1.本实用新型涉及粉体供给系统。
背景技术:
2.从以往,已知有具备重量测量功能的粉体供给装置。
技术实现要素:
3.(实用新型要解决的课题)
4.在现有的粉体供给装置中,在供粉时,使匣钵的高度固定或以恒定速度下降。然而,若供给喷嘴的前端与粉锥形形状的上底面相分离,则粉自由落下的部位会露出至外部,从而发生粉的飞扬,其结果是,对周围造成污染,或者被吸尘器吸引而造成材料损毁。另外,若供给喷嘴的前端从粉锥形形状的上底面埋入,则不仅粉的重量而且粉的挤出压力会加至计量器,从而无法进行准确的重量测量。
5.为此,本实用新型的目的在于,提供一种粉体供给系统,能减少粉体的飞扬且不使装置周边的作业环境恶化。
6.(用于解决课题的技术方案)
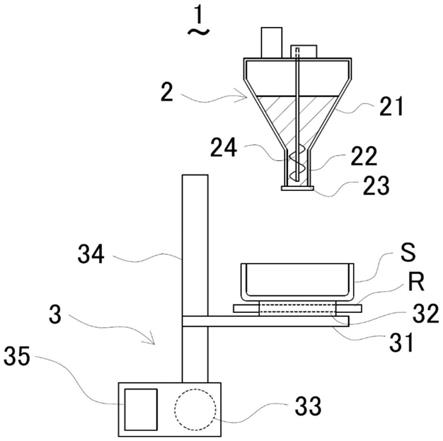
7.为了解决上述课题,本实用新型的第一形态的粉体供给系统是具有重量测量功能的粉体供给系统(1),其特征在于,所述粉体供给系统(1)具备:供给装置(2),其向匣钵(s)供给粉体(p);以及升降装置(3),其配置于所述供给装置的下方,使所述匣钵相对于所述供给装置沿上下方向升降,所述供给装置具备:料斗(21),其供粉体投入;供给喷嘴(22),其设置于所述料斗的下部;盖(23),其开闭自如地设置于所述供给喷嘴的前端;以及进料器(24),其设置于所述料斗及所述供给喷嘴的内部,将料斗中的粉体朝下方送出,所述升降装置具备:载置部(31),其用于载置所述匣钵;重量测量装置(32),其设置于所述载置部;升降机构,其使所述载置部及所述重量测量装置升降;以及速度控制装置(35),其根据距离控制信息来控制所述升降装置的下降速度,所述距离控制信息用于控制供给至所述匣钵的粉体的山的顶端(t)与所述供给喷嘴的前端之间的距离(d)。
8.另外,本实用新型的第二形态是在第一形态的粉体供给系统的基础上,其特征在于,所述距离控制信息是由所述重量测量装置测量出的信息。
9.另外,本实用新型的第三形态是在第一形态的粉体供给系统的基础上,其特征在于,所述粉体供给系统还具备时间计测装置,所述时间计测装置对由所述供给装置开始供给粉体起的时间进行计测,所述距离控制信息是由所述时间计测装置计测出的信息。
10.另外,在本实用新型的第四形态中,其特征在于,所述粉体供给系统还具备图像识别装置,所述图像识别装置通过相机来识别所述供给喷嘴的前端的图像,所述距离控制信息是由所述图像识别装置通过图像识别而得到的信息。
11.另外,本实用新型的第五形态是在第一形态至第四形态中任一项记载的粉体供给系统的基础上,其特征在于,所述距离控制信息是在供给至所述匣钵的粉体的山的顶端(t)
与所述供给喷嘴的前端分离的状态下使所述粉体的山的顶端与所述供给喷嘴的前端之间的距离(d)成为30mm以下的信息,或者是在所述供给喷嘴的前端埋入供给至所述匣钵的粉体的山的顶端(t)的状态下使所述粉体的山的顶端与所述供给喷嘴的前端之间的距离(d)成为20mm以下的信息。
12.(实用新型效果)
13.本实用新型根据用于控制供给至匣钵的粉体的山的顶端与供给喷嘴的前端之间的距离的距离控制信息来控制所述升降装置的下降速度,因此能减少粉体的飞扬,装置周边的作业环境恶化的情况得以消除。
附图说明
14.图1是说明本实用新型的粉体供给系统的概要的示意图。
15.图2a是表示上述粉体供给系统所具有的匣钵以及供给喷嘴周边的状况的示意图。
16.图2b是表示利用上述粉体供给系统所具有的升降装置来使上述匣钵上升至上端的状况的示意图。
17.图2c是表示供给喷嘴供给粉体的状况的示意图。
18.图2d是表示供给喷嘴从粉体的锥形分离的状况的示意图。
19.图3是表示上述粉体供给系统向匣钵供给粉体的处理流程的一例的流程图。
20.(标号说明)
21.1粉体供给系统
22.2供给装置
23.21料斗
24.22供给喷嘴
25.23盖
26.24进料器
27.3升降装置
28.31载置部
29.32重量测量装置
30.33电动机
31.34支柱
32.35速度控制装置
33.s匣钵
34.p粉体
具体实施方式
35.(第一实施方式)
36.以下,参照附图来详细说明本实用新型的实施方式。对各图中所示的相同或者等同的构成要素、构件、处理赋予同一标号,并酌情省略重复的说明。
37.图1是说明本实用新型的粉体供给系统1的概要的示意图。
38.粉体供给系统1是具有重量测量功能的粉体供给系统1,具备:供给装置2,其向匣
钵s供给粉体p;以及升降装置3,其配置于供给装置2的下方,使匣钵s相对于供给装置2沿上下方向升降。供给装置2具备:料斗21,其供粉体p投入;供给喷嘴22,其设置于料斗21的下部;盖23,其开闭自如地设置于供给喷嘴22的前端;以及进料器24,其设置于料斗21及供给喷嘴22的内部,将料斗21中的粉体s朝下方送出。进料器24例如是纵型螺旋进料器。
39.升降装置2具备:载置部31,其用于载置匣钵s;重量测量装置32,其设置于载置部31;升降机构,其使载置部31及重量测量装置32升降;以及速度控制装置35,其根据距离控制信息来控制升降装置3的下降速度,所述距离控制信息用于控制供给至匣钵s的粉体p的山(即,粉体组成的山)的顶端t与供给喷嘴22的前端之间的距离d。
40.升降机构具备电动机33以及支柱34等。支柱34具有用于将电动机33的动力传递给载置部31的齿轮等传递机构。
41.图2a是表示匣钵s以及供给喷嘴22周边的状况的示意图。在匣钵s的下方配设有输送辊r。输送辊r将匣钵s向工序下游输送。
42.图2b是表示利用升降装置3使匣钵s上升至上端的状况的示意图。在该状态下,供给喷嘴22与匣钵s的内侧底面相接近,且分离为使盖23能由摆动机构打开的程度。此外,在该状态下,重量测量装置32可以进行零复位处理。
43.图2c是表示供给喷嘴22供给粉体p的状况的示意图。在同图中,粉体p呈锥形形状。在粉体供给系统1中,以使供给喷嘴22的前端始终与该锥形的上底面相接的方式,使升降装置3的下降速度变化,来使匣钵s下降。
44.图2d是表示供给喷嘴22从粉体p的锥形分离的状况的示意图。在同图中,粉体p的山的顶端t与供给喷嘴22的前端之间的距离d是超过30mm的长度。若供给喷嘴22的前端与粉锥形形状的上底面分离,则粉自由落下的部位会露出至外部,发生粉的飞扬,对周围造成污染,或被吸尘器吸引而造成材料损毁。若供给喷嘴22的前端埋入粉锥形形状的上底面,则不仅粉的重量而且配设于供给喷嘴22内部的进料器24所致的粉的挤出压力会加至计量器,从而无法进行准确的重量测量。
45.为此,速度控制装置35根据距离控制信息来控制升降装置3的下降速度,该距离控制信息用于控制供给至匣钵s的粉体p的山的顶端t与供给喷嘴22的前端之间的距离d。距离控制信息是在供给至匣钵s的粉体p的山的顶端t与供给喷嘴22的前端分离的状态下使粉体p的山的顶端t与供给喷嘴22的前端之间的距离d成为30mm以下的信息,或者是在供给喷嘴22的前端埋入供给至匣钵s的粉体p的山的顶端t的状态下使粉体p的山的顶端t与供给喷嘴22的前端之间的距离d成为20mm以下的信息。若构成为控制下降速度以使距离d处于该数值的范围内,则供给喷嘴22的前端与粉体p的锥形的上底面始终大致抵接,因此能减少粉体p的自由落下所致的粉体p的飞扬。另外,供给喷嘴22不会深埋入粉体p,因此能够准确地测量供给至匣钵s的粉体p的重量。
46.距离控制信息可以是由重量测量装置32测量出的信息。这是由于,供给至匣钵s的粉体p的重量与顶端t的位置、甚至从顶端t到供给喷嘴22的距离d存在相关关系。在此情况下,例如可以根据重量来多级切换升降装置3的速度。此外,升降装置3的速度也可以无级可变。因此,根据本构成,能够利用重量测量装置32来获取距离控制信息。重量测量装置32是在将粉体p向匣钵s供给的供给工序中需要的构成,因此根据本构成,不需要用于获取距离控制信息的另外单独的构成。
47.另外,粉体供给系统1还具备时间计测装置,该时间计测装置对供给装置2开始供给粉体p起的时间进行计测,距离控制信息可以是由时间计测装置计测出的信息。在此情况下,例如可以根据时间来多级切换升降装置3的速度。此外,升降装置3的速度也可以是无级可变。根据本构成,能通过时间的计测来获取距离控制信息,因此不需要实际的粉体p的计测,能够简化构成。
48.另外,粉体供给系统1还具备图像识别装置,该图像识别装置通过相机来识别供给喷嘴22的前端的图像,距离控制信息可以是由图像识别装置通过图像识别而得到的信息。在此情况下,例如根据经图像识别而得到的信息来计算距离,并根据该距离来变更升降装置3的速度。在该实施方式中同样,升降装置3的速度既可以多级切换,也可以无级可变。根据本构成,由于能通过图像来识别粉体p的顶端t,因此能够准确地求取距离d。
49.在此,使用图3来说明粉体供给系统1向匣钵s供给粉体p的处理流程的一例。
50.首先,盖23关闭,在向匣钵s供给粉体p前的状态下,利用升降装置3使匣钵s移动至上端(s1)。此时,可以对重量测量装置32进行零复位处理。接着,打开盖23(s2)。另外,升降装置3开始下降。
51.接着,获取供给喷嘴22与粉体p的山的顶端t之间的距离d(s3)。接着,判定供给喷嘴22是否与顶端t分离(s4),在分离的情况下(s4中为“是”),判定距离d是否为30mm以下(s5)。在距离d并非30mm以下的情况下(s5中为“否”),使升降装置3的速度减慢(s6),回到步骤s3。在步骤s5中距离d为30mm以下的情况下(s5中为“是”),前进至步骤s9。
52.在步骤s4中供给喷嘴22未与顶端t分离,即供给喷嘴22埋入顶端t的情况下(s4中为“否”),判定距离d是否为20mm以下(s7),在距离d并非20mm以下的情况下(即,在供给喷嘴22从粉体p的山的顶端t埋入20mm以上的情况下),使升降装置3的速度加快(s8),回到步骤s3。在步骤s7中距离d为20mm以下的情况下(s7中为“是”),前进至步骤s9。
53.在步骤s9中,在匣钵s内的粉体重量未处于给定范围的情况下(s9中为“否”),返回至步骤s3。在匣钵s内的粉体重量处于给定范围的情况下(s9中为“是”),使匣钵s下降给定量(s10),关闭盖23(s11)。给定量是指,满足摆动式开闭的盖23进行关闭动作时不使已供给至匣钵s的粉体p飞溅的程度,供给喷嘴22距离粉体p的山的顶端t的量。此外,若是盖23设置于供给喷嘴22内的晃动阀式,则可以去掉步骤s10的动作。在此,晃动阀式的盖是指,尤其由2片半圆形的阀构成且支点位于供给喷嘴22中央的盖。最后,使匣钵s下降至输送高度,利用输送辊r将匣钵s输送至下游(s12)。
54.此外,为了提高到匣钵的粉重量的精度,在供粉将要结束时,可以使进料器24的转速减小,随之使升降装置3的下降速度减速或者停止。
55.根据本实施方式所涉及的粉体供给系统1,能减少粉体的飞扬,装置周边的作业环境恶化的情况得以消除。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。