1.本发明涉及汽车技术领域,尤其涉及一种转向力矩特性调节方法及系统。
背景技术:
2.汽车在行驶过程中,需按驾驶员的意志经常改变其行驶方向,即所谓汽车转向。就轮式汽车而言,实现汽车转向的方法是驾驶员通过一套专设的机构,使汽车转向桥(一般是前桥)上的车轮(转向轮)相对于汽车纵轴线偏转一定角度。
3.随着汽车技术的不断发展,汽车转向系统已经历了机械转向、液压助力转向、电液转向及电动助力转向四个阶段。在电动助力转向阶段,汽车转向系统由机械部分、助力电机及减速机构、控制单元、力矩传感器等组成。该汽车转向系统的工作原理为,首先力矩传感器采集驾驶员转动方向盘的真实转向力矩传递给控制单元;其次,控制单元通过内置的转向助力控制算法根据转向力矩和车速、方向盘转角来计算目标电机力矩,并进一步通过内置的电机控制算法根据目标电机力矩来控制助力电机输出;最后,电机输出的力矩经减速机构施加在转向系统中,并与驾驶员转向力矩叠加来共同克服转向过程产生的阻力,使车辆转向。
4.克服转向阻力所需的驾驶员转向力矩的大小,即汽车的转向力矩特性,是需要在汽车设计开发过程中根据需要调节的,可以根据用户的喜好将转向力矩调大或调小。但是,转向阻力是由车辆本身的动力学特性决定的,而转向力矩特性则取决于电动助力转向系统的设计,因此需要通过助力增大、减小按钮改变电机力矩的系数,对初始电机力矩大小进行调整来达到改变手力的效果。
5.然而,上述对初始电机力矩进行调整的过程中,需要通过直接调节转向助力大小来间接改变转向力矩大小,难以快速得到期望的转向力矩特性,且调节效果依赖于转向助力与转向力矩之间的关系(即转向助力控制算法),一旦该关系发生变化,就需要重新调节参数来保证期望的转向力矩特性相比原特性的关系不变。
技术实现要素:
6.本发明实施例所要解决的技术问题在于,提供一种转向力矩特性调节方法及系统,不仅能快速得到期望的转向力矩特性,而且调节效果不依赖于转向助力与转向力矩之间的关系。
7.为了解决上述技术问题,本发明实施例提供了一种转向力矩特性调节方法,包括以下步骤:
8.电动助力转向控制器采集力矩特性调节信号、驾驶员的实际转向力矩及车辆运行状态信息,根据所述力矩特性调节信号及所述实际转向力矩,得到虚拟转向力矩,将所述虚拟转向力矩与所述车辆运行状态信息结合,通过预设的转向助力控制算法得到电机力矩,进一步将所述电机力矩通过预设的电机控制算法输出给助力电机;
9.所述助力电机根据所述电机力矩控制输出。
10.其中,所述方法进一步包括:
11.所述电动助力转向控制器根据所述虚拟转向力矩及所述实际转向力矩,得到补偿力矩,并将所述补偿力矩对所述电机力矩进行补偿并更新。
12.其中,所述虚拟转向力矩是根据所述力矩特性调节信号及所述实际转向力矩,通过查表或函数公式计算得到的。
13.其中,所述力矩特性调节信号是由驾驶员通过人机界面手动输入形成的,或由车辆控制器根据运行状态自动调节形成的。
14.其中,由驾驶员通过人机界面手动输入形成的力矩特性调节信号和由车辆控制器根据运行状态自动调节形成的力矩特性调节信号各自对应查询所述虚拟转向力矩时的表相异;
15.由驾驶员通过人机界面手动输入形成的力矩特性调节信号和由车辆控制器根据运行状态自动调节形成的力矩特性调节信号各自对应计算所述虚拟转向力矩时的函数公式相异。
16.本发明实施例还提供了一种转向力矩特性调节系统,包括依序相连的力矩传感器、电动助力转向控制器和助力电机;其中,
17.所述力矩传感器,用于采集驾驶员的实际转向力矩给所述电动助力转向控制器;
18.所述电动助力转向控制器,用于采集力矩特性调节信号及车辆运行状态信息,并根据所述力矩特性调节信号及所述实际转向力矩,得到虚拟转向力矩,且将所述虚拟转向力矩与所述车辆运行状态信息结合,通过预设的转向助力控制算法得到电机力矩,进一步将所述电机力矩通过预设的电机控制算法输出所述给助力电机;
19.所述助力电机,用于根据所述电机力矩控制输出,在驾驶员的转向操作过程中提供转向助力。
20.其中,所述电动助力转向控制器包括:
21.转向力矩特性调节器,用于采集力矩特性调节信号,并根据所述力矩特性调节信号及所述实际转向力矩,得到虚拟转向力矩;
22.转向力矩计算模块,用于将所述虚拟转向力矩与所述车辆运行状态信息结合,通过预设的转向助力控制算法得到电机力矩;
23.转向力矩控制模块,用于将所述电机力矩通过预设的电机控制算法输出所述给助力电机。
24.其中,所述电动助力转向控制器还包括:
25.转向力矩补偿模块,用于根据所述虚拟转向力矩及所述实际转向力矩,得到补偿力矩,并将所述补偿力矩对所述电机力矩进行补偿并更新。
26.其中,所述虚拟转向力矩是根据所述力矩特性调节信号及所述实际转向力矩,通过查表或函数公式计算得到的。
27.其中,所述力矩特性调节信号是由驾驶员通过人机界面手动输入形成的,或由车辆控制器根据运行状态自动调节形成的。
28.实施本发明实施例,具有如下有益效果:
29.1、本发明调节直观,直接用函数或映射表定义原转向力矩特性与期望的转向力矩特性的关系,从而能快速得到期望的转向力矩特性;
30.2、本发明无需知道转向助力控制算法的原理和参数,使得调节效果不随转向助力控制算法的变化而变化;
31.3、本发明操纵输入给转向助力控制算法的力矩,以及在其输出上叠加补偿力矩,工作过程中不涉及其内部原理和参数,一旦转向助力控制算法发生变化,仍然能够保证原转向力矩特性与期望的转向力矩特性的关系不受影响(在此过程中,原转向力矩特性本身和新转向力矩特性可能同时发生了变化,但其相对关系是不变的)。
附图说明
32.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,根据这些附图获得其他的附图仍属于本发明的范畴。
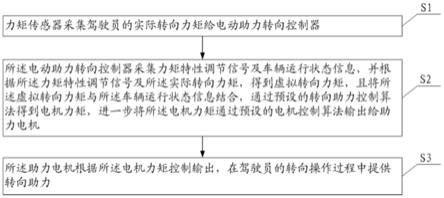
33.图1为本发明实施例提供的转向力矩特性调节方法的流程图;
34.图2为本发明实施例提供的转向力矩特性调节系统的结构示意图。
具体实施方式
35.为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作进一步地详细描述。
36.如图1所示,为本发明实施例中,提供的一种转向力矩特性调节方法,所述方法包括以下步骤:
37.步骤s1、力矩传感器采集驾驶员的实际转向力矩给电动助力转向控制器;
38.步骤s2、所述电动助力转向控制器采集力矩特性调节信号及车辆运行状态信息,并根据所述力矩特性调节信号及所述实际转向力矩,得到虚拟转向力矩,且将所述虚拟转向力矩与所述车辆运行状态信息结合,通过预设的转向助力控制算法得到电机力矩,进一步将所述电机力矩通过预设的电机控制算法输出给助力电机;
39.步骤s3、所述助力电机根据所述电机力矩控制输出,在驾驶员的转向操作过程中提供转向助力。
40.具体过程为,在步骤s1中,力矩传感器采集驾驶员的实际转向力矩。
41.在步骤s2中,首先电动助力转向控制器采集力矩特性调节信号,并根据力矩特性调节信号及实际转向力矩通过查表或函数公式计算得到虚拟转向力矩;其中,力矩特性调节信号是由驾驶员通过人机界面手动输入形成的,或由车辆控制器根据运行状态自动调节形成的。应当说明的是,采集的不同力矩特性调节信号所对应查询的表可相同或可相异,同样采集的不同力矩特性调节信号所对应的函数公式可相同或可相异。例如,由驾驶员通过人机界面手动输入形成的力矩特性调节信号和由车辆控制器根据运行状态自动调节形成的力矩特性调节信号各自对应查询所述虚拟转向力矩时的表及函数公式相异。
42.其次,电动助力转向控制器采集车辆运行状态信息,并将虚拟转向力矩与车辆运行状态信息结合,通过预设的转向助力控制算法,计算得到电机力矩;其中,车辆运行状态信息包括但不限于车速、方向盘转角等。
43.最后,电动助力转向控制器将电机力矩通过预设的电机控制算法输出给助力电
机。
44.可以理解的是,为了降低力矩误差,可以对电机力矩进行补偿更新后,通过预设的电机控制算法输出给助力电机。因此。所述方法进一步包括:
45.电动助力转向控制器根据虚拟转向力矩及实际转向力矩,得到补偿力矩,并将补偿力矩对电机力矩进行补偿并更新,使得助力电机得到补偿更新后的电机力矩;其中,补偿力矩=虚拟转向力矩-实际转向力矩;电机力矩=电机力矩 补偿力矩。
46.在步骤s3中,助力电机根据步骤s2输出的电机力矩控制输出,在驾驶员的转向操作过程中提供转向助力。
47.对本发明实施例中的一种转向力矩特性调节方法的应用场景做进一步说明:
48.首先,完成电动助力转向控制器中转向助力控制算法和电机控制算法,并冻结其内部参数。此时,在电动助力转向控制器不工作的情况(即没有力矩特性调节信号及车辆运行状态信息)下,即t
虚拟
=t
转向
,车辆表现出来的转向力矩特性,称为原状态的转向力矩特性;
49.由于原状态的转向力矩特性可能不能满足所有驾驶员的要求,需要对原状态的转向力矩特性进行调节,使得新的转向力矩特性与原状态符合给定的理想的关系。此时,用g表示该理想的关系(函数或表),即t
转向,新特性
=g(t
转向,原特性
)。例如,转过同样的弯道,侧向加速度为0.2g,原转向力矩为4nm,新转向力矩为3nm,则可以选择用比例关系来定义g,t
转向,新特性
=0.75*t
转向,原特性
。
50.求取g的反函数或逆向表,即f=g-1
;f用于电动助力转向控制器中,将真实转向力矩转化为虚拟转向力矩,t
虚拟
=f(t
转向
)。在上面的例子中,
51.根据步骤s2的逻辑关系,可以得到下式关系:
52.t
阻力
=t
转向,原特性
t
助力
(t
转向,原特性
)=t
转向,原特性
t
助力
(g-1
(t
转向,新特性
))
53.ꢀꢀꢀ
=t
转向,原特性
t
助力
(f(t
转向,新特性
))=t
转向,原特性
t
助力
(t
虚拟
)
54.ꢀꢀꢀ
=t
转向,新特性
t
转向,原特性-t
转向,新特性
t
助力
(t
虚拟
)=t
转向,新特性
t
补偿
t
助力
(t
虚拟
)
55.从上式可以看出,电动助力转向控制器工作的时候,实际上是将原目标电机力矩t
助力
(t
转向,原特性
)用t
补偿
t
助力
(t
虚拟
)取代,在转向阻力t
阻力
不变的情况下,使转向力矩变为了t
转向,新特性
。
56.由于力矩特性调节信号可以是预设不同转向力矩特性模式的选择信号,也可以是函数关系的某个计算参数。也就是说,在车辆运行过程中可以通过力矩特性调节信号对f进行实时调节,在多个或无数个转向力矩特性之间进行切换。
57.由此可见,本发明实施例绕过转向助力控制算法,将其视为黑盒,通过操纵输入给转向助力控制算法的力矩,使其保持原有的输出力矩不变,并在原有输出力矩的基础上叠加补偿力矩,最终使得用期望的转向力矩也可克服原来的转向阻力。
58.如图2所示,为本发明实施例中,提供的一种转向力矩特性调节系统,包括依序相连的力矩传感器110、电动助力转向控制器120和助力电机130;其中,
59.所述力矩传感器110,用于采集驾驶员的实际转向力矩给所述电动助力转向控制器120;
60.所述电动助力转向控制器120,用于采集力矩特性调节信号及车辆运行状态信息,并根据所述力矩特性调节信号及所述实际转向力矩,得到虚拟转向力矩,且将所述虚拟转
向力矩与所述车辆运行状态信息结合,通过预设的转向助力控制算法得到电机力矩,进一步将所述电机力矩通过预设的电机控制算法输出所述给助力电机130;
61.所述助力电机130,用于根据所述电机力矩控制输出,在驾驶员的转向操作过程中提供转向助力。
62.其中,所述电动助力转向控制器120包括:
63.转向力矩特性调节器1201,用于采集力矩特性调节信号,并根据所述力矩特性调节信号及所述实际转向力矩,得到虚拟转向力矩;
64.转向力矩计算模块1202,用于将所述虚拟转向力矩与所述车辆运行状态信息结合,通过预设的转向助力控制算法得到电机力矩;
65.转向力矩控制模块1203,用于将所述电机力矩通过预设的电机控制算法输出所述给助力电机130。
66.其中,所述电动助力转向控制器120还包括:
67.转向力矩补偿模块1204,用于根据所述虚拟转向力矩及所述实际转向力矩,得到补偿力矩,并将所述补偿力矩对所述电机力矩进行补偿并更新。
68.其中,所述虚拟转向力矩是根据所述力矩特性调节信号及所述实际转向力矩,通过查表或函数公式计算得到的。
69.其中,所述力矩特性调节信号是由驾驶员通过人机界面手动输入形成的,或由车辆控制器根据运行状态自动调节形成的。
70.实施本发明实施例,具有如下有益效果:
71.1、本发明调节直观,直接用函数或映射表定义原转向力矩特性与期望的转向力矩特性的关系,从而能快速得到期望的转向力矩特性;
72.2、本发明无需知道转向助力控制算法的原理和参数,使得调节效果不随转向助力控制算法的变化而变化;
73.3、本发明操纵输入给转向助力控制算法的力矩,以及在其输出上叠加补偿力矩,工作过程中不涉及其内部原理和参数,一旦转向助力控制算法发生变化,仍然能够保证原转向力矩特性与期望的转向力矩特性的关系不受影响(在此过程中,原转向力矩特性本身和新转向力矩特性可能同时发生了变化,但其相对关系是不变的)。
74.值得注意的是,上述系统实施例中,所包括的各个系统单元模块只是按照功能逻辑进行划分的,但并不局限于上述的划分,只要能够实现相应的功能即可;另外,各功能单元模块的具体名称也只是为了便于相互区分,并不用于限制本发明的保护范围。
75.本领域普通技术人员可以理解实现上述实施例方法中的全部或部分步骤是可以通过程序来指令相关的硬件来完成,所述的程序可以存储于一计算机可读取存储介质中,所述的存储介质,如rom/ram、磁盘、光盘等。
76.以上所揭露的仅为本发明较佳实施例而已,当然不能以此来限定本发明之权利范围,因此依本发明权利要求所作的等同变化,仍属本发明所涵盖的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
