1.本发明涉及一种即使在用于检测绝对转向角的2个相对转向角检测部中的一个失效的情况下,也能够基于由另一个相对转向角检测部检测到的相对转向角来求出绝对转向角的转向角检测装置。
背景技术:
2.众所周知,测量方向盘的轮胎转向角的转向角传感器,例如,如专利文献1(日本特开2006
‑
322794号公报)所公开的那样,具有检测相对转向角的2个相对转向角检测部,并从由这2个相对转向角检测部检测到的不同相位的相对转向角的差检测绝对转向角,向各系统输出该信号。
3.因此,由于在一个相对转向角检测部失效的情况下无法检测出绝对转向角,所以变得无法输出表示该绝对转向角的信号。其结果导致以利用该绝对转向角来辅助驾驶员的驾驶操作的vdc(vehicle dynamics control,车辆动态控制)控制为代表的驾驶辅助控制系统停止。
4.现有技术文献
5.专利文献
6.专利文献1:日本特开2006
‑
322794号公报
技术实现要素:
7.技术问题
8.但是,如果在设置于转向角传感器的2个相对转向角检测部中的一个失效的情况下,立即停止输出表示绝对转向角的信号,则变得无法测量方向盘的轮胎转向角(实际转向角)。其结果变得无法进行基于驾驶辅助控制系统的驾驶员的驾驶辅助。
9.因此,以往使用2个转向角传感器来构建冗余系统,即使一个转向角传感器失效,也能够利用另一个转向角传感器检测出绝对转向角,来继续驾驶辅助控制。但是,安装2个转向角传感器存在成本变高的不良情况。
10.本发明鉴于上述情况,其目的在于提供一种不利用2个转向角传感器构建冗余系统,而谋求降低成本,并且即使在设置于转向角传感器的2个相对转向角检测部中的一个失效的情况下,也能够求出绝对转向角,从而能够继续驾驶辅助的转向角检测装置。
11.技术方案
12.本发明在具备具有利用不同的相位从转向轴的旋转检测相对转向角的2个相对转向角检测部和从由所述2个相对转向角检测部分别检测到的所述相对转向角的相位差求出绝对转向角的绝对转向角运算部的转向角传感器、以及检查是否从所述绝对转向角运算部输出有表示绝对转向角的角度信号的诊断部的转向角检测装置中,所述诊断部具备:绝对转向角保持部,其保持最新的所述绝对转向角;相对转向角输出检测部,其在判定为未从所述绝对转向角运算部输出表示所述绝对转向角的角度信号的情况下,检查从所述2个相对
转向角检测部中的哪一个输出有所述相对转向角;以及失效时绝对转向角计算部,其在由所述相对转向角输出检测部判定为从所述2个相对转向角检测部中的一个输出有所述相对转向角的情况下,将输出的该相对转向角与保持在所述绝对转向角保持部的最新的所述绝对转向角相加而更新最新的所述绝对转向角。
13.发明效果
14.根据本发明,在判定为未从转向角传感器的绝对转向角运算部输出表示绝对转向角的角度信号的情况下,将从2个相对转向角检测部中的一个输出的相对转向角与最新的绝对转向角相加来更新该最新的绝对转向角,因此,即使在设置于转向角传感器的2个相对转向角检测部中的一个失效的情况下,也能够求出绝对转向角。其结果是能够使驾驶辅助继续进行,并且无需利用2个转向角传感器构建冗余系统,而能够谋求降低成本。
附图说明
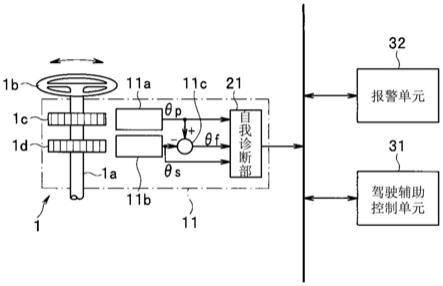
15.图1示出第一实施方式,图1a是具有转向角检测装置的驾驶辅助控制系统的主要部分构成图,图1b是示出根据2个相对转向角的相位差来运算绝对转向角的方式的说明图。
16.图2示出第一实施方式,是示出自我诊断例程的流程图。
17.图3示出第一实施方式,是示出传感器失效时绝对转向角运算例程的流程图。
18.图4是具有第二实施方式的转向角检测装置的驾驶辅助控制系统的主要部分构成图。
19.符号说明
20.1:电动助力转向装置(eps)
21.1a:转向轴
22.1b:方向盘
23.1c:主齿轮
24.1d:副齿轮
25.11:转向角传感器
26.11a:主检测部
27.11b:副检测部
28.11c:绝对转向角运算部
29.11d:接口电路
30.21、31a:自我诊断部
31.31:驾驶辅助控制单元
32.32:报警单元
33.fθp:主失效判定标志
34.fθs:副失效判定标志
35.θf:绝对转向角
36.θp:主转向角
37.θs:副转向角
具体实施方式
38.以下,基于附图对本发明的一个实施方式进行说明。
39.[第一实施方式]
[0040]
图1~图3示出本发明的第一实施方式。图1a的符号1是电动助力转向(eps:electric power steering)装置的主要部分,在转向轴1a的基端固定设置有驾驶员操作的方向盘1b。应予说明,虽未图示,但是在转向轴1a的前端连接设置有具有齿轮&齿条式的转向齿轮机构的转向齿轮箱、以及电动马达。
[0041]
在该转向轴1a设置有形成为圆环状的主齿轮1c和副齿轮1d的轴心。这两个齿轮1c、1d是后述的转向角传感器11的构成要素,并被配置于彼此接近的位置。进一步地,在该各齿轮1c、1d的外周形成有目标齿。对于该各目标齿的齿数而言,在本实施方式中在将主齿轮1c的齿数设为n的情况下,副齿轮1d的齿数设定为少1个(n
‑
1)。
[0042]
此外,作为转向角传感器11的构成要素的主检测部11a和副检测部11b接近该各齿轮1c、1d。这两个检测部11a、11b是与各齿轮1c、1d的目标齿面对,而分别检测旋转角的检测部,并与本发明的相对转向角检测部对应。进一步地,在该转向角传感器11设置有绝对转向角运算部11c和自我诊断部21。
[0043]
此外,该自我诊断部21和作为驾驶辅助控制部的驾驶辅助控制单元31以及报警单元32通过车内通信线路(例如can:controller area network,控制器局域网)以自由双向通信的方式连接。应予说明,自我诊断部21、各单元31、32由具备cpu、ram、rom、非易失性存储部等的公知的集成电路以及其周边设备构成,并在rom预先存储有由cpu执行的程序和/或表、映射等固定数据等。
[0044]
该驾驶辅助控制单元31是辅助驾驶本车辆的驾驶员的驾驶操作的单元,作为代表性的控制,已知有抑制车辆的侧滑而谋求本车辆的行驶稳定性的vdc(vehicle dynamics controller,车辆动态控制)控制。此外,报警单元32是针对驾驶员以视觉的(警告灯、监视器)、或者听觉的(扬声器)方式通知报警的单元。
[0045]
如果转向轴1a旋转,则伴随于此,转向角传感器11的主齿轮1c和副齿轮1d一体旋转。各检测部11a、11b以磁性或光学的方式检测形成于齿轮1c、1d的目标齿的通过,其波形(正弦波的输出波形)如图1b所示以预定方式进行波形整形,并作为表示相对转向角即主转向角θp和副转向角θs的角度信号而输出。
[0046]
此外,在本实施方式中,在将形成于主齿轮1c的目标齿的齿数设为n的情况下,形成于副齿轮1d的目标齿的齿数被设定为(n
‑
1)。因此,在主检测部11a中以360[deg]/n的相位检测主转向角θp。相对于此,副检测部11b以360[deg]/(n
‑
1)的相位检测副转向角θs。
[0047]
然后,绝对转向角运算部11c根据从各检测部11a、11b所输出的转向角θp、θs的相位差求出以转向轴1a的中立点为基准的绝对转向角θf。
[0048]
在自我诊断部21接收表示相对转向角的转向角θp、θs和绝对转向角θf。然后,自我诊断部21监视是否从绝对转向角运算部11c输出有绝对转向角θf,并在输出有绝对转向角θf的情况下,判定为正常,并将该绝对转向角θf直接输入到驾驶辅助控制单元31等。
[0049]
另一方面,在自我诊断部21判定为未从绝对转向角运算部11c输出绝对转向角θf的情况下,且检测出任一个转向角θp、θs的情况下,基于检测出的转向角θp或θs来求出绝对转向角θf。
[0050]
上述的由自我诊断部21执行的自我诊断处理、以及传感器失效时绝对转向角运算处理具体地按照图2所示的自我诊断例程、以及图3所示的传感器失效时绝对转向角运算例程来进行。
[0051]
在图2所示的自我诊断例程中,首先,在步骤s1中,检查是否从绝对转向角运算部11c输出有表示绝对转向角θf的角度信号。然后,在输出有绝对转向角θf的情况下,转向角传感器11判定为正常,并进入步骤s2,输出绝对转向角θf而退出例程。
[0052]
另一方面,在未检测出绝对转向角θf的输出的情况下进入步骤s3,并在步骤s3和步骤s5中,根据主转向角θp和副转向角θs中的哪一个角度信号被输出来检查主检测部11a和副检测部11b中的哪一个失效。
[0053]
然后,在检测出主转向角θp的输出的情况下,判定为副检测部11b失效,并从步骤s3进入步骤s4,将副失效判定标志fθs置位(fθs
←
1),而进入步骤s7。
[0054]
另一方面,在检测出副转向角θs的输出的情况下,判定为主检测部11a失效,并从步骤s5进入步骤s6,将主失效判定标志fθp置位(fθp
←
1),而进入步骤s7。应予说明,两个失效判定标志fθp、fθs的初始值为0。此外,在步骤s3~步骤s6中的处理与本发明的相对转向角输出检测部对应。
[0055]
然后,如果从步骤s4或步骤s6进入步骤s7,则将由绝对转向角运算部11c求出的最新的绝对转向角θf(n
‑
1)保持于ram等存储部。应予说明,符号(n
‑
1)表示前面最近的值。即,在步骤s7中保持的最新的绝对转向角θf(n
‑
1)在执行失效后最初的例程时,成为在前面最近从步骤s2输出的绝对转向角θf。此外,在该步骤s7中保持最新的绝对转向角θf(n
‑
1)的存储部与本发明的绝对转向角保持部对应。此外,在自我诊断部21中,可以无论哪一个检测部11a、11b失效都保持该最新的绝对转向角θf(n
‑
1)而进行更新。
[0056]
接下来,进入步骤s8,输出报警指令而结束例程。报警单元32如果从自我诊断部21接收到报警指令,则驱动警告灯以及监视器和/或扬声器而向驾驶员通知转向角传感器11的失效。应予说明,此时,也可以限制车速的上限。
[0057]
此外,在未检测到两个转向角θp、θs中的任意一个的情况下,判定为转向角故障,并向步骤s9分支,将两个失效判定标志fθp、fθs置位(fθp、fθs
←
1),而进入步骤s10。在步骤s10中,输出故障通知指令而结束例程。
[0058]
报警单元32如果从自我诊断部21接收到故障通知指令,则驱动警告灯、以及监视器和/或扬声器而通知转向角传感器11故障,并且向驾驶员通知与驾驶辅助控制有关的系统停止的信息(故障安全模式)。其结果,在电动助力转向装置中,电动辅助变为0,驾驶员通过机械式进行转向操作。
[0059]
接下来,自我诊断部21执行图3所示的传感器失效时绝对转向角运算例程。在该例程中,首先,在步骤s11中参照主失效判定标志fθp的值来检查主检测部11a是否失效。然后,在fθp=1的失效的情况下进入步骤s12。此外,在fθp=0的正常的情况下向步骤s13分支。
[0060]
如果进入步骤s12,则参照副失效判定标志fθs的值来检查副检测部11b是否失效。然后,在fθs=0的情况下,虽然主检测部11a失效,但是副检测部11b正常,因此,进入步骤s14。此外,在fθs=1的情况下,由于两个检测部11a、11b都失效,所以直接退出例程。
[0061]
另一方面,如果从步骤s11向步骤s13分支,则参照副失效判定标志fθs的值。然后,在fθs=1的情况下,虽然副检测部11b失效,但是主检测部11a正常,因此,进入步骤s15。此
外,在fθs=0的情况下,由于两个检测部11a、11b都正常,所以直接退出例程。
[0062]
如果从步骤s12进入步骤s14,则读取最新的绝对转向角θf(n
‑
1),并将副转向角θs与该最新的绝对转向角θf(n
‑
1)相加来求出失效时的最新的绝对转向角θf(θf
←
θf(n
‑
1) θs),进入步骤s16。另一方面,如果从步骤s13进入步骤s15,则读取最新的绝对转向角θf(n
‑
1),并将主转向角θp与该最新的绝对转向角θf(n
‑
1)相加来求出失效时的最新的绝对转向角θf(θf
←
θf(n
‑
1) θp),进入步骤s16。应予说明,在步骤s14、s15中的处理与本发明的失效时绝对转向角计算部对应。
[0063]
然后,如果进入步骤s16,则输出在步骤s14或步骤s15中求出的绝对转向角θf,并进入步骤s17,利用该绝对转向角θf更新存储部所保持的最新的绝对转向角θf(n
‑
1)(θf(n
‑
1)
←
θf),并退出例程。
[0064]
然而,转向轴1a的旋转方向通过方向盘的转动增加、转动减小而切换。绝对转向角θf通过转动增加而增加,通过转动减小而减小。另一方面,在旋转方向切换时在转向轴1a产生迟滞。
[0065]
由于该迟滞在由正常的检测部(11a或11b)检测到的正弦波的波形表现为延迟,所以通过检测该延迟,从而能够判定由正常的检测部(11a或11b)检测到的转向角(θp或θs)的旋转方向(转动增加、转动减小)。然后,在转动增加方向的情况下对由正常的检测部(11a或11b)检测的转向角(θp或θs)标记正( )的符号,在转动减小方向的情况下对由正常的检测部(11a或11b)检测的转向角(θp或θs)标记负(
‑
)的符号。进一步地,绝对转向角θf也例如将比中立点向左的轮胎转向方向标记为正( )的符号,将比中立点向右的轮胎转向方向标记为负(
‑
)的符号。
[0066]
该绝对转向角θf被例如驾驶辅助控制单元31读取。该驾驶辅助控制单元31利用绝对转向角θf来辅助驾驶本车辆的驾驶员的驾驶操作。
[0067]
如此,在本实施方式中,在设置于转向角传感器11的主检测部11a和副检测部11b中的一个失效的情况下,通过以前面最近的绝对转向角θf为基准,加上由正常的另一个检测部(11a或11b)检测到的相对转向角(θp或θs)而求出绝对转向角θf,从而能够继续驾驶辅助。此外,由于无需利用2个转向角传感器构建冗余系统,所以能够谋求成本的降低。
[0068]
[第二实施方式]
[0069]
图4示出本发明的第二实施方式。在上述的第一实施方式中,利用设置于转向角传感器11的自我诊断部21监视各检测部11a、11b的失效,并在检测到失效的情况下,基于来自正常的检测部(11a或11b)侧的角度信号(θp或θs)来求出绝对转向角θf。
[0070]
与此相对,在本实施方式中,使作为驾驶辅助控制部的驾驶辅助控制单元31中原本具备的自我诊断部31a承担监视设置于转向角传感器11的各检测部11a、11b的失效的功能。
[0071]
该驾驶辅助控制单元31具有vdc控制、abs控制、alk控制、ldp控制等各功能。驾驶辅助控制单元31利用由转向角传感器11检测到的绝对转向角θf来辅助通过上述的各控制功能驾驶本车辆的驾驶员的驾驶操作。
[0072]
这里,vdc(vehicle dynamics control,车辆动态控制)控制是抑制车辆的侧滑而谋求本车辆的行驶稳定性的功能。abs(anti
‑
lock brake system,防抱死制动系统)控制是减小针对存在抱死倾向的车轮的制动压力而避免抱死的功能。alk(active lane keep,主
动车道保持)控制是为了使本车辆沿着行驶车道的中央行驶而进行转向辅助的功能。此外,ldp(lane departure prevention,防止车道偏离)控制是在判定为本车辆存在从行驶车道偏离的倾向的情况下,通过转向干预来抑制本车辆的车道偏离的功能。
[0073]
此外,在转向角传感器11设置有接口电路11d,介由该接口电路11d,由各检测部11a、11b检测到的主转向角θp和副转向角θs、以及绝对转向角θf的各角度信号通过车内通信线路而输出到驾驶辅助控制单元31。
[0074]
在驾驶辅助控制单元31的自我诊断部31a中,在检测到设置于转向角传感器11的检测部11a、11b中的任一个失效的情况下,与第一实施方式同样地,将由正常的检测部11a(或11b)检测到的转向角θp(或者θs)与最新的绝对转向角θf(n
‑
1)相加来求出失效时的最新的绝对转向角θf。
[0075]
驾驶辅助控制单元31在自我诊断部31a检测到两个检测部11a、11b中的任一个失效的情况下,利用由该自我诊断部31a求出的最新的绝对转向角θf来执行上述的各控制功能。
[0076]
应予说明,由自我诊断部31a执行的自我诊断例程、以及传感器失效时绝对转向角运算例程与在上述的第一实施方式中的处理相同,因此省略详细的说明。
[0077]
利用驾驶辅助控制单元31所具备的自我诊断部31a监视来自转向角传感器11的角度信号θp、θs、θf,因此,相应地,能够简化转向角传感器11的部件构成。因此,本实施方式针对不具备自我诊断功能的转向角传感器也能够适用。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。