1.本发明涉及水质监测技术领域,具体的,涉及城市河道水连续在线实时采集监测系统。
背景技术:
2.随着社会经济发展、科学进步和人民生活水平的提高,人们对生活饮用水的水质要求不断提高,对水源水质的监测手段也相应地不断发展和完善。另外,从保护自然生态的角度来说,也要加强城市河道水质监测,防范治理污染物排放。
3.传统的水质监测一般是在水边定点进行取样监测,而城市河道流域污染源主要以生活污水为主,水质随着居民生产生活、天气变化而随时动态变化,其排污特点主要是小规模、随意性、突发性、流动性和扩散性等特点,相对独立的单点监测效果难以准确确定排污的时间、总量、对水体的影响等,导致不能及时全面的发现水质污染状况。因此,能够移动检测的水质实时监测处理系统成为认为研究的重点,但是现有的水质实时监测处理系统在进行水质采集时对不同深度和表面的污染源采集都无法实现变量唯一,导致其治理的有效性还有待提高。
技术实现要素:
4.本发明提出城市河道水连续在线实时采集监测系统,解决了相关技术中城市河道水连续在线实时采集监测系统治理效果差的问题。
5.本发明的技术方案如下:包括与服务器通信连接的多个巡逻船,还包括:停靠舱,所述停靠舱为多个,多个所述停靠舱沿河道间隔设置,所述停靠舱内设置有位置检测模块,每个所述巡逻船移动设置在相邻的两个停靠舱之间,所述巡逻船包括与第一控制器连接的无线通信模块,所述无线通信模块与所述服务器连接,所述巡逻船的底部沿竖直方向设置有第一安装孔,所述第一安装孔内移动设置有第一传感器单元,所述巡逻船内还设置有采样管道,所述采样管道与所述第一安装孔的侧壁连通,所述采样管道与采样装置连接,所述采样管道入口处设置有电磁阀,所述电磁阀与所述第一控制器连接,所述巡逻船的前端沿水平方向设置有第二安装孔,所述第二安装孔内设置第二传感器单元。
6.进一步,所述第一传感器单元包括ph传感器。
7.进一步,所述第一传感器单元还包括浊度传感器。
8.进一步,所述第一传感器单元借助伸缩机构移动设置在所述巡逻船的前端,所述伸缩机构包括:第一电机,固定设置在所述巡逻船内;第一丝杆,设置在所述第一电机的输出端,所述第一丝杆从上到下依次设置有第
一光轴段、螺纹段和第二光轴段,所述第一光轴段和所述第二光轴段均为光轴,所述螺纹段外壁设置有螺纹;内管,套设在所述第一丝杆外侧,所述第一传感器单元设置在所述内管的下端,当所述第一传感器单元位于行程内的最高点时,所述内管的上端与所述螺纹段的上端啮合;所述内管的外壁设置有第一凸起;外管,套设在所述内管外侧,所述外管的内壁沿轴向设置有第一导槽,所述第一凸起移动设置在所述第一导槽内;所述外管的内壁同轴设置有第一丝母,所述外管的外壁设置有锁紧件,当所述第一传感器单元位于行程内的最高点时,所述锁紧件将所述外管锁定在所述巡逻船的内壁,所述第一丝母套设在所述第一光轴段的外侧;所述外管的外壁设置有第二凸起;所述第一安装孔的内壁设置有第二导槽,所述第二凸起移动设置在所述第二导槽内,所述第一导槽和所述第二导槽的下端均设置有挡部。
9.进一步,所述锁紧件为定位弹簧销,所述外管的外壁沿径向设置有第三安装孔,所述定位弹簧销设置在所述第三安装孔内,所述第一安装孔的内壁设置有定位孔,当所述第一传感器单元位于行程内的最高点时,所述定位弹簧销的一端位于所述第三安装孔内,另一端位于所述定位孔内。
10.进一步,所述巡逻船的前端设置有第二安装孔,所述第二传感器单元包括:安装盘,设置在所述第二安装孔内,所述安装盘的轴线与所述第二安装孔的轴线平行;水质传感器,所述水质传感器包括cod传感器、氨氮传感器和orp传感器,多个所述水质传感器沿周向设置在所述安装盘上,且多个所述传感器的轴线均与所述安装盘的轴线平行。
11.进一步,还包括:第二电机,设置在所述安装盘上,所述第二电机输出轴的轴线与所述安装盘的轴线平行;清洗刷, 所述清洗刷的第一端与所述第二电机的输出端连接,其中两个所述水质传感器之间设置有停止位,所述停止位用于设置所述清洗刷的第二端。
12.进一步,所述巡逻船内还设置有gps定位模块、uwb定位模块和气象检测模块,所述停靠舱内还设置有与第二控制器连接的无线充电模块,所述第二控制器还与液位传感器连接,所述停靠舱的下侧设置有底板,所述底板借助升降机构沿竖直方向移动。
13.进一步,所述底板上设置有漏水孔。
14.进一步,所述升降机构包括:第二丝母,与所述底板连接;第二丝杆,与动力机构连接,所述第二丝杆与所述第二丝母啮合;导向板,固定设置在河道侧壁;连接杆,所述连接杆为对称设置的两个, 所述连接杆的第一端与所述第二丝母连接,所述连接杆的第二端设置有两个滚轮,两个滚轮分别设置在所述导向板沿厚度方向的两侧,所述滚轮沿所述导向板的高度方向滚动。
15.进一步,所述连接杆的第二端设置有第四安装孔,所述滚轮的转轴穿过所述第四安装孔,并通过螺母锁紧。
16.进一步,所述第四安装孔为条形孔,且所述第四安装孔的长度方向与所述导向板的厚度方向平行。
17.进一步,所述动力机构包括:第三电机,固定设置在所述停靠舱内;主动轮,设置在所述第三电机的输出端;从动轮,通过皮带与所述主动轮连接,所述从动轮套设在所述第二丝杆的上端。
18.进一步,还包括与所述导向板固定连接的加强板,所述第二丝杆的下端转动设置在所述加强板上。
19.本发明的工作原理及有益效果为:本发明中多个巡逻船对河道进行分段监测,每个巡逻船在两个停靠舱之间往返移动,用于实时采集所在河道段的水质监测数据,多段河道的水质监测数据通过无线通信模块上传至服务器,服务器根据巡逻船上传的数据可以实时了解河道的水质分布情况。其中,第一传感器单元沿竖直方向移动设置在第一安装孔内,在巡逻船行进时,第一传感器单元移动至最高点、位于水面以上,不会增加巡逻船行进时的阻力;当巡逻船到达采集点时,第一传感器单元移动至水下设定深度,进行水下的水质数据采集。在巡逻船行进时,前端会汇集河道上的漂浮物,第二传感器单元设置在巡逻船的前端,用于采集漂浮物的成分。
20.第一安装孔的侧壁还与采样管道连通,可以根据需要打开电磁阀,采集设定位置的水样到采样装置内、带回实验室进一步分析。
21.本发明中多个巡逻船在全城市流域的布置,能够形成监测网络;实现城市河道水污染源的精确采集、位置确定、在线的实时变化;并且能够区分表面漂浮物、水下不同深度的污染物,全面分析污染物的成分,便于进行针对性的治理,有利于提高治理效果。
附图说明
22.下面结合附图和具体实施方式对本发明作进一步详细的说明。
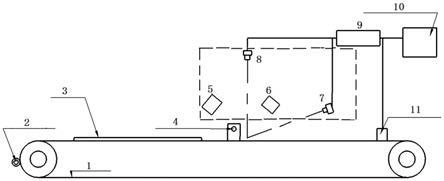
23.图1为本发明中巡逻船整体结构示意图;图2为图1中a处局部放大图;图3为本发明剖面结构示意图;图4为图3中b处局部放大图;图5为本发明中第一丝杆结构示意图;图6为本发明中停靠舱整体结构示意图;图7为本发明中停靠舱内部结构示意图;图8为本发明中停靠舱俯视结构示意图;图9为图8中c处局部放大图;图中:1第一传感器单元,2第二传感器单元,21安装盘,22水质传感器,23第二电机,24清洗刷,3伸缩机构,31第一电机,32第一丝杆,321第一光轴段,322螺纹段,323第二光轴段,33内管,331第一凸起,34外管,341第一导槽,342第一丝母,343第三安装孔,344第二凸起,35锁紧件,4第二导槽,5定位孔,6第二安装孔,7停靠舱,71充电盒,72底板,721漏水孔,73升降机构,731第二丝母,732第二丝杆,733导向板,734连接杆,7341第四安装孔, 735动力机构,7351第三电机,7352主动轮,7353从动轮,736加强板,737滚轮,8第一安装孔,9采
样管道,10采样装置。
具体实施方式
24.下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都涉及本发明保护的范围。
25.如图1
‑
图9所示,包括与服务器通信连接的多个巡逻船,其特征在于,还包括:停靠舱7,停靠舱7为多个,多个停靠舱7沿河道间隔设置,停靠舱7内设置有位置检测模块,每个巡逻船移动设置在相邻的两个停靠舱7之间,巡逻船包括与第一控制器连接的无线通信模块,无线通信模块与服务器连接,巡逻船的底部沿竖直方向设置有第一安装孔8,第一安装孔8内移动设置有第一传感器单元1,巡逻船内还设置有采样管道9,采样管道9与第一安装孔8的侧壁连通,采样管道9与采样装置10连接,采样管道9入口处设置有电磁阀,电磁阀与第一控制器连接,巡逻船的前端沿水平方向设置有第二安装孔6,第二安装孔6内设置第二传感器单元2。
26.本发明中多个巡逻船对河道进行分段监测,每个巡逻船在两个停靠舱之间往返移动,用于实时采集所在河道段的水质监测数据,多段河道的水质监测数据通过无线通信模块上传至服务器,服务器根据巡逻船上传的数据可以实时了解河道的水质分布情况。其中,第一传感器单元沿竖直方向移动设置在第一安装孔内,在巡逻船行进时,第一传感器单元移动至最高点、位于水面以上,不会增加巡逻船行进时的阻力;当巡逻船到达采集点时,第一传感器单元移动至水下设定深度,进行水下的水质数据采集。在巡逻船行进时,前端会汇集河道上的漂浮物,第二传感器单元设置在巡逻船的前端,用于采集漂浮物的成分。
27.第一安装孔的侧壁还与采样管道连通,可以根据需要打开电磁阀,采集设定位置的水样到采样装置10内、带回实验室进一步分析。
28.本发明中多个巡逻船在全城市流域的布置,能够形成监测网络;实现城市河道水污染源的精确采集、位置确定、在线的实时变化;并且能够区分表面漂浮物、水下不同深度的污染物,全面分析污染物的成分,便于进行针对性的治理,有利于提高治理效果。
29.进一步,第一传感器单元1包括ph传感器。
30.进一步,第一传感器单元1还包括浊度传感器、h2s传感器、溶解氧传感器、余氯传感器和氨氮传感器。
31.进一步,第二传感器单元2包括cod传感器、氨氮传感器和orp传感器。
32.第一传感器单元1用于检测ph、h2s、溶解氧、浊度、余氯、氨氮等水质数据,表明水下不同深度的水质污染程度,第二传感器单元2用于检测河道表面cod、氨氮和溶解氧含量,表明河道表面有机污染的程度。
33.第一传感器单元1和第二传感器单元2相结合,实现对河道水质污染物的全面检测,全面分析污染物的成分,进行针对性的治理,有利于提高治理效果。
34.进一步,第一传感器单元1借助伸缩机构3移动设置在第一安装孔8内,伸缩机构3包括:
第一电机31,固定设置在巡逻船内;第一丝杆32,设置在第一电机31的输出端,第一丝杆32从上到下依次设置有第一光轴段321、螺纹段322和第二光轴段323,第一光轴段321和第二光轴段323均为光轴,螺纹段322外壁设置有螺纹;内管33,套设在第一丝杆32外侧,第一传感器单元1设置在内管33的下端,当第一传感器单元1位于行程内的最高点时,内管33的上端与螺纹段322的上端啮合;内管33的外壁设置有第一凸起331;外管34,套设在内管33外侧,外管34的内壁沿轴向设置有第一导槽341,第一凸起331移动设置在第一导槽341内;外管34的内壁同轴设置有第一丝母342,外管34的外壁设置有锁紧件35,当第一传感器单元1位于行程内的最高点时,锁紧件35将外管34锁定在第一安装孔8的内壁,第一丝母342套设在第一光轴段321的外侧;外管34的外壁设置有第二凸起344;第一安装孔8的内壁设置有第二导槽4,第二凸起344移动设置在第二导槽4内,第一导槽341和第二导槽4的下端均设置有挡部。
35.当巡逻船行进时,内管33的上端与螺纹段322的上端啮合,外管34上端的第一丝母342位于第一光轴段321的外侧,第一传感器单元1位于水面以上,不影响巡逻船的行进。当巡逻船到达采集点时,第一电机31转动,带动第一丝杆32转动,第一丝杆32带动内管33向下移动,当内管33外壁的第一凸起331移动至第一导槽341的下端时,受到挡部的阻挡,第一凸起331带动外管34向下移动,外管34内壁设置的第一丝母342从第一光轴段321移动至螺纹段322, 第一丝母342与第一丝杆32啮合,此时,内管33的上端移动至第二光轴段323,随着第一丝杆32的转动,第一丝杆32带动第一丝母342和外管34向下移动,外管34带动内管33和第一传感器单元1继续向下移动至设定深度,进行水下数据采集。
36.采集完毕后,第一电机31反方向转动,带动第一丝杆32转动,第一丝杆32带动第一丝母342和外管34向上移动,当第一丝母342移动至第一光轴段321位置时,锁紧件35将外管34的位置锁定,同时,内管33的上端与螺纹段322的下端啮合,内管33继续向上移动。
37.本实施例中,伸缩机构3实现了内管33和外管34的两级移动,根据实际需要,也可以采用同样的原理实现多级移动,从而扩大第一传感器单元1的移动范围,实现水下不同深度水质数据的采集。
38.进一步,锁紧件35为定位弹簧销,外管34的外壁沿径向设置有第三安装孔343,定位弹簧销设置在第三安装孔343内,巡逻船的内壁设置有定位孔5,当第一传感器单元1位于行程内的最高点时,定位弹簧销的一端位于第三安装孔343内,另一端位于定位孔5内。
39.锁紧件35为定位弹簧销,在巡逻船行进时,定位弹簧销一端位于第三安装孔343内,另一端位于定位孔5内,实现外管34在巡逻船内壁的固定;当外管34内壁的第一丝母342与第一丝杆32啮合时,第一丝杆32对第一丝母342产生向下的作用力,该作用力克服定位弹簧销的锁紧力,外管34向下移动。
40.进一步,巡逻船的前端设置有第二安装孔6,第二传感器单元2包括:安装盘21,设置在第二安装孔6内,安装盘21的轴线与第二安装孔6的轴线平行;水质传感器22,水质传感器22包括cod传感器、氨氮传感器和orp传感器,多个水质传感器22沿周向设置在安装盘21上,且多个传感器的轴线均与安装盘21的轴线平行。
41.本实施例中水质传感器22为圆柱形,通过将水质传感器22的一端沿周向设置在安
装盘21上,另一端的测量头采集河道表面水质数据,这样的安装结构更紧凑,有利于节约巡逻船前端的空间。
42.进一步,还包括:第二电机23,设置在安装盘21上,第二电机23输出轴的轴线与安装盘21的轴线平行;清洗刷24, 清洗刷24的第一端与第二电机23的输出端连接,其中两个水质传感器22之间设置有停止位,停止位用于设置清洗刷24的第二端。
43.当河道表面漂浮物过多时,为避免漂浮物粘附在水质传感器22的测量头上,影响下一次采集的结果,一次采集完毕后,启动第二电机23带动清洗刷24旋转,对各测量头进行清洗,保证下一次采集结构的准确性。水质传感器22在安装时,预留有一个较大的空间,作为停止位,清洗刷24不工作时,设置在该停止位,不影响水质传感器22数据的采集。
44.进一步,巡逻船内还设置有gps定位模块、uwb定位模块和气象检测模块,停靠舱7内还设置有与第二控制器连接的无线充电模块,第二控制器还与液位传感器连接,停靠舱7的下侧设置有底板72,底板72借助升降机构73沿竖直方向移动。
45.为方便在河道上移动,巡逻船采用锂电池供电,巡逻船内部还设置有气象检测模块,当检测到有大风或暴雨天气、或者是锂电池电量不足时,由服务器提供导航信息,引导巡逻船移动至停靠舱7躲避或者充电。
46.正常情况下,停靠舱7下侧的底板72位于水面以上,当服务器接收到巡逻船的停靠请求时,服务器发送指令到第二控制器,第二控制器控制升降机构73带动底板72下降至水面以下,待巡逻船停靠在底板72上以后,升降机构73带动底板72和巡逻船向上移动至充电位,无线充电模块为巡逻船充电。其中,水面位置由液位传感器实时检测,并将当前液位数据发送至第二控制器,第二控制器根据当前液位控制底板72下降至水面以下,方便巡逻船停靠。
47.巡逻船内部设置的gps定位模块和uwb定位模块相互配合,gps定位模块用于远距离定位,uwb定位模块用于近距离厘米级精确定位。当巡逻船到达停靠舱7附近时,服务器放弃掉gps模块的定位信息,采用uwb定位模块的数据进行定位,保证巡逻船准确到达停靠舱7下侧的底板72,再由底板72带动巡逻船移动至停靠舱7内。
48.进一步,底板72上设置有漏水孔721。
49.底板72上设置有漏水孔721,这样当底板72从水面以下向上移动时,水从漏水孔721漏下,避免水的重量增加底板72移动的阻力;同时,当底板72带动巡逻船向上移动时,过多的水留在底板72上,会造成巡逻船的晃动,不利于巡逻船的稳定停靠。
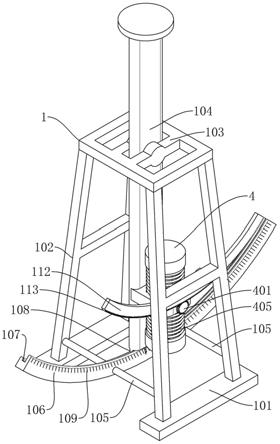
50.进一步,升降机构73包括:第二丝母731,与底板72连接;第二丝杆732,与动力机构 735连接,第二丝杆732与第二丝母731啮合;导向板733,固定设置在河道侧壁;连接杆734,连接杆734为对称设置的两个, 连接杆734的第一端与第二丝母731连接,连接杆734的第二端设置有两个滚轮737,两个滚轮737分别设置在导向板733沿厚度方向的两侧,滚轮737沿导向板733的高度方向滚动。
51.动力机构 735带动第二丝杆732旋转,如图7所示,第二丝杆732的长度方向为导向
板733的高度方向。在导向板733的导向作用下,第二丝母731带动底板72上下移动。连接板的第一端与第二丝母731连接,另一端设置两个滚轮737,两个滚轮737夹持在导向板733沿厚度方向的两侧,滚轮737沿导向板733向上滚动的摩擦力小,其他方向的摩擦力大,其他方向的摩擦力用于阻止滚轮737和导向板733发生相对滑动,进而阻止第二丝母731在第二丝杠的带动下发生转动。随着第二丝母731沿第二丝杆732上下移动,滚轮737沿导向板733上下滚动,有利于减小第二丝母731向上移动的阻力。滚轮737的设置,结构简单、不易锈蚀,保证底板72的可靠移动。
52.进一步,连接杆734的第二端设置有第四安装孔7341,滚轮737的转轴穿过第四安装孔7341,并通过螺母锁紧。
53.进一步,第四安装孔7341为条形孔,且第四安装孔7341的长度方向与导向板733的厚度方向平行。
54.滚轮737的转轴借助第四安装孔7341设置在连接板上,结构简单、操作方便、第四安装孔7341为条形孔,便于根据实际需要对滚轮737的安装位置进行微调,保证导向板733两侧滚轮737对导向板733的夹紧,进而保证良好的导向效果。
55.进一步,动力机构 735包括:第三电机7351,固定设置在停靠舱7内;主动轮7352,设置在第三电机7351的输出端;从动轮7353,通过皮带与主动轮7352连接,从动轮7353套设在第二丝杆732的上端。
56.第三电机7351依次通过主动轮7352、从动轮7353带动第二丝杆732旋转,结构简单,而且皮带传输不易锈蚀,适合河道边的潮湿环境。
57.进一步,还包括与导向板733固定连接的加强板736,第二丝杆732的下端转动设置在加强板736上。
58.本实施例停靠舱7在安装时,导向板733固定在河道侧壁,通过将加强板736设置在导向板733上,并把第二丝杆732的下端设置在加强板736上,保证第二丝杆732的可靠安装。
59.以上仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。