
47.以上结合具体实施例对本技术进行了详细描述。显然,以上描述以及在附图中示出的实施例均应被理解为是示例性的,而不构成对本技术的限制。对于本领域技术人员而言,可以在不脱离本技术的精神的情况下对其进行各种变型或修改,这些变型或修改均不脱离本技术的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。