技术特征:
1.一种移动体的移动控制系统,该移动体的移动控制系统具有:地图数据存储部,其存储移动体进行移动的移动区域的地图数据;路径搜索部,其搜索从所述移动体的位置到目标位置为止的路径;指令部,其将根据所述路径搜索部搜索到的路径进行移动的指令输出到所述移动体;位置确定部,其将所述移动区域的一部分设为识别范围,在所述移动体位于所述识别范围内时,确定所述移动体的位置;位置估计部,其在所述移动体位于所述识别范围外时,根据所述位置确定部确定的所述识别范围内的位置和所述移动体检测到的所述移动体的移动量,估计所述移动体在所述识别范围外的估计位置;以及位置校正部,其根据所述地图数据和所述移动体检测到的周边物的距离信息,对所述估计位置进行校正。2.根据权利要求1所述的移动体的移动控制系统,其中,所述移动控制系统具有距离估计部,该距离估计部根据所述地图数据估计位于所述估计位置的情况下所述移动体检测到的所述距离信息。3.根据权利要求2所述的移动体的移动控制系统,其中,所述位置校正部根据所述距离估计部估计出的所述距离信息与所述移动体检测到的所述距离信息的差异,对所述估计位置进行校正。4.根据权利要求3所述的移动体的移动控制系统,其中,所述距离估计部根据所述地图数据,估计位于所述估计位置的情况下所述移动体和所述移动区域中的特征点之间的距离,所述位置校正部根据基于所述移动体检测到的所述距离信息的所述移动体和所述特征点之间的距离与所述距离估计部估计出的距离的差异,对所述估计位置进行校正。5.根据权利要求4所述的移动体的移动控制系统,其中,所述距离估计部将所述移动区域的岔路上的点设为所述特征点来估计距离,所述位置校正部将所述岔路上的点设为所述特征点对所述估计位置进行校正。6.根据权利要求2~5中的任意一项所述的移动体的移动控制系统,其中,所述指令部将以使所述距离估计部估计出的所述距离信息与所述移动体检测到的所述距离信息的差异减小的方式进行移动的指令输出到所述移动体。7.根据权利要求2~6中的任意一项所述的移动体的移动控制系统,其中,所述指令部在判定为在所述距离估计部估计出的所述距离信息与所述移动体检测到的所述距离信息之间检测到的差异是障碍物造成的差异时,将躲避所述障碍物的指令输出到所述移动体。8.根据权利要求2~7中的任意一项所述的移动体的移动控制系统,其中,所述移动控制系统具有控制系统侧报知部,该控制系统侧报知部在判定为所述距离估计部估计出的所述距离信息与所述移动体检测到的所述距离信息之间的差异是障碍物造成的差异的情况下,该判定持续了比预先设定的时间长的时间时,报知所述移动体未能躲避所述障碍物。9.根据权利要求1~8中的任意一项所述的移动体的移动控制系统,其中,所述位置确定部将对所述移动区域的一部分进行拍摄的摄像机的拍摄范围设为所述
识别范围,根据所述摄像机拍摄的图像确定所述移动体的位置。10.根据权利要求9所述的移动体的移动控制系统,其中,所述移动控制系统具有标记识别部,该标记识别部在所述摄像机拍摄的图像中识别设置于所述移动体的外表面的标记,根据识别到的所述标记读取识别所述移动体的识别信息。11.根据权利要求10所述的移动体的移动控制系统,其中,所述标记识别部在所述摄像机拍摄的图像中识别所述标记的位置,所述位置确定部根据所述标记识别部识别到的所述标记的位置确定所述移动体的位置。12.根据权利要求10或11所述的移动体的移动控制系统,其中,所述标记识别部根据识别到的所述标记读取所述移动体的类别。13.根据权利要求1~8中的任意一项所述的移动体的移动控制系统,其中,所述位置确定部具有接收来自设置于所述移动体的发送机的无线信号的接收机,将所述接收机的接收范围设为所述识别范围,基于所述发送机与所述接收机之间的无线通信确定所述移动体的位置。14.根据权利要求1~13中的任意一项所述的移动体的移动控制系统,其中,所述移动控制系统具有状态判定部,该状态判定部在所述移动体位于所述识别范围时,判定所述移动体的动作状态,所述指令部将与所述动作状态对应的指令输出到所述移动体。15.根据权利要求14所述的移动体的移动控制系统,其中,所述指令部在所述移动体的动作状态是停止状态时,将所述移动体的状态设为自动控制状态,设定所述移动体的目标位置,将向设定的目标位置移动的指令输出到所述移动体。16.根据权利要求14或15所述的移动体的移动控制系统,其中,所述指令部在所述移动体的动作状态是通过利用者的操作进行动作的手动控制状态时,不将进行移动的指令输出到所述移动体。17.根据权利要求1~16中的任意一项所述的移动体的移动控制系统,其中,所述指令部将与所述移动体的位置对应的指令输出到进出管理装置。18.根据权利要求1~17中的任意一项所述的移动体的移动控制系统,其中,所述指令部将与所述移动体的位置对应的指令输出到电梯系统。19.一种移动体,该移动体具有:驱动部,其产生在移动区域进行移动的驱动力,该移动区域的一部分包含移动控制系统的识别范围;移动量检测部,其检测所述移动区域中的移动量,向所述移动控制系统的位置估计部输出所述移动量,该位置估计部估计所述识别范围外的估计位置,作为从由所述移动控制系统的位置确定部确定的所述识别范围内的位置起的相对位置;距离检测部,其在所述移动区域中检测周边物的距离信息,向所述移动控制系统的位置校正部输出所述距离信息,该位置校正部根据所述移动区域的地图数据和所述距离信息对所述估计位置进行校正;以及动作控制部,其根据从由所述位置确定部确定的位置或由所述位置校正部校正后的位
置移动到目标位置的指令的输入,对所述驱动部的动作进行控制。20.根据权利要求19所述的移动体,其中,所述移动体具有包含识别信息的标记,该标记在所述识别范围内被所述移动控制系统识别。21.根据权利要求20所述的移动体,其中,所述标记具有方向性。22.根据权利要求19~21中的任意一项所述的移动体,其中,所述动作控制部在根据所述距离检测部检测到的所述距离信息判定为在前进路上存在障碍物的情况下,使躲避所述障碍物的躲避动作优先于从所述移动控制系统输入的指令。23.根据权利要求19~22中的任意一项所述的移动体,其中,所述移动体具有移动体侧报知部,该移动体侧报知部在根据所述距离检测部检测到的所述距离信息判定为在前进路上存在障碍物的情况下,该判定持续了比预先设定的时间长的时间时,报知未能躲避所述障碍物。24.根据权利要求19~23中的任意一项所述的移动体,其中,所述动作控制部根据多个动作状态中的任意动作状态进行动作,该多个动作状态包含根据从所述移动控制系统输入的指令进行动作的自动控制状态。25.根据权利要求24所述的移动体,其中,所述动作控制部在所述动作状态是通过利用者的操作进行动作的手动控制状态时,使所述利用者的操作优先于从所述移动控制系统输入的指令。26.根据权利要求24或25所述的移动体,其中,所述移动体具有状态通知部,该状态通知部将所述动作控制部正根据所述多个动作状态中的哪个动作状态进行动作通知给所述移动控制系统。27.一种移动体系统,该移动体系统具有:移动体,其在移动区域进行移动;以及移动控制系统,其向所述移动体输出进行移动的指令,所述移动体具有:驱动部,其产生在移动区域进行移动的驱动力;移动量检测部,其检测所述移动区域中的移动量;距离检测部,其在所述移动区域中检测当前位置的周边物的距离信息;以及动作控制部,其根据被输入的指令使所述驱动部进行动作,所述移动控制系统具有:地图数据存储部,其存储所述移动区域的地图数据;路径搜索部,其搜索从所述移动体的位置到目标位置为止的路径;指令部,其将根据所述路径搜索部搜索到的路径进行移动的指令输出到所述移动体的所述动作控制部;位置确定部,其将所述移动区域的一部分设为识别范围,在所述移动体位于所述识别范围内时,确定所述移动体的位置;位置估计部,其在所述移动体位于所述识别范围外时,根据所述位置确定部确定的所
述识别范围内的位置和所述移动量检测部检测到的所述移动量,估计所述移动体在所述识别范围外的估计位置;以及位置校正部,其根据所述地图数据和所述距离检测部检测到的所述距离信息,对所述估计位置进行校正。
技术总结
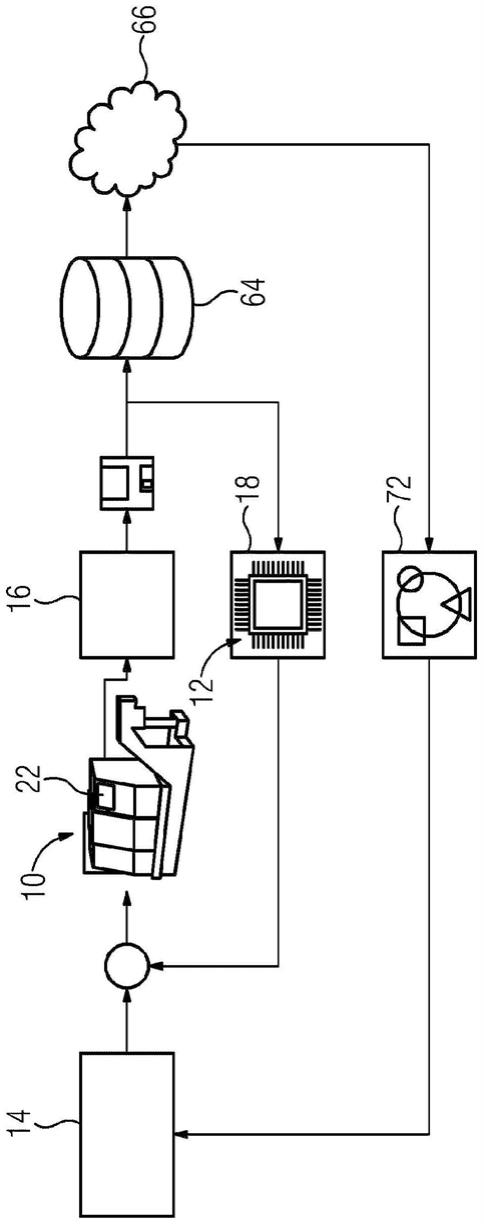
提供能够高精度地从外部控制移动体的移动的移动体的移动控制系统、该移动控制系统控制的移动体以及具有该移动控制系统和该移动体的移动体系统。移动控制系统(3)在移动体(2)位于识别范围内时,确定移动体的位置。移动控制系统(3)在移动体(2)位于识别范围外时,根据确定的识别范围内的位置和移动体(2)的移动量,估计移动体(2)在识别范围外的估计位置。移动控制系统(3)根据地图数据和周边物的距离信息对估计位置进行校正。移动体(2)检测移动体(2)的移动量和周边物的距离信息。移动控制系统(3)将根据从移动体(2)的位置到目标位置为止的路径进行移动的指令输出到移动体(2)。移动体(2)根据被输入的指令在移动区域进行移动。动。动。
技术研发人员:釜坂等 渡边启嗣 五明清司 丸田正一 根岸启吾 铃木悠太
受保护的技术使用者:三菱电机株式会社
技术研发日:2019.04.12
技术公布日:2021/11/9
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。