一种室外ar地图采集设备
技术领域
1.本实用新型涉及信息采集领域,尤其涉及一种室外ar地图采集设备。
背景技术:
2.ar地图是指用于ar增强现实应用的全息地图,该地图一般包含空间三维激光点云、空间三维全景影像点云、空间地理位置坐标信息等。ar地图的核心在于将空间地理位置信息和空间三维影像、三维点云信息的深度融合,将世界中的实体全部转化为带有颜色的三维坐标,提供给应用层设备进行定位参考。ar地图需要实地采集获得,因此采集设备的优异决定ar地图的精确性。
3.目前,关于ar地图的采集设备多数为分体式采集设备,雷达、相机等组成各自独立工作,数据汇总合并时容易出错,出现信息不完整或因存在时间差而视觉定位产生坐标偏差;分体式采集设备整体体积大、重量重,不便于人工携带进行实时移动采集数据。
技术实现要素:
4.为克服上述现有技术所述的缺陷,本实用新型提供一种室外ar地图采集设备。
5.本实用新型为解决其问题所采用的技术方案是:
6.一种室外ar地图采集设备,包括相机、激光雷达、rtk主板、rtk天线、同步板卡、imu以及用于将所述相机、激光雷达、rtk主板、rtk天线、同步板卡和imu集成在一起的刚性壳体;
7.所述刚性壳体包括底座以及内设相机和rtk天线的相机盒,所述rtk主板、同步板卡和imu固定设置于所述底座内,所述激光雷达设置于所述底座上,所述相机盒设置于激光雷达上方。
8.本实用新型提供的室外ar地图采集设备,通过刚性壳体将相机、激光雷达、rtk主板、rtk天线、同步板卡和imu集成在一起以使设备具有室外采集数据的各要素,体积小、重量轻,便于人力携带,且相机、激光雷达、rtk和imu通过同步板卡控制同步采集数据,关联性紧密,数据融合精度高,最后得到的数据完整且精度高。
9.进一步地,所述rtk天线设于相机盒顶部。
10.进一步地,所述相机包括至少三台高分辨率相机,其中一台所述高分辨率相机设置于相机盒顶部中间,其余所述高分辨率相机均匀分布设置于相机盒侧面。
11.进一步地,所述刚性壳体还包括连接件,所述底座与相机盒通过连接件连接。
12.进一步地,还包括用于背负设备的背负主体以及支撑杆;所述底座下端面设有连接座,所述支撑杆的上端与连接座连接,所述支撑杆的下端与背负主体连接。
13.进一步地,所述背负主体包括设为背负主体支架的背负板以及与背负板连接的肩带和腰带;
14.所述肩带与腰带连接,以增加背负主体在背负过程中的稳定性。
15.进一步地,所述肩带包括第一肩带以及第二肩带,所述腰带包括第一腰带以及第
二腰带;
16.所述第一肩带与第一腰带连接,所述第二肩带与第二腰带连接,且所述第一腰带与第二腰带之间锁扣连接。
17.进一步地,所述背负板一侧设有杆座,所述杆座与支撑杆的下端固定连接。
18.进一步地,所述背负板另一侧上设有接触软垫。
19.由此,通过背负主体可以人力轻松携带设备进行移动采集数据。
20.综上所述,本实用新型的一种室外ar地图采集设备,通过刚性壳体将相机、激光雷达、rtk主板、rtk天线、同步板卡和imu集成在一起以使设备具有室外采集数据的各要素,体积小、重量轻,便于人力携带,且相机、激光雷达、rtk和imu通过同步板卡控制同步采集数据,关联性紧密,数据融合精度高,最后得到的数据完整且精度高。
附图说明
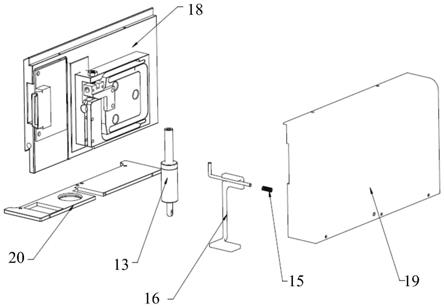
21.图1为本实用新型室外ar地图采集设备的结构示意图
22.图2为本实用新型室外ar地图采集设备另一视角的结构示意图。
23.附图标记说明:
24.1、相机;2、激光雷达;3、rtk天线;4、刚性壳体;41、底座;42、相机盒;43、外伸臂;44、连接座;5、背负主体;51、背负板;511、杆座;512、接触软垫;52、肩带;521、第一肩带;522、第二肩带;53、腰带;531、第二腰带;532、第二腰带;6、支撑杆。
具体实施方式
25.为了更好地理解和实施,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。
26.在本实用新型的描述中,需要说明的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
27.除非另有定义,本文所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。本文中在本实用新型的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在限制本实用新型。
28.实施例一
29.如图1
‑
2所示,本实用新型提供了一种室外ar地图采集设备,包括相机1、激光雷达2、rtk(实时动态定位技术)主板、rtk天线3、同步板卡、imu(惯性测量单元)以及用于将所述相机1、激光雷达2、rtk主板、rtk天线3、同步板卡和imu集成在一起以使设备具有室外采集数据的各要素的刚性壳体4;所述刚性壳体4包括底座41以及内设相机1和rtk天线3的相机盒42,所述rtk主板、同步板卡和imu固定设置于所述底座41内,所述激光雷达2设置于所述底座41上,所述相机盒42设置于激光雷达2上方。所述rtk天线3设于相机盒42顶部。各模块集成在刚性壳体4上,且相机1、激光雷达2和rtk天线之间互不干涉和遮挡,保证了全要素的空间信息采集。
30.具体的,所述相机1包括七台高分辨率相机,其中一台所述高分辨率相机设置于相
机盒42顶部中间,其余所述高分辨率相机均匀分布设置于相机盒42侧面。相机的设置可以使采集的画面不存在断裂、错位等拼接问题;采用高分辨率相机能清晰地记录室外的画面信息。
31.另外,所述刚性壳体4还包括连接件43,所述底座41与相机盒42通过连接件43连接。
32.在本实施例中,本实用新型还包括用于背负设备的背负主体5以及支撑杆6;所述底座41下端面设有连接座44,所述支撑杆6的上端与连接座44连接,所述支撑杆6的下端与背负主体5连接。所述背负主体5包括设为背负主体5支架的背负板51以及与背负板51连接的肩带52和腰带53;所述肩带52与腰带53连接,以增加背负主体5在背负过程中的稳定性。
33.具体的,所述肩带52包括第一肩带521以及第二肩带522,所述腰带53包括第一腰带531以及第一腰带532;所述第一肩带521与第一腰带531连接,所述第二肩带522与第二腰带532连接,且所述第一腰带531与第二腰带532之间锁扣连接。
34.另外,所述背负板51一侧设有杆座511,所述杆座511与支撑杆6的下端固定连接所述背负板51另一侧上设有接触软垫512,可减轻背负过程中背负板41对人体的碰撞和摩擦产生的伤害。
35.由此,通过背负主体5可以人力轻松携带设备进行移动采集数据,且在背负过程中不会脱落导致损坏设备。
36.实施例二
37.实施例二相较于实施例一的区别在于,本实施例所述相机1包括六台高分辨率相机,其中一台所述高分辨率相机设置于相机盒42顶部,其余所述高分辨率相机均匀分布设置于相机盒42侧面。减少相机盒42侧面的相机数量,便于降低后期数据合并处理的复杂程度。
38.实施例三
39.实施例二相较于实施例一的区别在于,本实施例所述相机1包括五台高分辨率相机,其中一台所述高分辨率相机设置于相机盒42顶部,其余所述高分辨率相机均匀分布设置于相机盒42侧面。减少相机盒42侧面的相机数量,便于降低后期数据合并处理的复杂程度。
40.实施例四
41.实施例二相较于实施例一的区别在于,本实施例所述相机1包括四台高分辨率相机,其中一台所述高分辨率相机设置于相机盒42顶部,其余所述高分辨率相机均匀分布设置于相机盒42侧面。减少相机盒42侧面的相机数量,便于降低后期数据合并处理的复杂程度。
42.实施例五
43.实施例二相较于实施例一的区别在于,本实施例所述相机1包括三台高分辨率相机,其中一台所述高分辨率相机设置于相机盒42顶部,其余所述高分辨率相机均匀分布设置于相机盒42侧面。减少相机盒42侧面的相机数量,便于降低后期数据合并处理的复杂程度。
44.上述实施例中,相机盒42侧面设置高分辨率相机的数量与影像数据精度成正比,与影像数据合并处理复杂程度成反比,增加高分辨率相机数量,能提得高精度影像数据,但
后期数据合并处理复杂程度增大;减少高分辨率相机数量,能降低后期数据合并处理复杂程度,但获取的影像数据精度下降。相机盒42侧面均匀设置六台高分辨率相机能获取精度高的影响数据,后期数据合并处理复杂程度小。
45.综上所述,本实用新型的一种室外ar地图采集设备,通过刚性壳体4将相机1、激光雷达2、rtk主板、rtk天线3、同步板卡和imu集成在一起以使设备具有室外采集数据的各要素,体积小、重量轻,便于人力携带,且相机1、激光雷达2、rtk和imu通过同步板卡控制同步采集数据,关联性紧密,数据融合精度高,最后得到的数据精度高且完整。
46.本实用新型方案所公开的技术手段不仅限于上述实施方式所公开的技术手段,还包括由以上技术特征任意组合所组成的技术方案。应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。