1.本发明是关于一种锚钉植入系统,尤其指一种用于医疗手术的锚钉植入系统。
背景技术:
2.锚钉为应用于缝合韧带等软组织的手术器材。缝合手术为先利用锚钉将缝线的一端固定于骨骼上,之后以缝线缝合软组织,接着再使用另一锚钉将缝线另一端拉紧、固定。
3.为了将锚钉植入骨骼中,常见的做法为先以另一口径较粗的器械在骨骼上穿凿导孔,其后再将锚钉敲入导孔中。然而,上述的现有做法存在一些问题。
4.首先,随着医疗技术进步,各种新型微创手术纷纷出现,这些微创手术大多以内视镜辅助来进行,使施术医师的视野受到许多限制。因此,在凿孔、植入锚钉为分段执行的情况下,经常发生医师在替换器械后找不到原先凿孔位置的问题。
5.另外,由于锚钉以敲入方式固定,故需要预先凿出较大的导孔,此对骨骼周边组织的破坏程度较大、且锚钉的牢固性也较差。又以手术操作而言,替换器械的步骤亦使得手术变得更加繁琐、耗时。
技术实现要素:
6.为了改善现有技术的上述问题,本发明提出一种锚钉植入系统,其可于一次操作中即完成凿孔、植入锚钉以及固定锚钉的流程。不仅可有效减少手术中的失误机会,更能节省时间、并增进手术的效果。
7.根据本发明的一实施方式,提供一种锚钉植入系统,可供固定于骨骼上,锚钉植入系统包含锚体以及旋刃。锚体具有内侧、外侧以及连通内侧与外侧的穿孔,且锚体包含容置部、螺纹部。容置部设于内侧,而螺纹部设于外侧。旋刃的一端穿设于容置部并自穿孔凸出,且旋刃的横截面为非圆形。旋刃可旋转而驱动锚体,以使锚体通过螺纹部旋入骨骼。
8.由于本实施方式的旋刃的横截面为非圆形,不仅可用于带动锚钉旋转,且非圆形的横截面可使旋刃在旋转时的铣削半径扩大,从而在骨骼上开设足以供螺纹部直接旋入的导孔。如此一来,施术医师可在确定位置后直接将锚钉旋入骨骼,省去先以其他器械凿孔、而后再植入锚钉的麻烦。
9.在其他实施例中,前述旋刃的横截面可以为三角形、四边形、五边形或六边形,但不以此为限。旋刃可具有尖端部,尖端部为锥状而可供敲入骨骼。
10.前述的螺纹部可具有2
°
至4
°
的锥度。在较佳的实施例中,锥度可以为2.5
°
至3.5
°
,最佳为3
°
。前述锚体的材质可以为聚醚醚酮。
11.根据本发明的另一实施方式,提供一种锚钉植入系统,包含前述实施方式的锚体以及旋刃,且另包含一驱动机构。锚体以及旋刃的技术特征如前所述,此处不再重复。驱动机构包含驱动轴以及操作单元。驱动轴连接前述旋刃的另一端,且驱动轴具有一驱动部。操作单元连接驱动轴,并且包含一导引件;导引件连接驱动部以驱动其旋转。当驱动轴被驱动而旋转时,驱动部将受导引件导引,使驱动轴相对锚体轴向地移动。
12.本实施方式的特点在于:旋刃可由另一驱动机构控制而轴向地伸缩。换言之,当需要于骨骼上预先凿孔时,可利用操作单元将旋刃伸长,将旋刃作为凿孔器械来使用。在凿孔完毕后,旋刃即退回初始位置,可和锚体一起旋入骨骼中。
13.通过上述实施方式,本发明亦可结合预先凿孔的手术方式来实施,且同样仅以一次操作即可完成锚钉的植入作业。
14.在前述实施方式中,导引件可以为插销,而驱动部可以为滑槽,滑槽为螺旋状且凹设于驱动轴的表面。此外,驱动轴可具有一限位件,而驱动机构可包含一握持部,握持部为中空壳状而可容纳驱动轴穿入,且握持部具有一限位部与限位件彼此限制,使握持部与驱动轴相对地固定。
15.在限位部与限位件彼此限制时,握持部与驱动轴无法相对旋转。如此,操作者即可握持驱动机构的握持部来操作旋刃,以将锚体旋入骨骼。
16.前述的限位部可以形成于握持部的内壁;限位件可以为一块体,并且可容置于限位部。
17.除此之外,锚体可以开设有一开口,而旋刃则凹设有穿线槽,开口与穿线槽的位置相对应,以供手术缝线经由穿线槽进入、并由开口穿出。
附图说明
18.图1为本发明一实施方式的锚钉植入系统的爆炸视图。
19.图2为图1的锚钉植入系统的锚体的局部剖视图。
20.图3a为图1的锚钉植入系统的组合示意图。
21.图3b为图1的锚钉植入系统的前视图。
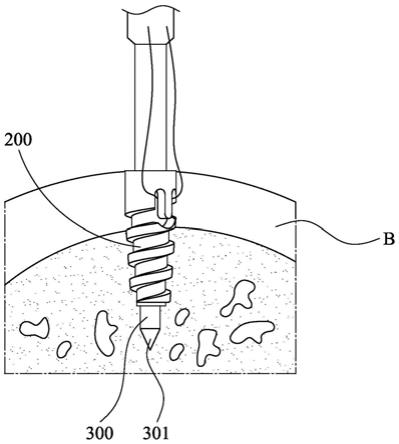
22.图4a至图4d为图1的锚钉植入系统的操作示意图。
23.图5为本发明另一实施方式的锚钉植入系统的爆炸视图。
24.图6a及图6b为图5的锚钉植入系统的操作单元示意图。
25.图6c至图6e为图5的锚钉植入系统的驱动轴示意图。
26.图6f及图6g为图5的锚钉植入系统的旋刃回退示意图。
27.图7a为图5的锚钉植入系统的握持部剖视图。
28.图7b及图7c为图5的锚钉植入系统的旋刃回退示意图。
29.图8a为图5的锚钉植入系统的锚体的开口与旋刃的穿线槽示意图。
30.图8b至图8f为图5的锚钉植入系统的操作示意图。
31.符号说明:
32.100、400
ꢀꢀꢀꢀꢀ
锚钉植入系统
ꢀꢀꢀꢀ
200
ꢀꢀꢀꢀꢀ
锚体
33.201
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
内侧
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
202
ꢀꢀꢀꢀꢀ
外侧
34.203
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
穿孔
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
204
ꢀꢀꢀꢀꢀ
开口
35.210
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
容置部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
220
ꢀꢀꢀꢀꢀ
螺纹部
36.300
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
旋刃
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
301
ꢀꢀꢀꢀꢀ
尖端部
37.302
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
穿线槽
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
500
ꢀꢀꢀꢀꢀ
驱动机构
38.510
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
驱动轴
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
511
ꢀꢀꢀꢀꢀ
驱动部
39.512
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
限位件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
520
ꢀꢀꢀꢀꢀ
操作单元
40.521
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
导引件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
522
ꢀꢀꢀꢀꢀ
连接部
41.530
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
握持部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
531
ꢀꢀꢀꢀꢀ
限位部
42.b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
骨骼
具体实施方式
43.请参照图1及图2,本发明的第一实施方式为提供一种锚钉植入系统100,包含锚体200以及旋刃300。锚体200为薄壳形状而具有内侧201及外侧202,且锚体200的前端开设有连通内侧201与外侧202的穿孔203。锚体200的内侧201为容置部210,用于容纳旋刃300;锚体200的外侧202则设有螺纹部220。
44.配合参照图3a以及图3b,旋刃300穿设于锚体200的容置部210,其前端从穿孔203凸出,且旋刃300的横截面为非圆形。如图3b所示,r为一般器械的切削半径,而√2r则为旋刃300的切削半径。换言之,相较于横截面为圆形的器械,本实施方式的旋刃300切削出的导孔面积可增加一倍。值得一提的是,虽然本实施方式的旋刃300可切削出更大面积的导孔,但旋刃300的宽度仍然仅为2r。因此,锚体200的尺寸不需要随之增大,从而有利于旋入导孔中。
45.另外,虽然此处示范的旋刃300的横截面为正四边形,但此不应构成对本发明的限制。例如,旋刃300的横截面也可以为三角形、五边形、六边形或其他形状。
46.图4a至图4d为显示锚钉植入系统100的操作过程。如图4a所示,医师可直接经由套管(cannula)将锚钉植入系统100伸入手术部位,不须先以其他器械预先凿孔。
47.在图4b中,旋刃300的前端具有锥状的尖端部301,当施术医师决定锚体200的安装位置后,即可将尖端部301直接敲入或旋入骨骼b中。
48.在图4c中,由于旋刃300的横截面为非圆形,因此当医师旋转旋刃300时,可带动锚体200一起旋转,使锚体200通过螺纹部220旋入骨骼b中。
49.在图4d中,在锚体200被旋入至设定的深度后,医师即可将旋刃300抽出,以进行后续的软组织缝合手术。
50.由上述的说明可知,本实施方式的锚钉植入系统100将旋刃300和锚体200加以整合,旋刃300可在凿孔的同时将锚体200旋入骨骼b中。借此,医师不仅可省去预先凿孔的麻烦,且固定锚体200的操作更加简单、锚体200的固定效果也较佳。
51.前述的螺纹部220可具有2
°
至4
°
的锥度。在较佳的实施例中,螺纹部220的锥度可以为2.5
°
至3.5
°
,最佳为3
°
。锚体200的材质可以为聚醚醚酮(peek),或其他与骨骼b兼容性佳的材料。
52.请参照图5,本发明另一实施方式为提供一种锚钉植入系统400,其包含前述的锚钉植入系统100以及驱动机构500。驱动机构500又包含驱动轴510以及操作单元520。驱动轴510连接前述锚钉植入系统100的旋刃300的另一端,而操作单元520则连接驱动轴510。
53.请参照图6a至图6c,驱动轴510具有驱动部511,驱动部511为螺旋状的滑槽,并且凹设于驱动轴510的表面。继续参照图6d以及图6e,操作单元520包含导引件521,其为一固定于操作单元520上的插销。如图6e所示,导引件521的一部份穿入位于操作单元520内壁的连接部522。
54.再参照图6f,驱动轴510插置于操作单元520的连接部522,且驱动部511和导引件
521连接。当操作单元520旋转时,驱动部511受导引件521导引,使驱动轴510一起旋转。此外,由于驱动部511为螺旋状的沟槽,故驱动轴510在转动时亦相对锚体200轴向地移动。如图6g所示,当导引件521的位置对应于驱动部511的另一端时,驱动轴510即移动至连接部522的底部。同时,与驱动轴510连接的旋刃300亦将相对锚体200回缩。
55.借此,本实施例可利用旋刃300在骨骼b上预先凿孔,其后利用操作单元520将旋刃300退回初始位置,接着继续旋转旋刃300,即可将锚体200旋入骨骼b中。
56.请参照图7a至图7c,图7a示意驱动机构500更可包含握持部530。握持部530为中空壳状而可容纳驱动轴510,握持部530又包含限位部531。如图7b与图7c所示,驱动轴510具有限位件512,且驱动轴510连接操作单元520,操作单元520邻接于握持部530。在本实施例中,限位件512为一块体,而限位部531为形成于握持部530的内壁的容室。
57.在图7b与图7c中,限位件512为一长方体,而限位部531恰可容纳限位件512,故限位件512与限位部531为彼此限制,使握持部530、操作单元520与驱动轴510相对地固定。因此,当操作单元520或是握持部530被旋转时,驱动轴510皆会被驱动旋转。在此过程中,限位件512会相对限位部531线性地移动。
58.如图7c所示,当旋刃300退回至适当的位置后,医师可继续旋转操作单元520或握持部530来将锚体200植入骨骼b中。
59.需特别说明的是,握持部530仅是提供操作者如同使用手工具般的便利性,但其并非实施本发明所必要。在不具有握持部530的前提之下,操作者仍然可以仅凭借操作单元520来旋转驱动轴510、并将锚体200旋入骨骼b。
60.同理,限位件512和限位部531的具体态样也可以加以变化,只要两者可达到限制彼此旋转的功能,皆可适用于本发明。
61.请继续参照图8a,在其他实施例中,锚体200可以具有开口204、而旋刃300可设有穿线槽302,开口204与穿线槽302的位置相对应而可供缝线通过。
62.参照图8b及图8c,与前述第一实施方式的说明相同,锚钉植入系统400可以直接伸入套管(cannula)来植入锚体200,不须先以其他器械预先在骨骼b上凿孔。在决定锚体200的植入位置后,即可将旋刃300敲入骨骼b中。由于旋刃300的横截面为非圆形,故旋刃300旋转时会进一步切削骨骼b,进而扩大导孔的孔径。
63.参照图8d,当医师旋转操作单元520时,导引件521带动驱动部511,使驱动轴510和旋刃300轴向地回退。
64.继续参照图8e,在旋刃300回退的状态下,医师可继续旋转操作单元520或是握持部530,将旋刃300和锚体200一并旋入骨骼b中。值得一提的是,由于旋刃300为在锚体200植入之前即已回退,故而避免了缝线在海绵骨组织(spongy bone)内和旋刃300缠绕的问题。因此,当锚体200旋入至适当的深度后,旋刃300即可顺畅地自锚体200抽出。
65.如图8f所示,当锚体200被旋入骨骼b的同时,螺纹部220和骨骼b之间的缝线亦被绞紧,即可完成软组织的缝合手术。
66.由上述实施例可知,本发明至少包含以下有益效果。第一,本发明利用截面为非圆形的旋刃来扩大导孔的面积,使锚钉可轻易的旋入骨骼,同时具有良好的固定效果。第二,本发明将旋刃与锚钉结合,仅单一操作步骤即可完成锚钉的植入,不仅节省时间,也降低手术的难度。第三,搭配驱动机构,本发明亦可支持预先凿孔的处置,且同样不需要在凿孔后
替换器械,兼顾安全性与效率。
67.本发明于上文中已以较佳实施例揭露,然熟悉本项技术者应理解的是,该实施例仅用于描绘本发明,而不应解读为限制本发明的范围。举凡与上述实施例所揭的等效变化或置换,均应视为涵盖于本发明的范畴内。因此,本发明的保护范围当以权利要求所界定者为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。