1.本实用新型涉及物流机器人技术领域,具体涉及一种仓库用物流机器人。
背景技术:
2.物流机器人是可以进行自动化搬运作业的工业机器人。搬运作业是指用一种设备握持工件,是指从一个加工位置移到另一个加工位置。搬运机器人可安装不同的末端执行器以完成各种不同形状和状态的工件搬运工作,减轻了人类繁重的体力劳动。
3.在一些堆放大件轻质货物的仓库中,为了提升空间利用率从而将运输通道设置比较窄,物流机器人可以保证货物的运送效率和降低运输过程中的磨损率,但是机器人的末端执行器比人力笨重,在搬运大体积货物时易发生振动和颠簸,在通道转弯时如果机器人缺少足够的传感器和处理器,货物与货架的边缘容易发生摩擦和碰撞,在为无人监管时存在安全隐患。
技术实现要素:
4.为了克服上述的技术问题,本实用新型的目的在于提供一种仓库用物流机器人,通过控制操作台的电机使起升机构抬起大件轻质物品升高,在底盘上放置其他货物,可以提升物流机器人的货物运输效率;操作椅固定在支撑机构一端,工作人员可以坐在操作椅上控制操作台,降低工作人员的劳动强度;多个物流机器人通过转动板侧边电磁铁的相互吸引实现组合固定,可以运输更大体积的货物,在运送货物时物流机器人的稳定性增强,减小货物的振动幅度和货架边缘的碰撞概率。
5.本实用新型的目的可以通过以下技术方案实现:
6.一种仓库用物流机器人,包括支撑机构和起升机构,所述支撑机构的上方布置有起升机构,支撑机构包括底盘,所述底盘的底面固连有三个车轮,所述底盘顶面的中间位置固连有隔板的底端,所述底盘的顶面位于隔板一侧开设有方槽,所述起升机构一侧与隔板的侧壁固连,所述底盘顶面的另一侧固连有操作台,且操作台的侧壁与隔板一侧固连,所述操作台的两侧均固连有放置箱,两个所述放置箱的底面均与底盘顶面的对应位置固连,所述操作台的一侧设置有螺纹杆,所述底盘顶面的一端对应螺纹杆位置处开设有通孔,所述螺纹杆外柱面与通孔的内壁转动连接且通过螺母固定,所述底盘的另一端铰接有转动板,所述转动板的侧边为电磁铁构成,且底盘的侧壁对应转动板位置开设有两个圆槽,所述转动板底面的两端均转动有转动连杆一端,所述转动连杆的另一端固连有压缩弹簧一端,所述压缩弹簧另一端与对应位置圆槽的内壁固连,三个车轮分别为一个驱动轮和两个从动轮,操作台内部包括控制起升机构垂直移动的电机和控制驱动轮水平移动的电机,起升机构包括货叉、门架、门架起升单元、液压传动单元和滚轮,用于将底盘顶部的物品抬起高度,以便增加物流机器人的运输量,操作椅与支撑机构分离时,手持螺纹杆顶端可以帮助支撑机构矫正运动方向。
7.进一步在于:所述支撑机构的一端对应螺纹杆一侧设置有操作椅,所述操作椅支
撑柱的底端转动连有t形板的小端,所述t形板大端的中心位置开孔并与螺纹杆底端的外柱面旋合连接,通过t形板与螺纹杆的可拆卸连接,在遇到需要人工监管的货物时,工作人员可以坐在操作椅上并控制操作台的使用,可以降低工作人员劳动强度。
8.进一步在于:所述t形板大端的顶面与底盘的底面对应通孔位置处于同一水平面,在支撑机构的运动过程中,操作椅与支撑机构保持水平固定,防止操作椅在转向过程中产生倾斜和颠簸。
9.进一步在于:所述底盘的顶面位于操作台与放置箱的侧壁之间固连有两个防滑踏板,所述底盘的顶面位于放置箱与隔板的侧壁之间固连有两个挂钩,坐在操作椅的人员可以将脚从t形板的大端放置到两个防滑踏板上防止打滑,挂钩便于将大件轻质货物绑在起升机构顶部并固定,防止货物在仓库运输过程中碰撞到货架边界掉落。
10.进一步在于:所述放置箱的底壁开设有排水孔,且放置箱的底壁对应排水孔位置处滑动嵌入有软塞,放置箱中放置物流过程中常用的工具和急救物品,通过在放置箱中注水冲洗,并打开排水孔快速排出废水,节约清理放置箱的时间。
11.进一步在于:所述转动板通过铰链转动角度范围为0
‑
30
°
,通过转动板和转动连杆转动角度,并将压缩弹簧伸展使转动板的一端贴地,便于将大件物品通过转动板推送至底盘的顶部。
12.本实用新型的有益效果:
13.1、通过调整转动板和转动连杆的转动角度,使转动板的一端贴地,将大件物品通过转动板推送至底盘的顶部并绑定在起升机构上,控制操作台的电机使起升机构抬起大件轻质物品升高,在底盘上放置其他货物,可以提升物流机器人的货物运输效率;
14.2、通过螺纹杆底端与t形板大端的连接,操作椅固定在支撑机构一端,工作人员可以坐在操作椅上控制操作台,改变驱动轮的转动方向和速率,监管物流机器人完成货物在仓库中的运输工作,降低工作人员的劳动强度;
15.3、通过多个转动板侧边电磁铁的相互吸引,将多个物流机器人组合固定,可以运输更大体积的货物,在运送货物时物流机器人的稳定性增强,减小货物的振动幅度和货架边缘的碰撞概率,闲置堆积时物流机器人的场地利用率得到提升。
附图说明
16.下面结合附图对本实用新型作进一步的说明。
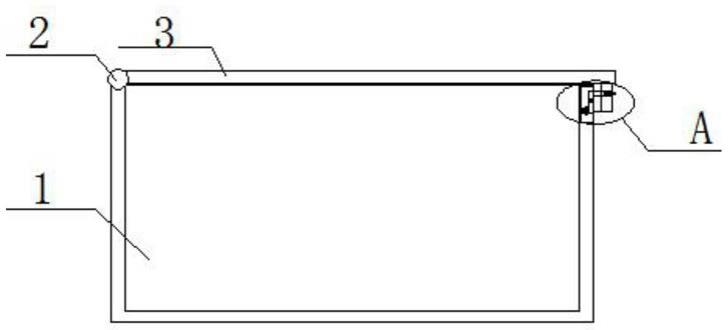
17.图1是本实用新型整体结构示意图;
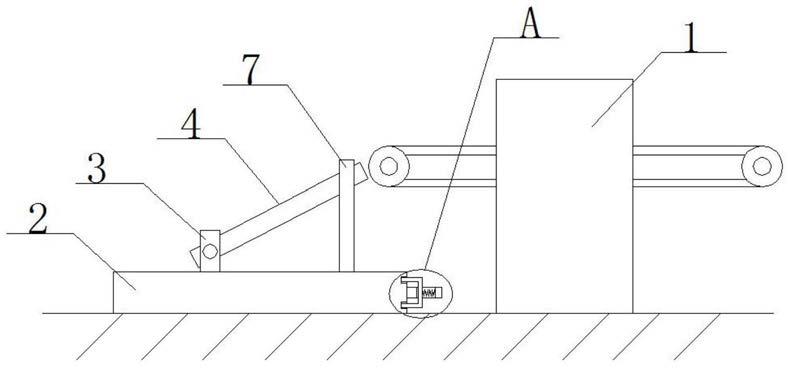
18.图2是本实用新型中操作台结构示意图;
19.图3是本实用新型中转动板结构示意图;
20.图4是本实用新型中支撑机构俯视示意图;
21.图5是本实用新型中转动板组合示意图。
22.图中:100、支撑机构;110、底盘;111、车轮;112、方槽;113、防滑踏板;114、挂钩;115、通孔;116、圆槽;120、隔板;130、操作台;140、放置箱;141、排水孔;142、软塞;150、螺纹杆;160、转动板;161、转动连杆;162、压缩弹簧;200、起升机构;300、操作椅;310、t形板。
具体实施方式
23.下面将结合本实用新型实施例,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本实用新型保护的范围。
24.请参阅图1
‑
5所示,一种仓库用物流机器人,包括支撑机构100和起升机构200,支撑机构100的上方布置有起升机构200,支撑机构100包括底盘110,底盘110的底面固连有三个车轮111,底盘110顶面的中间位置固连有隔板120的底端,底盘110的顶面位于隔板120一侧开设有方槽112,起升机构200一侧与隔板120的侧壁固连,底盘110顶面的另一侧固连有操作台130,且操作台130的侧壁与隔板120一侧固连,操作台130的两侧均固连有放置箱140,两个放置箱140的底面均与底盘110顶面的对应位置固连,操作台130的一侧设置有螺纹杆150,底盘110顶面的一端对应螺纹杆150位置处开设有通孔115,螺纹杆150外柱面与通孔115的内壁转动连接且通过螺母固定,底盘110的另一端铰接有转动板160,转动板160的侧边为电磁铁构成,且底盘110的侧壁对应转动板160位置开设有两个圆槽116,转动板160底面的两端均转动有转动连杆161一端,转动连杆161的另一端固连有压缩弹簧162一端,压缩弹簧162另一端与对应位置圆槽116的内壁固连,转动连杆161的另一端固连有压缩弹簧162一端,压缩弹簧162另一端与对应位置圆槽116的内壁固连,三个车轮111分别为一个驱动轮和两个从动轮,操作台130内部包括控制起升机构200垂直移动的电机和控制驱动轮水平移动的电机,起升机构200包括货叉、门架、门架起升单元、液压传动单元和滚轮,用于将底盘110顶部的物品抬起高度,以便增加物流机器人的运输量,操作椅300与支撑机构100分离时,手持螺纹杆150顶端可以帮助支撑机构100矫正运动方向。
25.支撑机构100的一端对应螺纹杆150一侧设置有操作椅300,操作椅300支撑柱的底端转动连有t形板310的小端,t形板310大端的中心位置开孔并与螺纹杆150底端的外柱面旋合连接,通过t形板310与螺纹杆150的可拆卸连接,在遇到需要人工监管的货物时,工作人员可以坐在操作椅300上并控制操作台130的使用,可以降低工作人员劳动强度,t形板310大端的顶面与底盘110的底面对应通孔115位置处于同一水平面,在支撑机构100的运动过程中,操作椅300与支撑机构100保持水平固定,防止操作椅300在转向过程中产生倾斜和颠簸。
26.底盘110的顶面位于操作台130与放置箱140的侧壁之间固连有两个防滑踏板113,底盘110的顶面位于放置箱140与隔板120的侧壁之间固连有两个挂钩114,坐在操作椅300的人员可以将脚从t形板310的大端放置到两个防滑踏板113上防止打滑,挂钩114便于将大件轻质货物绑在起升机构200顶部并固定,防止货物在仓库运输过程中碰撞到货架边界掉落。
27.放置箱140的底壁开设有排水孔141,且放置箱140的底壁对应排水孔141位置处滑动嵌入有软塞142,放置箱140中放置物流过程中常用的工具和急救物品,通过在放置箱140中注水冲洗,并打开排水孔141快速排出废水,节约清理放置箱140的时间,转动板160通过铰链转动角度范围为0
‑
30
°
,通过转动板160和转动连杆161转动角度,并将压缩弹簧162伸展使转动板160的一端贴地,便于将大件物品通过转动板160推送至底盘110的顶部。
28.如图5所示,转动板160的侧边为电磁铁,通过多个转动板160侧边吸引连接,将多
个物流机器人的支撑机构100贴靠连接,合并增大底盘110的顶面支撑面积,可以通过单人控制操作台130来监管和运输多个货物和运输更大体积的物品;同时底盘110和转动板160组成正六边形结构,单个机器人和多个机器人组合的占地空间固定,堆积摆放的场地利用率提高,由于操作台130可以统一调整车轮111的运动方向,在运送货物过程的转向通过性增强,可以减小在转向过程中货物与货架的边缘碰撞概率。
29.工作原理:使用时,通过转动板160和转动连杆161转动角度,并将压缩弹簧162伸展使转动板160的一端贴地,将大件物品通过转动板160推送至底盘110的顶部,从放置箱140中取出绳子将大件轻质物品绑定在起升机构200上,控制操作台130的电机使起升机构200抬起大件轻质物品升高,在底盘110上放置其他货物,可以提升物流机器人的货物运输效率;
30.通过螺纹杆150底端与t形板310大端的连接固定,操作椅300固定在支撑机构100靠近操作台130一端,工作人员可以坐在操作椅300上控制操作台130,改变一个为驱动轮的车轮111的转动方向和速率,监管物流机器人完成货物在仓库中的运输工作,降低工作人员的劳动强度;
31.通过多个转动板160侧边电磁铁的相互吸引,将多个物流机器人组合固定,可以运输更大体积的货物,在运送货物时物流机器人的稳定性增强,减小货物的振动幅度和货架边缘的碰撞概率,闲置堆积时物流机器人的场地利用率也得到提升。
32.在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
33.以上内容仅仅是对本实用新型所作的举例和说明,所属本技术领域的技术人员对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离实用新型或者超越本权利要求书所定义的范围,均应属于本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。