1.本实用新型属于机器鱼控制的技术领域,尤其涉及一种仿生机器鱼的胸鳍与尾鳍协同控制系统。
背景技术:
2.水下仿生机器鱼日趋成熟,从最初lighthill的鱼体波曲线,衍生出了多种形态的鱼以及不同的控制方法。根据鱼体推进方法,可分为两种模式:身体/尾鳍模式(body and/orcaudal fin,简称bcf)和中间鳍/对鳍模式(median and/or paired fin,简称mpf)。总结现有仿生机器鱼的游动性能可知,采用bcf模式的仿生机器鱼优点是游动速度快,高机动性能好,缺点是低速机动性能差,身体易晃动、稳定性差;采用mpf模式的仿生机器鱼优点是低速机动性能好,身体稳定性好,缺点是游动速度慢。现有技术大多只采用尾鳍控制。
技术实现要素:
3.本实用新型所要解决的技术问题在于针对上述存在的问题,提供一种仿生机器鱼的胸鳍与尾鳍协同控制系统,引进了胸鳍和蠕动泵,来实现鱼类直游、转弯及上浮下潜的运动,同时增设多模态控制,实现不同挡位之间的切换。
4.本实用新型解决上述技术问题所采用的技术方案是:一种仿生机器鱼的胸鳍与尾鳍协同控制系统,其特征在于,包括鱼身壳体、设置在所述鱼身壳体两侧的胸鳍以及设于鱼身壳体尾部的尾鳍,鱼身壳体内部空腔中对应安设有胸鳍控制组件、尾鳍控制组件、浮潜模块和控制模块,所述胸鳍控制组件与胸鳍相连,所述尾鳍控制组件与尾鳍相连,所述浮潜模块包括浮潜舱和浮潜驱动组件,所述控制模块包括计算机、控制器和信息采集组件,所述信息采集组件与所述控制器的输入端相连,输出端分别与胸鳍控制组件、尾鳍控制组件和浮潜驱动组件相连,所述计算机与控制器通过水下无线光通信实现信息互联。
5.按上述方案,所述胸鳍控制组件包括两两一组的四个胸鳍舵机,一组为左右摆动驱动舵机,另一组为上下摆动驱动舵机,所述左右摆动驱动舵机通过连接件并排固定于所述鱼身壳体上,并通过舵臂与所述上下摆动驱动舵机相连,上下摆动控制舵机通过连接件与鳍条相连,所述鳍条与所述胸鳍相连。
6.按上述方案,所述尾鳍控制组件包括三组顺次连接的驱动关节,所述驱动关节由前、后u型支架和尾鳍舵机组成,所述前、后u型支架分别与尾鳍舵机的前后两侧相连,三组驱动关节通过前、后u型支架相连,位于前端的驱动关节的前u型支架固定于所述鱼身壳体上,位于后端的驱动关节的后u型支架与所述尾鳍相连。
7.按上述方案,所述浮潜驱动组件包括电机和蠕动泵,所述电机驱动蠕动泵运转,蠕动泵与所述浮潜舱相连通。
8.按上述方案,所述信息采集组件包括鱼眼相机和陀螺仪传感器,分别采集水域环境信息和机器鱼的方位信息。
9.本实用新型的有益效果是:提供一种仿生机器鱼的胸鳍与尾鳍协同控制系统,利
用胸鳍与尾鳍的协同运动对机器鱼的直线游动、转弯和变速游动等多种模态进行控制设计,同时通过蠕动泵及胸鳍协调控制完成上浮下潜的运动,以实现单模态的平稳运动控制和多模态的协调切换控制;拟采用模糊控制理论设计模糊运动控制器,实现变速时的速度平滑变化,提高运动稳定性。
附图说明
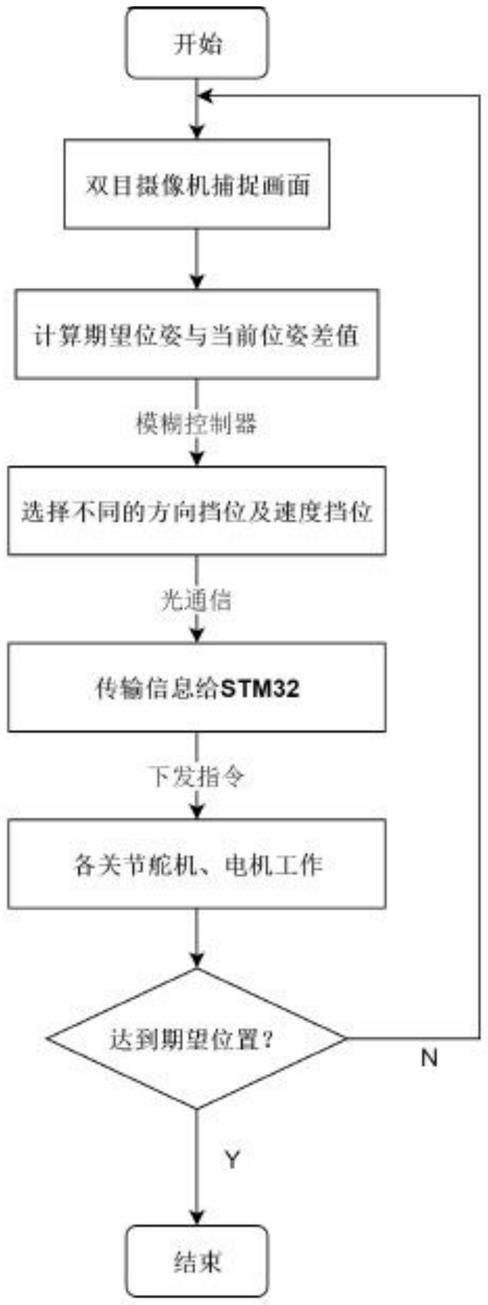
10.图1为本实用新型一个实施例的整机控制流程框图。
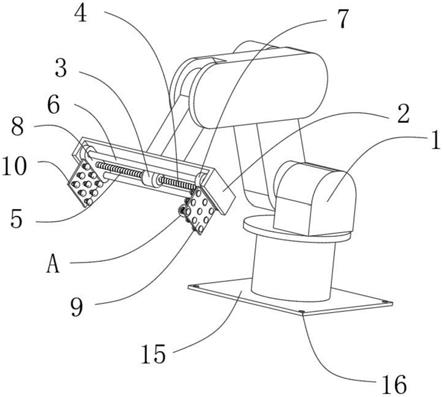
11.图2为本实用新型一个实施例的胸鳍控制组件的结构示意图。
12.图3为本实用新型一个实施例的尾鳍控制组件的结构示意图。
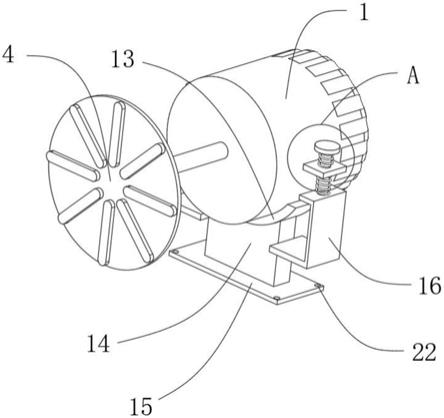
13.图4为本实用新型一个实施例的机器鱼上浮的示意图。
14.图5为本实用新型一个实施例的机器鱼下潜的示意图。
15.图6为本实用新型一个实施例的控制硬件系统设计图。
16.图7为本实用新型一个实施例的整机控制方案图。
具体实施方式
17.为更好地理解本实用新型,下面结合附图和实施例对本实用新型作进一步的描述。
18.如图1、图6、图7所示,一种仿生机器鱼的胸鳍与尾鳍协同控制系统,包括鱼身壳体 1、设置在鱼身壳体两侧的胸鳍2以及设于鱼身壳体尾部的尾鳍3,鱼身壳体内部空腔中对应安设有胸鳍控制组件、尾鳍控制组件、浮潜模块和控制模块,胸鳍控制组件与胸鳍相连,尾鳍控制组件与尾鳍相连,浮潜模块包括浮潜舱4和浮潜驱动组件,控制模块包括计算机、控制器和信息采集组件,信息采集组件与控制器的输入端相连,输出端分别与胸鳍控制组件、尾鳍控制组件和浮潜驱动组件相连,所述计算机与控制器通过水下无线光通信 (underwater wireless optical communication)实现信息互联。
19.信息采集组件包括鱼眼相机和陀螺仪传感器,分别采集水域环境信息和机器鱼的方位信息。
20.本控制系统由操作系统层、通信协议层、底层驱动层三大层级构成。操作系统层主要是用户端(计算机)进行指令控制;通信协议层上下行数据链路采用光通信方式;底层驱动层为基于stm32单片机的控制器,实现机器鱼鱼眼相机、全局监视相机、陀螺仪、湿度传感器等传感器的信息采集、运动电机控制,同时通过模糊控制理论设计模糊运动控制器,实现变速时的速度平滑变化,提高运动稳定性,依据仿生机器鱼控制系统层级,总成实现对仿生机器鱼的控制。
21.如图2所示,胸鳍控制组件包括两两一组的四个胸鳍舵机,一组为左右摆动驱动舵机 5,另一组为上下摆动驱动舵机6,左右摆动驱动舵机通过连接件7并排设置并与鱼身壳体相连,并通过舵臂8与上下摆动驱动舵机相连,上下摆动控制舵机通过连接件与鳍条9相连,鳍条与胸鳍相连。左右摆动驱动舵机的转动实现胸鳍绕展向轴的转动即胸鳍左右摆动;上下摆动驱动舵机的转动实现胸鳍绕弦向轴的转动即胸鳍上下摆动。
22.如图3所示,尾鳍控制组件包括三组顺次连接的驱动关节,驱动关节由前u型支架10、后u型支架11和尾鳍舵机12组成,前、后u型支架分别与尾鳍舵机的前后两侧相连,三组
驱动关节通过前、后u型支架相连,位于前端的驱动关节的前u型支架固定于鱼身壳体上,位于后端的驱动关节的后u型支架与尾鳍相连。
23.通过lighthill曲线,代入合适参数,将一个周期进行十等分,经matlab计算后得出每个时刻尾鳍舵机相应转角,在stm32中设置参数即可完成直游运动。在直游基础上,将尾鳍每个时刻每个尾鳍舵机向左或向右偏置22.5
°
,即可实现转弯变向。
24.其中直游、左转、右转每个挡位设置三个游动速度,如加速直游、加速转弯等,控制尾鳍舵机每次转向之间时间的间隔分别为:100ms、110ms、120ms,以适应不同的水下环境需求。同时,仿生机器鱼可通过判断期望位姿与当前位姿的偏差,进行模糊控制分析,实现不同的挡位间的切换。
25.浮潜驱动组件包括电机和蠕动泵,电机驱动蠕动泵运转,蠕动泵与浮潜舱相连通。上浮下潜的原理为:由胸鳍与蠕动泵配合运动,当浮潜舱所吸的水量使机器鱼的重力等于浮力时,机器鱼处于悬浮状态;胸鳍朝下摆动,蠕动泵排水,当浮潜舱水量小于悬浮状态时的水量时,浮力大于重力,机器鱼上浮;胸鳍朝上,蠕动泵吸水,当浮潜舱水量大于悬浮状态时,浮力小于重力,机器鱼下沉(见图4、图5)。
26.附图对本实用新型的实施例进行了描述,但是本实用新型并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本实用新型的启示下,在不脱离本实用新型宗旨和权利要求所保护的范围情况下,还可做出很多形式,这些均属于本实用新型的保护之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。