1.本发明涉及移动体的移动控制系统、移动体和移动体系统。
背景技术:
2.专利文献1公开有移动体的移动控制系统的例子。移动控制系统根据由摄像机拍摄到的图像确定移动体的位置。移动控制系统将移动指示发送到移动体。
3.现有技术文献
4.专利文献
5.专利文献1:日本特许第6402266号公报
技术实现要素:
6.发明要解决的课题
7.但是,在专利文献1的移动控制系统中,在移动体位于由摄像机拍摄的图像的范围外时,根据过去发送的移动指示来估计当前的移动体的位置。这里,在移动体由于轮胎打滑等而未按照指示进行移动的情况下,移动体的位置的估计产生误差。该情况下,移动控制系统无法高精度地从外部控制移动体的移动。
8.本发明正是为了解决这种课题而完成的。本发明的目的在于,提供能够高精度地从外部控制移动体的移动的移动体的移动控制系统、该移动控制系统控制的移动体以及具有该移动控制系统和该移动体的移动体系统。
9.用于解决课题的手段
10.本发明的移动体的移动控制系统具有:地图数据存储部,其存储移动体进行移动的移动区域的地图数据;路径搜索部,其搜索从移动体的位置到目标位置为止的路径;指令部,其将根据路径搜索部搜索到的路径进行移动的指令输出到移动体;位置确定部,其将移动区域的一部分设为识别范围,在移动体位于识别范围内时,确定移动体的位置;位置估计部,其在移动体位于识别范围外时,根据位置确定部确定的识别范围内的位置和移动体检测到的移动体的移动量,估计移动体在识别范围外的估计位置;以及位置校正部,其根据地图数据和移动体检测到的周边物的距离信息,对估计位置进行校正。
11.本发明的移动体具有:驱动部,其产生在移动区域进行移动的驱动力,该移动区域的一部分包含移动控制系统的识别范围;移动量检测部,其检测移动区域中的移动量,向移动控制系统的位置估计部输出移动量,该位置估计部估计识别范围外的估计位置,作为从由移动控制系统的位置确定部确定的识别范围内的位置起的相对位置;距离检测部,其在移动区域中检测周边物的距离信息,向移动控制系统的位置校正部输出距离信息,该位置校正部根据移动区域的地图数据和距离信息对估计位置进行校正;以及动作控制部,其根据从由位置确定部确定的位置或由位置校正部校正后的位置移动到目标位置的指令的输入,对驱动部的动作进行控制。
12.本发明的移动体系统具有:移动体,其在移动区域进行移动;以及移动控制系统,
其向移动体输出进行移动的指令,移动体具有:驱动部,其产生在移动区域进行移动的驱动力;移动量检测部,其检测移动区域中的移动量;距离检测部,其在移动区域中检测当前位置的周边物的距离信息;以及动作控制部,其根据被输入的指令使驱动部进行动作,移动控制系统具有:地图数据存储部,其存储移动区域的地图数据;路径搜索部,其搜索从移动体的位置到目标位置为止的路径;指令部,其将根据路径搜索部搜索到的路径进行移动的指令输出到移动体的动作控制部;位置确定部,其将移动区域的一部分设为识别范围,在移动体位于识别范围内时,确定移动体的位置;位置估计部,其在移动体位于识别范围外时,根据位置确定部确定的识别范围内的位置和移动量检测部检测到的移动量,估计移动体在识别范围外的估计位置;以及位置校正部,其根据地图数据和距离检测部检测到的距离信息,对估计位置进行校正。
13.发明效果
14.根据本发明,移动控制系统将移动区域的一部分设为识别范围,在移动体位于识别范围内时,确定移动体的位置。移动控制系统在移动体位于识别范围外时,根据确定的识别范围内的位置和移动体的移动量估计移动体在识别范围外的估计位置。移动体检测移动体的移动量。移动控制系统根据地图数据和周边物的距离信息对估计位置进行校正。移动体检测周边物的距离信息。移动控制系统将根据从移动体的位置到目标位置为止的路径进行移动的指令输出到移动体。移动体根据从移动控制系统输入的指令,在移动区域进行移动。由此,能够高精度地从外部控制移动体的移动。
附图说明
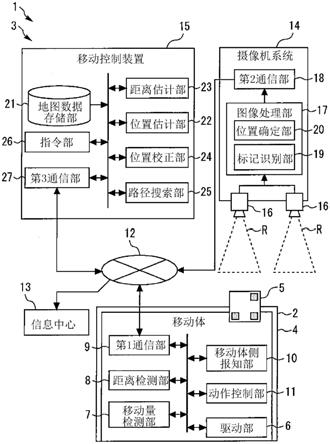
15.图1是实施方式1的移动体系统的结构图。
16.图2是示出实施方式1的移动体系统中的移动体的位置的确定和估计的例子的图。
17.图3是示出实施方式1的移动体系统中的移动体的位置的校正的例子的图。
18.图4是示出实施方式1的移动体系统的动作的例子的流程图。
19.图5是示出实施方式1的移动体系统的动作的例子的流程图。
20.图6是示出实施方式1的移动体系统的主要部分的硬件结构的图。
21.图7是实施方式2的移动体系统的结构图。
22.图8是示出实施方式3的移动体系统对移动体的位置的校正的例子的图。
23.图9是实施方式4的移动体系统的结构图。
24.图10是实施方式5的移动体系统的结构图。
25.图11是示出实施方式5的移动体系统中的移动体数据的例子的图。
26.图12是示出实施方式5的移动体系统的动作的例子的流程图。
具体实施方式
27.参照附图对用于实施本发明的方式进行说明。在各图中,对相同或相当的部分标注相同标号,适当简化或省略重复的说明。
28.实施方式1
29.图1是实施方式1的移动体系统的结构图。
30.移动体系统1例如应用于建筑物、或者室内或室外区域等。移动体系统1具有移动
体2和移动控制系统3。
31.移动体2是在移动区域进行移动的装置。移动区域例如是建筑物的内部或外部的区域、或者室内或室外区域的区域等。这里,建筑物的外部的区域例如包含建筑物的外周。移动体2例如是自走式的机器人。移动体2具有壳体4。移动体2也可以具有设置于壳体4的标记5。移动体2具有驱动部6、移动量检测部7、距离检测部8、第1通信部9、移动体侧报知部10和动作控制部11。
32.壳体4是构成移动体2的外廓的部分。
33.标记5是表示移动体2的信息的显示。移动体2的信息例如是识别移动体2的识别信息。标记5例如通过记号、形状、字符串、一维条形码、二维码或色码等表示信息。在该例子中,标记5具有方向性。标记5固定于壳体4的外表面。标记5例如设置于壳体4的上表面。
34.驱动部6是产生驱动力的部分。驱动部6例如包含马达和通过马达进行旋转的轮胎。
35.移动量检测部7是检测移动体2的移动量的部分。移动体2的移动量例如是移动体2的位置的变化量。或者,移动体2的移动量也可以是能够计算移动体2的位置的变化量的信息。在该例子中,移动体2的位置包含移动体2在移动区域中的坐标和移动体2的姿态。移动体2的姿态例如是移动体2的朝向。移动体2的移动量例如是移动体2的坐标的变化量。或者,例如在驱动部6通过马达和轮胎产生驱动力的情况下,移动体2的移动量也可以是轮胎的旋转角。此时,移动量检测部7例如具有检测轮胎的旋转角的编码器。
36.距离检测部8是检测移动区域中的移动体2的周边物的距离信息的部分。周边物的距离信息是移动体2与移动体2的周边物之间的距离的信息。移动体2的周边物是移动体2周围的物体。移动体2的周边物例如是包含移动区域的建筑物的墙壁、门或柱子等构造物或者在移动区域进行移动的行人或其他移动体2等。距离检测部8例如具有光学式或超声波式等的非接触式的距离传感器。距离检测部8例如也可以具有lidar(light detection and ranging:激光雷达)装置。
37.第1通信部9例如是通过无线方式而与移动体2外部的装置进行信息通信的部分。在该例子中,第1通信部9与网络12连接。网络12例如是互联网、内联网或vpn(virtual private network:虚拟专用网络)等。
38.移动体侧报知部10是报知与移动体2有关的状况的部分。例如,通过网络12向信息中心13的服务器计算机发送信息,由此,移动体侧报知部10进行报知。信息中心13例如是收集移动体系统1等的信息等的据点。信息中心13的服务器计算机例如在从移动体侧报知部10接收信息时,向信息中心13的操作员报知该信息。
39.动作控制部11是对驱动部6的动作进行控制的部分。动作控制部11通过驱动部6的动作的控制对移动体2在移动区域中的移动进行控制。
40.移动控制系统3具有摄像机系统14和移动控制装置15。
41.摄像机系统14具有多个摄像机16、图像处理部17和第2通信部18。
42.多个摄像机16分别设置于包含移动区域的建筑物。多个摄像机16例如分别设置于移动区域的上方的天花板或墙壁等。多个摄像机16分别是拍摄移动区域的一部分的装置。多个摄像机16例如分别是监视摄像机。
43.图像处理部17是通过对多个摄像机16分别拍摄的图像进行处理来提取信息的部
分。图像处理部17具有标记识别部19和位置确定部20。
44.标记识别部19是在拍摄到的图像中识别标记5的部分。标记识别部19例如搭载从识别到的标记5读取移动体2的识别信息的功能。标记识别部19例如搭载对识别到的标记5的位置进行识别的功能。这里,标记5的位置包含移动区域中的标记5的坐标和标记5的朝向。标记识别部19也可以在标记5的位置识别中使用拍摄到图像的摄像机16的位置信息。
45.位置确定部20是在移动体2位于识别范围内时确定该移动体2的位置的部分。在该例子中,位置确定部20的识别范围是多个摄像机16各自的拍摄范围。位置确定部20例如根据标记识别部19识别到的标记5的位置确定移动体2的位置。这里,位置确定部20对移动体2的位置的确定精度被调整成在移动体2的移动控制中是充分的精度。
46.第2通信部18例如是通过有线或无线方式而与外部的装置进行图像处理部17提取出的信息通信的部分。在该例子中,第2通信部18与网络12连接。
47.移动控制装置15例如设置于建筑物。移动控制装置15例如是服务器计算机。移动控制装置15具有地图数据存储部21、位置估计部22、距离估计部23、位置校正部24、路径搜索部25、指令部26和第3通信部27。
48.地图数据存储部21是存储地图数据的部分。地图数据是包含移动区域的地图信息的数据。地图信息例如是移动区域中的通路的墙壁的坐标等信息。
49.位置估计部22是估计移动体2的估计位置的部分。这里,估计位置被估计为从由位置确定部20确定的识别范围内的位置移动由移动量检测部7检测到的移动量后的识别范围外的位置。另外,识别范围内的位置是包含识别范围内的坐标的位置。此外,识别范围外的位置是包含识别范围外的坐标的位置。
50.距离估计部23是如下部分:在移动体2位于估计位置的情况下,根据地图数据估计由该移动体2的距离检测部8检测到的距离信息。这里,距离估计部23估计的距离信息基于移动体2的估计位置和地图数据,因此,不包含与地图上不存在的例如行人等之间的距离的信息。
51.位置校正部24是根据地图数据和移动体2的距离检测部8检测到的周边物的距离信息对位置估计部22估计出的估计位置进行校正的部分。这里,移动量检测部7检测到的移动量例如可能由于轮胎打滑、空转、漂移或计测误差等而产生误差。估计位置是以位置确定部20确定的位置为基准对移动量进行累计而得到的。因此,估计位置可能蓄积移动量的误差。位置校正部24进行的校正例如是针对这样蓄积有误差的估计位置的校正。
52.路径搜索部25是根据地图数据搜索从移动体2的位置到目标位置为止的路径的部分。在移动体2位于识别范围内的情况下,移动体2的位置例如是由位置确定部20确定的位置。在移动体2位于识别范围外的情况下,移动体2的位置例如是位置校正部24对由位置估计部22确定的估计位置进行校正后的位置。目标位置是针对移动体2设定的移动区域内的位置。目标位置例如是针对移动体2设定的移动区域内的待机场所的位置、移动区域内的移动体2的目的地的位置或多个摄像机16中的任意摄像机的拍摄范围内的位置等。
53.指令部26是针对移动控制装置15的外部装置输出指令的部分。指令部26例如将按照路径搜索部25搜索到的路径进行移动的指令输出到移动体2。
54.第3通信部27是移动控制装置15例如通过有线或无线方式而与外部装置进行信息通信的部分。这里,通信的信息例如包含针对移动体2的指令。在该例子中,第3通信部27与
网络12连接。
55.接着,使用图2对移动体系统1中的移动体2的位置的确定和估计的例子进行说明。
56.图2是示出实施方式1的移动体系统中的移动体的位置的确定和估计的例子的图。
57.在图2中,示出从侧方观察的移动体2。移动体2在移动区域进行移动。
58.在图2中,多个摄像机16分别设置于移动区域上方的天花板c。
59.在移动体2位于多个摄像机16中的任意摄像机的拍摄范围r内时,摄像机系统14的标记识别部19在拍摄到的图像中识别移动体2的标记5。标记识别部19从标记5读取移动体2的识别信息。标记识别部19识别标记5的位置。位置确定部20根据识别到的标记5的位置确定移动体2的位置。第2通信部18将确定的移动体2的位置s、移动体2的识别信息和图像的拍摄时刻发送到移动控制装置15。
60.移动控制装置15的第3通信部27接收确定的移动体2的位置s和识别信息。在该例子中,位置估计部22将移动体2的位置s与移动体2的识别信息对应起来进行更新并存储。路径搜索部25搜索从移动体2的位置s到目标位置为止的路径。在该例子中,目标位置是移动体2的目的地的位置。移动体2的目的地是在移动体2开始移动之前预先设定的。移动体2的目的地与移动体2的识别信息对应起来。指令部26将按照搜索到的路径进行移动的指令通过第3通信部27输出到移动体2。
61.移动体2的第1通信部9接收从指令部26输入的指令。驱动控制部按照输入的指令使驱动部6进行动作。移动体2通过驱动部6产生的驱动力在地面f的上方移动。移动量检测部7检测移动体2的移动量。距离检测部8检测移动体2的周边物的距离信息。第1通信部9将包含检测到的移动量和距离信息以及移动量和距离信息的检测时刻在内的信息发送到移动控制装置15。在该例子中,移动体2按照预先设定的时间向移动控制装置15发送信息。
62.在移动体2不位于多个摄像机16中的任何摄像机的拍摄范围r内时,图像处理部17判定为移动体2位于拍摄范围r外。例如,在多个摄像机16中的任何摄像机拍摄到的图像中均未识别到移动体2的标记5时,标记识别部19判定为移动体2位于拍摄范围r外。第2通信部18将移动体2位于拍摄范围r外这样的判定结果和该移动体2的识别信息发送到移动控制装置15。
63.移动控制装置15的第3通信部27接收判定结果和移动体2的识别信息。位置估计部22将与接收到的识别信息对应起来存储的位置s设为基准位置。位置估计部22根据确定基准位置的图像的拍摄时刻、从移动体2输入的移动量和该移动量的检测时刻,通过移动体2相对于基准位置的相对位置来估计估计位置g。
64.接着,使用图3对移动体系统1中的移动体2的位置的校正的例子进行说明。
65.图3是示出实施方式1的移动体系统中的移动体的位置的校正的例子的图。
66.在图3中,示出从上方观察的移动体2。移动体2在移动区域中在通路上移动。
67.移动控制装置15的距离估计部23估计由位于估计位置g的移动体2的距离检测部8检测到的距离信息。在该例子中,移动体2的估计位置g是路径p上的位置。移动体2朝向沿着路径p的方向。因此,距离估计部23估计距离检测部8检测与作为在移动体2的左右方向上位于相等距离的周边物的通路的墙壁w之间的距离信息。
68.另一方面,移动体2由于例如移动量的误差的蓄积等而在从估计位置g偏离的位置移动。此时,距离检测部8将位于检测范围d内的物体设为周边物,检测周边物的距离信息。
在该例子中,移动体2在靠近通路中对置的一对墙壁w中的一方的位置移动。因此,距离检测部8检测与作为在移动体2的左右方向上位于不同距离的周边物的通路的墙壁w之间的距离信息。
69.位置校正部24取得距离估计部23估计出的距离信息和距离检测部8检测到的距离信息。位置校正部24根据估计出的距离信息与检测到的距离信息的差异对估计位置g进行校正。
70.位置校正部24在判定为该差异是估计位置g与实际位置的偏移造成的差异时,进行估计位置g的校正。位置校正部24例如在估计出的距离信息与检测到的距离信息的差异通过旋转和平移而消除时,判定为该差异是估计位置g与实际位置的偏移造成的差异。此时,位置校正部24根据该旋转和平移进行估计位置g的校正。
71.路径搜索部25搜索从校正后的移动体2的位置到目标位置为止的路径。路径搜索部25在移动体2到达目标位置的情况下,例如向移动体2通知到达目标位置。另一方面,指令部26在移动体2未到达目标位置的情况下,将按照搜索到的路径进行移动的指令通过第3通信部27输出到移动体2。
72.移动体2按照从移动控制装置15的指令部26输入的指令进行移动。此时,移动体2的动作控制部11例如根据距离检测部8检测到的距离信息,判定在移动体2的前进路上是否存在障碍物。动作控制部11在判定为在前进路上存在障碍物的情况下,优先于从移动控制装置15输入的指令而进行躲避障碍物的移动体2的躲避动作。动作控制部11也可以在正在进行躲避动作时,向移动控制装置15通知处于躲避动作中。
73.这里,根据障碍物的形状或位置等,有时移动体2很难躲避该障碍物。移动体侧报知部10在判定为在移动体2的前进路上存在障碍物的情况下,该判定持续了比预先设定的时间长的时间时,例如向信息中心13的服务器计算机报知未能躲避障碍物。
74.接着,使用图4和图5对移动体系统1的动作的例子进行说明。
75.图4和图5是示出实施方式1的移动体系统的动作的例子的流程图。
76.在图4中,示出移动控制系统3的动作的例子。
77.在步骤s101中,标记识别部19在多个摄像机16分别拍摄到的图像中搜索移动体2的标记5。移动控制系统3的动作进入步骤s102。
78.在步骤s102中,标记识别部19判定是否在多个摄像机16中的任意摄像机拍摄到的图像中检测到移动体2的标记5。在判定结果为“是”的情况下,移动控制系统3的动作进入步骤s103。在判定结果为“否”的情况下,移动控制系统3的动作进入步骤s104。
79.在步骤s103中,位置确定部20根据标记识别部19识别到的标记5的位置确定移动体2的位置。然后,移动控制系统3的动作进入步骤s108。
80.在步骤s104中,位置估计部22根据由位置确定部20确定的移动体2的位置和移动体2的移动量检测部7检测到的移动量估计移动体2的估计位置。然后,移动控制系统3的动作进入步骤s105。
81.在步骤s105中,距离估计部23估计位于估计位置的移动体2的距离检测部8检测到的周边物的距离信息。然后,移动控制系统3的动作进入步骤s106。
82.在步骤s106中,位置校正部24判定距离估计部23估计出的距离信息和移动体2的距离检测部8检测到的距离信息是否匹配。在判定结果为“否”的情况下,移动控制系统3的
动作进入步骤s107。在判定结果为“是”的情况下,移动控制系统3的动作进入步骤s108。
83.在步骤s107中,位置校正部24根据距离估计部23估计出的距离信息与距离检测部8检测到的距离信息的差异,对移动体2的估计位置进行校正。然后,移动控制系统3的动作进入步骤s105。
84.在步骤s108中,路径搜索部25根据地图数据,搜索从移动体2的位置到移动体2的目标位置为止的路径。然后,移动控制系统3的动作进入步骤s109。
85.在步骤s109中,路径搜索部25判定移动体2是否到达目标位置。在判定结果为“否”的情况下,移动控制系统3的动作进入步骤s110。在判定结果为“是”的情况下,移动控制系统3的动作结束。
86.在步骤s110中,指令部26将沿着路径搜索部25搜索到的路径进行移动的指令输出到移动体2。然后,移动控制系统3的动作进入步骤s101。
87.在图5中,示出移动体2的动作的例子。
88.在步骤s201中,移动量检测部7检测移动体2的移动量。然后,移动量检测部7将检测到的移动量输出到移动控制系统3的位置估计部22。然后,移动体2的动作进入步骤s202。
89.在步骤s202中,距离检测部8检测移动体2的周边物的距离信息。然后,距离检测部8将检测到的距离信息输出到移动控制系统3的位置校正部24。然后,移动体2的动作进入步骤s203。
90.在步骤s203中,动作控制部11根据距离信息判定在移动体2的前进路上是否存在障碍物。在判定结果为“否”的情况下,移动体2的动作进入步骤s204。在判定结果为“是”的情况下,移动体2的动作进入步骤s205。
91.在步骤s204中,动作控制部11根据从移动控制系统3输入的指令使驱动部6进行动作。移动体2通过驱动部6的动作进行移动。然后,移动体2的动作进入步骤s201。
92.在步骤s205中,移动体侧报知部10判定躲避障碍物是否失败。例如在判定为在移动体2的前进路上存在障碍物的情况下,通过该判定是否持续了比预先设定的时间长的时间的判定,进行躲避障碍物是否失败的判定。在判定结果为“否”的情况下,移动体2的动作进入步骤s206。在判定结果为“是”的情况下,移动体2的动作进入步骤s207。
93.在步骤s206中,动作控制部11优先于从移动控制系统3输入的指令而进行移动体2的躲避动作。然后,移动体2的动作进入步骤s201。
94.在步骤s207中,移动体侧报知部10报知未能躲避障碍物。动作控制部11控制驱动部6以使移动体2停止。然后,移动体2的动作结束。
95.如以上说明的那样,实施方式1的移动控制系统3具有地图数据存储部21、路径搜索部25、指令部26、位置确定部20、位置估计部22和位置校正部24。地图数据存储部21存储移动体2进行移动的移动区域的地图数据。路径搜索部25搜索从移动体2的位置到目标位置为止的路径。指令部26将根据路径搜索部25搜索到的路径进行移动的指令输出到移动体2。位置确定部20将移动区域的一部分设为识别范围。位置确定部20在移动体2位于识别范围内时,确定移动体2的位置。位置估计部22在移动体2位于识别范围外时,根据位置确定部20确定的识别范围内的位置和移动体2检测到的移动体2的移动量,估计移动体2在识别范围外的估计位置。位置校正部24根据地图数据和移动体2检测到的周边物的距离信息对估计位置进行校正。
96.此外,实施方式1的移动体2具有驱动部6、移动量检测部7、距离检测部8和动作控制部11。驱动部6产生在移动区域进行移动的驱动力,该移动区域的一部分包含移动控制系统3的识别范围。移动量检测部7检测移动区域中的移动量。移动量检测部7向移动控制系统3的位置估计部22输出移动量。移动控制系统3的位置估计部22估计识别范围外的估计位置,作为从由移动控制系统3的位置确定部20确定的识别范围内的位置起的相对位置。距离检测部8在移动区域中检测周边物的距离信息。距离检测部8向移动控制系统3的位置校正部24输出距离信息。移动控制系统3的位置校正部24根据移动区域的地图数据和距离信息对估计位置进行校正。动作控制部11根据从由位置确定部20确定的位置或由位置校正部24校正后的位置移动到目标位置的指令的输入,对驱动部6的动作进行控制。
97.此外,实施方式1的移动体系统1具有移动体2和移动控制系统3。移动体2在移动区域进行移动。移动控制系统3向移动体2输出进行移动的指令。移动体2具有驱动部6、移动量检测部7、距离检测部8和动作控制部11。驱动部6产生在移动区域进行移动的驱动力。移动量检测部7检测移动区域中的移动量。距离检测部8在移动区域中检测当前位置的周边物的距离信息。动作控制部11根据被输入的指令使驱动部6进行动作。移动控制系统3具有地图数据存储部21、路径搜索部25、指令部26、位置确定部20、位置估计部22和位置校正部24。地图数据存储部21存储移动区域的地图数据。路径搜索部25搜索从移动体2的位置到目标位置为止的路径。指令部26将根据路径搜索部25搜索到的路径进行移动的指令输出到移动体2的动作控制部11。位置确定部20将移动区域的一部分设为识别范围。位置确定部20在移动体2位于识别范围内时,确定移动体2的位置。位置估计部22在移动体2位于识别范围外时,根据位置确定部20确定的识别范围内的位置和移动量检测部7检测到的移动量,估计移动体2在识别范围外的估计位置。位置校正部24根据地图数据和距离检测部8检测到的距离信息,对估计位置进行校正。
98.在移动体2位于识别范围内时,由位置确定部20确定移动体2的位置。在移动体2位于识别范围外时,根据过去确定的识别范围内的位置和从该位置起的移动量,由位置估计部22估计移动体2的估计位置。这里,估计位置是以位置确定部20确定的位置为基准对移动量进行累计而得到的。因此,在估计位置可能蓄积移动量的误差。位置校正部24针对蓄积有误差的估计位置,根据地图数据和距离信息进行校正。在实际的移动体2的位置检测距离信息,因此,不包含累计引起的误差的蓄积。由此,移动控制系统3能够高精度地掌握位于识别范围外的移动体2的位置。移动控制系统3根据这样掌握的位置,向移动体2输出进行移动的指令。由此,能够高精度地从外部控制移动体2的移动。
99.移动体2根据移动控制系统3的指令进行移动。因此,移动体2不需要具有移动区域的地图数据。或者,移动体2不需要为了移动而生成移动区域的地图数据。针对不进行基于地图数据的移动的单功能的移动体2,移动控制系统3也能够远程地进行到目标位置为止的移动体2的移动控制。
100.即使在识别范围外,移动控制系统3也能够校正通过移动量的累计而估计出的估计位置的误差。因此,能够减小识别范围相对于移动区域的比例。因此,例如在识别范围是摄像机16的拍摄范围的情况下,移动控制系统3能够以较少的摄像机16的台数高精度地进行移动体2的移动控制。
101.此外,移动控制系统3具有距离估计部23。距离估计部23根据地图数据估计位于估
计位置的情况下由移动体2检测到的距离信息。
102.移动控制系统3能够对距离估计部23估计出的距离信息和距离检测部8检测到的距离信息双方进行比较。由此,移动控制系统3能够更加准确地掌握估计位置与实际位置的差异。
103.此外,位置校正部24根据距离估计部23估计出的距离信息与移动体2检测到的距离信息的差异对估计位置进行校正。
104.距离信息由移动体2的位置与周边物的关系来决定。因此,距离信息与移动体2的移动历史无关。由此,能够对移动体2的估计位置进行校正而不受累计引起的误差的蓄积影响。
105.此外,位置确定部20将对移动区域的一部分进行拍摄的摄像机16的拍摄范围设为识别范围。位置确定部20根据摄像机16拍摄的图像确定移动体2的位置。
106.位置确定部20能够通过图像取得移动体2的位置。此外,位置确定部20能够将由监视摄像机等已设的摄像机16拍摄到的图像用于移动体2的位置确定。另外,位置确定部20也可以利用由位置控制系统用的新设的摄像机16拍摄到的图像确定移动体2的位置。
107.此外,移动控制系统3具有标记识别部19。标记识别部19在摄像机16拍摄的图像中识别设置于移动体2的外表面的标记5。标记识别部19根据识别到的标记5,读取识别移动体2的识别信息。
108.此外,移动体2具有标记5。标记5包含识别信息。标记5在识别范围内被移动控制系统3识别。
109.由此,容易检测移动体2。此外,在移动体2不具有外观上的特征的情况下,移动控制系统3也能够检测移动体2。此外,通过识别信息,容易识别移动体2。由此,容易追踪移动体2。
110.此外,移动控制系统3的标记识别部19在摄像机16拍摄的图像中识别标记5的位置。位置确定部20根据标记识别部19识别到的标记5的位置确定移动体2的位置。
111.此外,移动体2的标记5具有方向性。
112.由此,容易确定移动体2的位置。移动控制系统3在移动体2的检测中安装识别标记5的算法即可。因此,在移动体2的形式多样的情况下,移动控制系统3的图像处理的结构也很简单。
113.此外,移动体2的动作控制部11在根据距离检测部8检测到的距离信息判定为在前进路上存在障碍物的情况下,使躲避障碍物的躲避动作优先于从移动控制系统3输入的指令。
114.与移动控制系统3是否识别到地图数据中不存在的障碍物无关,移动体2能够躲避由距离检测部8检测到的障碍物。移动体2通过距离检测部8进行躲避动作,因此,能够与障碍物的种类无关地进行躲避动作。移动体2躲避的障碍物是移动体2的周边的障碍物,因此,移动体2不需要移动区域的地图数据。移动控制系统3不需要为了进行移动体2的躲避动作而对移动体2以外的障碍物的位置进行管理。
115.此外,移动体2具有移动体侧报知部10。移动体侧报知部10在根据距离检测部8检测到的距离信息判定为在前进路上存在障碍物的情况下,该判定持续了比预先设定的时间长的时间时,报知未能躲避障碍物。
116.在根据障碍物的形状或位置等而使移动体2很难躲避该障碍物的情况下,也报知移动体2的状况。由此,在移动体2未能躲避障碍物的情况下,例如也能够由管理者进行去除障碍物等应对。
117.另外,指令部26也可以将以使距离估计部23估计出的距离信息与移动体2检测到的距离信息的差异减小的方式进行移动的指令输出到移动体2。
118.指令部26例如在估计出的距离信息与检测到的距离信息的差异通过旋转和平移而消除时,将根据该旋转和平移进行移动的指令输出到移动体2。由此,移动体2能够更早地恢复到基于移动控制系统3的指令的路径。指令部26也可以向移动体2反复输出指令,直到估计出的距离信息与检测到的距离信息的差异消除为止。
119.此外,移动体2也可以不具有标记5。此时,位置确定部20也可以根据移动体2的形状等外观来确定移动体2的位置。在能够通过外观识别移动体2时,图像处理部17也可以通过外观来识别移动体2。
120.此外,移动体2也可以与是否位于摄像机16的拍摄范围内无关地,将移动量和距离信息发送到移动控制装置15。此时,在移动体2位于摄像机16的拍摄范围内的情况下,移动控制装置15也可以忽略从移动体2发送的移动量和距离信息。或者,移动体2也可以根据移动控制装置15的请求,将移动量和距离信息发送到移动控制装置15。移动控制装置15例如也可以在移动体2从摄像机16的拍摄范围内出去时,请求该移动体2发送移动量和距离信息。此外,移动体2也可以在躲避动作中不将距离信息输出到移动控制装置15。
121.此外,例如,指令部26也可以判定在移动体2的前进路上是否存在障碍物。指令部26例如根据估计出的距离信息与检测到的距离信息的差异是否是障碍物造成的差异,判定在移动体2的前进路上是否存在障碍物。指令部26例如在估计出的距离信息与检测到的距离信息的差异未通过旋转和平移而消除时,判定为该差异是障碍物造成的差异。指令部26也可以在判定为在移动体2的前进路上存在障碍物时,停止向移动体2输出指令。
122.此外,移动控制系统3的一部分或全部的功能可以通过一体的硬件来实现。移动控制系统3的一部分或全部的功能也可以通过多个硬件来实现。
123.接着,使用图6对移动控制系统3的硬件结构的例子进行说明。
124.图6是示出实施方式1的移动控制系统的主要部分的硬件结构的图。
125.移动控制系统3的各功能能够通过处理电路来实现。处理电路具有至少1个处理器3b和至少1个存储器3c。处理电路也可以与处理器3b和存储器3c一起或代替处理器3b和存储器3c而具有至少1个专用的硬件3a。
126.在处理电路具有处理器3b和存储器3c的情况下,移动控制系统3的各功能通过软件、固件、或软件和固件的组合来实现。软件和固件中的至少一方被记作程序。该程序存储于存储器3c。处理器3b读出并执行存储器3c中存储的程序,由此实现移动控制系统3的各功能。
127.处理器3b也称作cpu(central processing unit:中央处理单元)、处理装置、运算装置、微处理器、微计算机、dsp。存储器3c例如由ram、rom、闪存、eprom、eeprom等非易失性或易失性半导体存储器、磁盘、软盘、光盘、高密度盘、迷你盘、dvd等构成。
128.在处理电路具有专用的硬件3a的情况下,处理电路例如通过单一电路、复合电路、程序化的处理器、并行程序化的处理器、asic、fpga或它们的组合来实现。
129.移动控制系统3的各功能能够分别通过处理电路来实现。或者,移动控制系统3的各功能还能够统一通过处理电路来实现。关于移动控制系统3的各功能,也可以利用专用的硬件3a实现一部分,利用软件或固件实现另一部分。这样,处理电路通过硬件3a、软件、固件或它们的组合来实现移动控制系统3的各功能。
130.实施方式2
131.在实施方式2中,对与实施方式1公开的例子不同之处进行详细说明。关于实施方式2中未说明的特征,也可以采用实施方式1公开的例子的任意特征。
132.图7是实施方式2的移动体系统的结构图。
133.移动控制装置15具有控制系统侧报知部28。
134.控制系统侧报知部28是从移动控制系统3报知与移动体系统1有关的状况的部分。例如通过网络12向信息中心13的服务器计算机发送信息,由此,控制系统侧报知部28进行报知。信息中心13的服务器计算机例如在从控制系统侧报知部28接收信息时,向信息中心13的操作员报知该信息。控制系统侧报知部28也可以向与移动体侧报知部10不同的报知目的地进行报知。
135.指令部26判定估计出的距离信息与检测到的距离信息的差异是否是障碍物造成的差异。指令部26在判定为该差异是障碍物造成的差异的情况下,将躲避该障碍物的指令输出到移动体2。
136.移动体2根据从指令部26输入的指令躲避障碍物。
137.控制系统侧报知部28在判定为估计出的距离信息与检测到的距离信息的差异是障碍物造成的差异的情况下,该判定持续了比预先设定的时间长的时间时,报知移动体2未能躲避障碍物。
138.如以上说明的那样,在实施方式2的移动体系统1中,移动体2根据来自移动控制系统3的指令躲避障碍物。这样,移动控制系统3针对未搭载躲避障碍物的功能的单纯的移动体2,也能够进行到目标位置为止的移动控制。
139.此外,在根据障碍物的形状或位置等而使移动体2很难躲避该障碍物的情况下,也报知移动体2的状况。由此,在移动体2未能躲避障碍物的情况下,例如也能够由管理者进行去除障碍物等应对。另外,在移动体2未能躲避障碍物的情况下,指令部26也可以输出指令以从移动体2的移动体侧报知部10进行报知。
140.实施方式3
141.在实施方式3中,对与实施方式1或实施方式2公开的例子不同之处进行详细说明。关于实施方式3中未说明的特征,也可以采用实施方式1或实施方式2公开的例子的任意特征。
142.图8是示出实施方式3的移动体系统对移动体的位置的校正的例子的图。
143.在该例子中,地图数据包含移动区域中的特征点x的信息。特征点x例如是移动区域中能够与其他邻近的点进行区分的特征性的点。特征点x例如是移动区域的岔路上的点。这里,移动区域的岔路是移动区域的通路中的例如十字路、y字路、t字路或拐角等部分。此时,特征点x是岔路上的角的点。或者,特征点x例如也可以是建筑物的柱子的角等。
144.距离估计部23根据地图数据,估计位于估计位置的情况下移动体2和移动区域中的特征点x之间的距离。位置校正部24针对移动体2和特征点x之间的距离,根据由距离估计
部23估计出的距离与由距离检测部8检测到的距离的差异对估计位置进行校正。
145.如以上说明的那样,实施方式3的移动控制系统3使用移动区域中的特征点x对估计位置进行校正。特征点x在地图数据中与其他邻近的点进行区分。因此,位置校正部24能够更高精度地进行估计位置的校正。此外,通过将岔路上的点设为特征点x,移动控制系统3能够高精度地掌握岔路上的移动体2的位置。移动控制系统3针对沿着在岔路拐弯的路径移动的移动体2,也能够高精度地进行移动控制。另外,移动控制系统3也可以将多个特征点用于位置的校正。
146.实施方式4
147.在实施方式4中,对与实施方式1~实施方式3公开的例子不同之处进行详细说明。关于实施方式4中未说明的特征,也可以采用实施方式1~实施方式3公开的例子的任意特征。
148.图9是实施方式4的移动体系统的结构图。
149.移动体2具有发送机29。发送机29是发送无线信号的装置。发送机29例如发送移动体2的识别信息。发送机29例如通过小功率无线、无线lan(local area network:局域网)或无线pan(personal area network:个人局域网)等方式发送无线信号。
150.移动控制系统3具有位置确定系统30。位置确定系统30具有第2通信部18、位置确定部20和多个接收机31。
151.多个接收机31分别设置于移动区域。多个接收机31分别是接收发送机29发送的无线信号的装置。
152.位置确定部20与多个接收机31分别连接。在该例子中,位置确定部20的识别范围是多个接收机31各自的接收范围r。位置确定部20例如通过基于接收发送机29发送的无线信号的多个接收机31的3点测量等,确定移动体2的位置。这里,移动体2的位置例如可以是移动区域中的坐标。
153.第2通信部18将位置确定部20确定的移动体2的位置通过网络12发送到移动控制装置15。
154.如以上说明的那样,在实施方式4的移动体系统1中,根据发送机29和接收机31之间的无线通信来确定移动体2的位置。移动体系统1不需要用于拍摄移动体2的照明等。因此,移动体系统1的结构的自由度变高。另外,移动体系统1也可以一并使用基于无线通信的位置确定和基于摄像机16拍摄的图像的位置确定。
155.实施方式5
156.在实施方式5中,对与实施方式1~实施方式4公开的例子不同之处进行详细说明。关于实施方式5中未说明的特征,也可以采用实施方式1~实施方式4公开的例子的任意特征。
157.图10是实施方式5的移动体系统的结构图。
158.在图10中,建筑物具有进出管理系统32和电梯系统33。进出管理系统32是在建筑物的一部分或全部区域中管理利用者等的进入和退出的系统。进出管理系统32例如在区域的边界具有电子锁。电梯系统33是在建筑物的多个楼层之间输送利用者等的装置。
159.在该例子中,移动体2被分类成多个类别。移动体2的类别例如包含购物车机器人、乘用车机器人、配送机器人和清扫机器人。这里,购物车机器人例如是利用者推着进行操作
的机器人。乘用车机器人例如是利用者搭乘进行操作的机器人。这里,购物车机器人和乘用车机器人在利用者利用后被当场丢弃。然后,被丢弃的购物车机器人和乘用车机器人作为自走式机器人进行动作。清扫机器人例如是自动地清扫预先设定的区域的自走式机器人。配送机器人例如是向被指令的区域配送物品的自走式机器人。移动体2的类别的信息例如包含于标记5。
160.在该例子中,移动体2具有多个动作状态。移动体2处于多个动作状态中的任意动作状态。
161.动作控制部11根据移动体2的动作状态进行动作。多个动作状态例如包含手动控制状态、自动控制状态、待机状态和停止状态。动作状态例如根据移动体2的类别来设定。动作状态的种类和数量也可以根据移动体2的类别而不同。
162.手动控制状态是通过利用移动体2的利用者的操作而使移动体2进行动作的状态。手动移动状态也可以包含通过利用者的操作而暂时停止的状态。例如在移动体2是购物车机器人的情况下,手动移动状态是被利用者推着进行移动的状态。或者,例如在移动体2是乘用车机器人的情况下,手动移动状态是通过搭乘的利用者的驾驶而进行移动的状态。
163.自动控制状态是根据从移动控制系统3输入的指令进行动作的状态。自动控制状态也可以包含在移动体2进行移动的路径中例如根据被输入的指令而暂时停止的状态。自动控制状态也可以包含优先于被输入的指令而进行障碍物的躲避动作的状态。
164.待机状态是移动体2在待机场所停止的状态。待机场所是根据移动体2而预先设定的移动区域内的场所。待机场所是移动体2未被利用时待机的场所。待机场所例如是识别范围内的场所。
165.停止状态是移动体2与利用者的操作和移动控制系统3的指令都无关地在待机场所以外的场所停止的状态。
166.移动体2具有状态通知部34。状态通知部34是通知动作控制部11的动作状态的部分。状态通知部34例如是向利用者通知动作状态的led灯(led:light emitting diode:发光二极管)。
167.图像处理部17的标记识别部19搭载从识别到的标记5读取移动体2的类别信息的功能。
168.图像处理部17具有状态判定部35。状态判定部35是在移动体2位于识别范围内时判定移动体2的状态的部分。状态判定部35例如在状态通知部34是led灯的情况下,根据状态通知部34的发光状态判定移动体2的状态。此时,状态通知部34例如通过led灯的发光向状态判定部35通知移动体2的状态。
169.或者,状态判定部35根据摄像机16的图像中的移动体2的周围的状况判定移动体2的状态。状态判定部35例如在移动体2是购物车机器人的情况下,在摄像机16的图像中同时映出操作移动体2的利用者和移动体2时,判定为该移动体2的动作状态是手动移动状态。状态判定部35例如在移动体2是乘用车机器人的情况下,在摄像机16的图像中同时映出搭乘于移动体2的利用者和移动体2时,判定为该移动体2的动作状态是手动移动状态。状态判定部35例如在摄像机16的图像中映出停止的移动体2的状况持续预先设定的时间的情况下,判定为该移动体2的动作状态是停止状态。
170.指令部26将与移动体2的位置对应的指令输出到进出管理系统32。指令部26向进
出管理系统32输出的指令例如包含电子锁的解锁和上锁等。指令部26例如在能够认证的移动体2接近电子锁时,将解锁的指令输出到电子锁。移动控制装置15的指令部26将与移动体2的位置对应的指令输出到电梯系统33。指令部26向电梯系统33输出的指令例如包含层站呼梯的登记、轿厢门的开闭和目的地楼层的指定等。指令部26例如在移动体2接近电梯系统33的层站时,将层站呼梯和目的地楼层的指定这样的指令输出到电梯系统33。
171.移动控制装置15具有移动体数据存储部36。移动体数据存储部36是存储移动体数据的部分。移动体数据例如是包含移动体2的属性等静态数据和移动体2的动作状态等动态数据在内的数据。
172.图11是示出实施方式5的移动体系统中的移动体数据的例子的图。
173.移动体数据例如包含id(identification:标识符)、类别信息、安全协作id、电梯协作id和待机场所信息作为静态数据。id是识别移动体2的信息的例子。类别信息是表示移动体2的类别的信息。安全协作id例如是进出管理系统32中进入或退出时的认证中使用的信息。电梯协作id例如是表示许可移动体2移动的楼层的信息。待机场所信息是表示移动体2的待机场所的信息。待机场所信息例如包含待机场所的名称和待机场所的坐标。这里,待机场所的坐标也可以包含待机中的移动体2的姿态的信息。待机场所的坐标也可以按照实数值、整数值或枚举型的方式包含楼层的信息。移动体数据包含移动体2的动作状态作为动态数据。
174.移动控制系统3根据移动体2的类别,例如如下控制移动体2的移动。例如在移动体2的类别是清扫机器人的情况下,指令部26输出指令使得在移动区域中到处移动。或者,路径搜索部25例如设定从待机场所再次返回到待机场所的循环路径。此时,路径搜索部25例如设定相对于通路的行进方向在左端侧和右端侧交替移动的路径。指令部26根据路径搜索部25设定的路径,向移动体2输出进行移动的指令。例如在移动体2的类别是配送机器人的情况下,路径搜索部25设定在移动区域中以较短的路径进行移动的路径。指令部26根据路径搜索部25设定的路径,向移动体2输出进行移动的指令。
175.指令部26根据移动体2的动作状态,例如如下向移动体2输出指令。
176.在移动体2的动作状态是待机状态时,指令部26不向移动体2输出进行移动的指令。移动体2在待机场所待机。这里,移动体2例如也可以通过利用者的操作而被切换成手动控制状态。或者,例如在从利用者向移动控制系统3输入呼叫移动体2的请求的情况下,指令部26也可以输出将移动体2的动作状态切换成自动控制状态的指令。
177.在移动体2的动作状态是手动控制状态时,指令部26不向移动体2输出进行移动的指令。移动体2根据利用者的操作进行动作。这里,例如在由于移动体2的动作状态的判定延迟等而从移动控制系统3输入进行移动的指令时,移动体2使利用者的操作优先于该指令。
178.在移动体2的动作状态是自动控制状态时,指令部26将移动到目标位置的指令输出到移动体2。移动体2根据被输入的指令移动到目标位置。在该例子中,指令部26在移动体2的动作状态是自动控制状态的期间内,不变更目标位置的设定。在移动体2到达目标位置时,指令部26输出将移动体2的动作状态切换成待机状态的指令。例如路径搜索部25判定移动体2是否到达目标位置。
179.在移动体2的动作状态是停止状态时,指令部26将设定移动体2的目标位置的指令输出到移动体2。指令部26输出将移动体2的动作状态切换成自动控制状态的指令。
180.指令部26例如根据移动体数据设定目标位置。在移动体数据中登记有多个待机场所信息的情况下,指令部26例如设定从移动体2的当前位置起的路径最短的待机场所的位置作为目标位置。或者,指令部26也可以根据在待机场所待机的移动体2的数量设定目标位置。指令部26例如从图像处理部17取得待机场所的移动体2的数量。指令部26例如设定正在待机的移动体2的数量较少的待机场所的位置作为目标位置。或者,指令部26也可以根据待机场所的空闲状况设定目标位置。指令部26例如从图像处理部17取得待机场所的空闲状况的信息。指令部26例如设定空闲的待机场所的位置作为目标位置。或者,指令部26也可以通过使到待机场所为止的路径的距离、在待机场所待机的移动体2的数量和待机场所的空闲状况等具有权重的计算式来设定目标位置。
181.接着,使用图12对移动体系统1的动作的例子进行说明。
182.图12是示出实施方式5的移动体系统的动作的例子的流程图。
183.在图12中,示出移动控制系统3的动作的例子。
184.在步骤s301中,状态判定部35判定移动体2的动作状态。然后,移动控制系统3的动作进入步骤s302。
185.在步骤s302中,指令部26判定移动体2的动作状态是否是待机状态。在判定结果为“是”的情况下,移动控制系统3的动作进入步骤s301。在判定结果为“否”的情况下,移动控制系统3的动作进入步骤s303。
186.在步骤s303中,指令部26判定移动体2的动作状态是否是手动控制状态。在判定结果为“是”的情况下,移动控制系统3的动作进入步骤s301。在判定结果为“否”的情况下,移动控制系统3的动作进入步骤s304。
187.在步骤s304中,指令部26判定移动体2的动作状态是否是自动控制状态。在判定结果为“是”的情况下,移动控制系统3的动作进入步骤s307。在判定结果为“否”的情况下,移动控制系统3的动作进入步骤s305。
188.在步骤s305中,指令部26将设定目标位置的指令输出到移动体2。然后,移动控制系统3的动作进入步骤s306。
189.在步骤s306中,指令部26向移动体2输出将动作状态切换成自动控制状态的指令。然后,移动控制系统3的动作进入步骤s301。
190.在步骤s307中,路径搜索部25判定移动体2是否到达目标位置。在判定结果为“否”的情况下,移动控制系统3的动作进入步骤s301。在判定结果为“是”的情况下,移动控制系统3的动作进入步骤s308。
191.在步骤s308中,指令部26向移动体2输出将动作状态切换成待机状态的指令。然后,移动控制系统3的动作进入步骤s301。
192.如以上说明的那样,实施方式5的移动控制系统3的标记识别部19根据识别到的标记5读取移动体2的类别。
193.由此,移动控制系统3能够通过与移动体2的类别对应的指令来控制移动体2的移动。
194.此外,移动控制系统3具有状态判定部35。状态判定部35在移动体2位于识别范围内时,判定移动体2的动作状态。指令部26将与动作状态对应的指令输出到移动体2。
195.此外,移动体2的动作控制部11根据多个动作状态中的任意动作状态进行动作。多
个动作状态包含根据从移动控制系统3输入的指令进行动作的自动控制状态。
196.由此,移动控制系统3能够控制通过多个动作状态进行动作的移动体2的移动。此外,移动体2对根据从移动控制系统3输入的指令进行动作的状态和其他动作状态进行切换。由此,能够灵活地进行移动体2的移动控制。
197.此外,移动控制系统3的指令部26在移动体2的动作状态是停止状态时,将移动体2的状态设为自动控制状态。此时,指令部26设定移动体2的目标位置。此时,指令部26将向设定的目标位置移动的指令输出到移动体2。
198.由此,移动控制系统3能够将移动区域中未在移动控制系统3或利用者的控制下的移动体2引导到目标位置。
199.此外,移动控制系统3的指令部26在移动体2的动作状态是通过利用者的操作进行动作的手动控制状态时,不将进行移动的指令输出到移动体2。
200.此外,移动体2的动作控制部11在动作状态是通过利用者的操作进行动作的手动控制状态时,使利用者的操作优先于从移动控制系统3输入的指令。
201.由此,基于利用者的操作的移动体2的动作不容易被从移动控制系统3输入的指令扰乱。
202.此外,移动控制系统3的指令部26将与移动体2的位置对应的指令输出到进出管理装置。
203.此外,指令部26将与移动体2的位置对应的指令输出到电梯系统33。
204.由此,移动体2容易顺畅地在移动区域进行移动。
205.此外,移动体2具有状态通知部34。状态通知部34将动作控制部11根据多个动作状态中的哪个动作状态进行动作通知给移动控制系统3。
206.由此,移动控制系统3容易掌握移动体2的动作状态。在移动体系统1中,更加可靠地进行移动控制系统3和移动体2的协作。
207.这里,移动体2的静态数据也可以包含于移动体2的标记5。此时,移动体数据存储部36也可以仅存储移动体2的id作为静态数据。或者,标记5也可以仅存储移动体2的id。此时,移动体数据存储部36也可以存储与移动体2的id关联的移动体2的属性数据作为静态数据。
208.产业上的可利用性
209.本发明的移动控制系统能够应用于移动体的移动控制。本发明的移动体能够应用于移动体系统。本发明的移动体系统能够应用于移动体能够移动的建筑物。
210.标号说明
211.1:移动体系统;2:移动体;3:移动控制系统;4:壳体;5:标记;6:驱动部;7:移动量检测部;8:距离检测部;9:第1通信部;10:移动体侧报知部;11:动作控制部;12:网络;13:信息中心;14:摄像机系统;15:移动控制装置;16:摄像机;17:图像处理部;18:第2通信部;19:标记识别部;20:位置确定部;21:地图数据存储部;22:位置估计部;23:距离估计部;24:位置校正部;25:路径搜索部;26:指令部;27:第3通信部;28:控制系统侧报知部;29:发送机;30:位置确定系统;31:接收机;32:进出管理系统;33:电梯系统;34:状态通知部;35:状态判定部;36:移动体数据存储部;3a:硬件;3b:处理器;3c:存储器。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。