1.本发明涉及一种用于对型坯进行光学检查的装置。
2.用于制造塑料容器、特别是瓶体的生产线通常包括被构造为通过pet(聚对苯二甲酸乙二醇酯)来形成型坯的成型机以及被构造为在模具中对型坯进行吹塑来制成容器的吹塑机。一些预制件可能是有缺陷的,例如不规则的厚度、孔、气泡或者外来物体;这些缺陷必须通过快速检查来检测,从而快速地从生产线中移除缺陷型坯。
背景技术:
3.从专利文件ep2976204b1中已知一种用于对型坯进行光学检查的系统,其被构造为在型坯通过传送机朝向收集容器输送时检查型坯;该系统包括摄像机和光源,它们被设置为使得光源从后方照亮型坯并且摄像机从前方捕获每个型坯的图像。
4.在以下文件中公开了其他的检查系统:us2017/129157a1、de102006047150a1、us2018/311883a1。现有技术的光学检查系统的一种局限在于,它们将质量检查限制于摄像机可见的图像特征(例如,气泡),但是不能检测材料的内部缺陷,例如pet的聚合物链中的不规则的残余应力。
5.另外,现有技术的系统基于与储存在数据库中的其他缺陷型坯的图像之间的相似性来检测缺陷型坯。这些系统因此必须通过包含有所有需要进行检测的可行缺陷的数据库来初始化;然而,难以找到这种类型的完整且详尽的数据库,因为缺陷是多种多样的并且缺陷型坯仅构成所制造的型坯的一小部分。
6.因此,总的来说,现有技术的系统在识别缺陷型坯方面可靠性有限。
技术实现要素:
7.本公开的目的是提供一种用于对型坯进行光学检查的装置和方法,以克服现有技术的上述缺陷。本公开的另一个目的是提供一种用于对型坯的图像进行处理的方法,以克服现有技术的上述缺陷。
8.根据本公开,这些目的通过所附权利要求中表征的用于对型坯进行光学检查的装置、通过用于对型坯进行光学检查的方法以及通过用于对型坯的图像进行处理的方法完全实现。
9.更具体地,本公开涉及一种用于对型坯(或预制件)或塑料材料制成的其他物品(例如,罩或胶囊)或金属制成的其他物品(例如,盖)进行光学检查的装置;在这方面,应理解的是本说明书的参考型坯做出的剩余部分也适用于塑料或金属材料制成的其他物品。词语“型坯”用于表示制造塑料容器(例如,饮料瓶)的程序中的中间产品。更具体地,型坯通过对塑料材料进行成型(通常是注射成型或压缩成型)来形成,并且在之后的阶段中通过吹塑而膨胀,从而形成最终的容器。型坯由塑料材料制成,优选pet(聚对苯二甲酸乙二醇酯)。
10.根据本公开的用于对型坯进行光学检查的装置包括发光器。该发光器包括被构造为发出指向位于检查位置处的型坯的光束的光源。
11.在一个实施方式中,所述装置包括检查腔,其被构造为在检查位置处接收型坯。在另一个实施方式中,被构造为在检查位置处接收型坯的检查腔是除了别的之外包括所述装置的生产线的一部分。
12.所述装置包括探测器。该探测器包括摄像机。该摄像机(即,探测器)被构造为捕获位于检查位置处的型坯的图像。
13.在一个实施方式中,光源被构造为连续地发出光束。在一个实施方式中,光源是频闪仪并且被构造为以预定的发射间隔发出光束(每个发射间隔都对应于将型坯供应到检查位置所用的时间)。
14.在一个实施方式中,摄像机被构造为以预定的捕获间隔捕获图像(每个捕获间隔都对应于将型坯供应到检查位置所用的时间);如果光源是频闪仪,则发射间隔对应于(即,等于)该捕获间隔。
15.在检查位置处,型坯操作性地介于发光器与探测器之间。以这种方式,发光器从第一侧照亮型坯(例如,从前方),同时探测器从与第一侧相对的第二侧捕获型坯的图像(例如,从后方);探测器因此捕获型坯的背光图像。
16.优选地,发光器(或所述装置)包括发射偏振滤光器(或第一偏振滤光器)。该发射偏振滤光器被构造为拦截光源发出的光束。该发射偏振滤光器被构造为从光源发出的光束中产生对应的偏振光束。
17.优选地,探测器(或所述检查装置)包括接收偏振滤光器(或第二偏振滤光器)。
18.优选地,在检查位置,型坯操作性地介于发射偏振滤光器与接收偏振滤光器之间。
19.接收偏振滤光器被构造为接收偏振光束。更具体地,接收偏振滤光器被构造为接收被发射偏振滤光器偏振且被型坯折射的光束并且产生第二偏振光束。摄像机因此接收该第二偏振光束。
20.由于制成型坯的材料(优选为pet)的特征为双折射,因此当其中的聚合物链被定向且经受应力时,击打在其上的偏振光(来自第一偏振滤光器)根据基于应力而变化的折射率被折射。更具体地,击打型坯的光线被分解为在垂直的平面中振荡的两束光线,并且第二偏振器仅允许一些部分通过、使它们进入到相同的平面中并且形成干涉;因此,经受相同应力的区域将会具有相同的干涉并因此具有相同的颜色,而经受不同应力的区域将会具有不同的颜色。因此,摄像机捕获显示出表示型坯中的内部应力分布的颜色图案的图像。
21.提供的第一偏振滤光器和第二偏振滤光器被设置在平行的平面上。提供的第一偏振滤光器(或发射滤光器)是线性偏振滤光器。特别地,第一偏振滤光器(或发射滤光器)被构造为使光在第一偏振方向上偏振。提供的是型坯在处于检查位置的情况下的轴线被定向为平行于(发射滤光器的)第一偏振方向。此处“型坯的轴线”指的是型坯的中心对称轴线,型坯的侧壁围绕该轴线延伸。
22.提供的偏振滤光器(或接收滤光器)是线性偏振滤光器;第二偏振滤光器(或接收滤光器)被构造为使光在第二偏振方向上偏振。优选地,第一偏振滤光器和第二偏振滤光器都是线性偏振滤光器。在一个实施方式中,第一偏振方向和第二偏振方向彼此平行(并且,在这种情况下最终的光是白色)。在一个实施方式中,第一偏振方向和第二偏振方向彼此不同。特别地,第一偏振方向和第二偏振方向可以限定范围在5
°
与50
°
之间的角度;例如,第一偏振方向和第二偏振方向可以彼此垂直(并且,在这种情况下最终的光是黑色)。在另一个
例子中,第一偏振方向和第二偏振方向可以限定45
°
的角度。在另一个例子中,第一偏振方向和第二偏振方向可以限定30
°
的角度。在另一个例子中,第一偏振方向和第二偏振方向可以限定15
°
的角度。
23.在其他的实施方式中,第一偏振滤光器和/或第二偏振滤光器是圆形偏振滤光器。
24.在其他的实施方式中,不设置第一偏振滤光器和第二偏振滤光器,并且摄像机因此捕获型坯的单色的、背光图像(具有明暗区域)。
25.提供的型坯被单独地、即一个接一个地供应到检查位置。例如,提供的检查装置是包括被构造为沿着检查路径(其中,检查位置被限定在该检查路径内)连续地输送型坯的传送机的设备(其自身可以是本公开的主题)的一部分。该传送机可以包括吸附带,其限定了多个孔口并且被构造为与型坯的上边缘接触,从而在型坯的内腔中产生负压(即,真空)。吸附带被构造为通过所述负压来支撑型坯。吸附带被构造为沿着检查路径移动型坯,并且将它们一个接一个地定位在检查位置。发光器和发射偏振滤光器可以设置在检查路径(即,吸附带)的第一侧上;摄像机和接收偏振滤光器可以设置在检查路径(即,吸附带)的与第一侧相对的第二侧上;因此,被吸附带支撑的型坯介于发射偏振滤光器与接收偏振滤光器之间。
26.在一个实施方式中,所述装置包括处理单元。该处理单元连接至探测器。
27.处理单元包括容纳有参考数据的存储器。处理单元包括处理器,其被编程为基于参考数据对探测器捕获的图像进行处理,从而得出与型坯的缺陷有关的诊断指示。
28.在一个实施方式中,处理器可包括基于存储在存储器中的一个或多个阈值的、用于识别缺陷型坯的一个或多个标准。例如,处理器可被构造为在摄像机捕获的图像的亮度高于预定阈值的情况下(事实上,具有高亮度的图像表示具有非常薄的壁部的型坯)和/或在图像表示出高于特定阈值的急剧的颜色过渡的情况下确认缺陷型坯。
29.在一个优选的实施方式中,处理单元被构造为对探测器捕获的图像进行处理(基于参考数据),从而从所捕获的图像中得出多个图像特征的值;这种处理对图像代码进行编码(借助于根据预定的算法来转换或压缩图像,或者在自学习步骤中通过处理系统获得)。因此,处理单元被构造为向多个图像特征中的每个特征赋值。在一个实施方式中,对图像进行编码包括减小图像的尺寸(例如,多个图像特征可包括500个特征)。
30.这些图像特征代表图像。因此,处理单元被构造为从图像中提取被赋予对应的多个图像特征的多个值,并且将图像减小至图像的这些代表(或重要)值。
31.在一个实施方式中,处理单元被构造为对多个图像特征的值进行处理(基于参考数据),从而得出与型坯的缺陷有关的诊断指示。
32.在一个实施方式中,处理单元被构造为基于多个图像特征的值对图像进行分类;例如,针对每个图像特征,存储器可以包含优良(即,无缺陷的)型坯的一个或多个典型值以及缺陷型坯的一个或多个典型值,并且处理单元可被构造为在图像特征的至少一个值合理地接近(高于预定阈值)缺陷型坯的代表性典型值时和/或在图像特征的特定组合(例如,相乘)合理地接近(高于预定阈值)用于该组合的、代表缺陷型坯的参考值时将型坯确认为是有缺陷的。
33.例如,图像特征可包括是否存在特定的颜色或颜色组合和/或是否在特定点处存在特定的对称性和/或光强度;处理单元可被构造为在图像表现出特定的颜色或颜色组合或者在特定点处具有(或不具有)高于或低于阈值的特定的对称性或光强度时将型坯确认
为是有缺陷的。
34.在一个实施方式中,处理单元被构造为生成通过多个图像特征的值(并且基于参考数据)重建的图像。在一个实施方式中,处理单元被构造为通过将探测器捕获的图像与重建的图像进行比较来得出与型坯的缺陷有关的诊断指示(基于参考数据)。
35.更具体地,处理单元被构造为将探测器捕获的图像与重建图像进行比较并且得出表示探测器捕获的图像与重建图像之间的相似性的对应的相似参数。处理单元被构造为将该相似参数与预定阈值(其自身可以是参考数据的一部分)进行比较并且基于预定阈值与相似参数的比较来得出诊断指示。例如,处理单元可被构造为在相似参数高于特定的相似性阈值时将型坯确认为是优良的。因此,处理单元被构造为在重建图像足够类似于摄像机捕获的初始图像时将型坯确认为是优良的。
36.事实上,处理单元基于优良的、即无缺陷的型坯进行训练来处理图像(即,对其进行编码,从而得出多个图像特征的值并且由此生成重建图像)。处理单元可通过如下所述的自学习系统来训练,或者其可以是市场上可购买的预训练单元。如果型坯是优良的,则处理单元能够正确地处理其图像并且生成与原始图像相似的重建图像;另一方面,如果型坯是有缺陷的,则基于优良型坯训练的处理单元不能正确地重建图像并因此生成了明显与原始图像不同的重建图像。
37.因此,提供的处理单元通过单一类型(例如,无缺陷类型)的物品的样本来训练;随后,处理单元将能够在至少两种类型(例如,有缺陷类型和无缺陷类型)的物品之间进行区分。
38.在一个实施方式中,所述装置包括自学习系统。
39.在一个实施方式中,自学习系统被集成在处理单元中。在一个实施方式中,自学习系统连接至处理单元。在一个实施方式中,自学习系统连接至存储器。
40.自学习系统被构造为接收探测器针对对应的多个型坯捕获的多个图像作为输入。
41.自学习系统被构造为对探测器针对对应的多个型坯捕获的多个图像中的每个图像进行编码(基于参考数据),从而从多个图像中的每个图像中得出多个图像特征的对应值。优选地,自学习系统被构造为基于预定标准(其自身可以是参考数据的一部分)对图像进行编码。
42.自学习系统被构造为针对多个图像中的每个图像生成通过多个图像特征的对应值(并且基于参考数据)重建的对应图像。
43.自学习系统被构造为将多个图像中的每个图像与对应的重建图像进行比较,从而针对每个图像得出表示探测器捕获的图像与对应的重建图像之间的相似性的相似参数。
44.自学习系统被构造为基于相似参数来更新参考数据,使得相似参数低于预定阈值(在相似参数与图像之间的相似性成正比的情况下;反之,在相似参数与图像之间的差异成反比的情况下,使其高于预定阈值)。在一个实施方式中,预定阈值自身是参考数据的一部分。优选地,自学习系统被构造为针对多个图像中的每个图像基于相似参数来(迭代地)更新参考数据。
45.在一个优选的实施方式中,自学习系统被构造为基于相似参数和预定阈值来更新多个图像特征(优选与参考数据相结合)。更具体地,更新参考数据和/或多个图像特征从而使得针对多个图像中的每个图像相似参数都大于预定阈值(在相似参数与图像之间的相似
性成正比的情况下)。
46.另一方面,如果相似参数与图像之间的差异成正比(即,与它们的相似性成反比),则自学习系统被构造为更新参考数据和/或图像特征从而使得相似参数低于预定阈值。
47.在一个优选的实施方式中,预定标准包括多个图像特征中的最大数量(或预定数量)的图像特征(或通过其来限定)。预定标准确保了所述系统不会在不考虑型坯的缺陷的情况下简单地执行识别所捕获的图像的功能。
48.因此,在一个优选的实施方式中,自学习系统被构造为根据探测器捕获的图像来确定图像特征和参考数据二者。
49.该系统在所捕获的图像表示优良型坯时表现尤为良好;以这种方式,该系统学习如何对优良型坯的图像(即,用于对要提取的图像特征(因为它们表示优良型坯)进行编码的参考数据以及用于重建的参考数据)进行编码和重建。随后,当处理系统要对缺陷型坯进行编码和重建时,其将不能成功并且将生成与初始图像完全不同的重建图像。
50.在另一个实施方式中,预定标准包括多个图像特征(即,提取了值的特征)(或通过其来限定)。
51.在一个实施方式中,自学习系统包括分类器。该分类器被构造为基于参数对捕获的图像进行分类,该参数例如为颜色、颜色梯度、像素附近的颜色标准差、像素附近的平均颜色等等。具体地,分类器可被编程为创建表示图像中的颜色分布的直方图,并且基于所述直方图中颜色的对称性和/或均匀性对图像进行分类。在一个实施方式中,提供的是参数可被预设在分类器中(即,被明确限定)。例如,提供的分类器是“单类”式。分类器可被构造为在多个预设的参数中选择要在检查过程中使用的一个或多个参数(这种选择可通过分类器在学习阶段中执行)。
52.在一个实施方式中,分类器是决策分支。特别地,提供的“单类”分类器是“随机森林”式决策分支。已观察到,这些分类器可以(仅仅)通过没有任何缺陷的物品的图像来进行训练(因为分类器属于“单类”类型)。
53.在一个优选的实施方式中,自学习系统包括神经网络。特别地,自学习系统可包括卷积神经网络。
[0054]“卷积神经网络”指的是被构造为通过与一系列的池化步骤交替的一系列的卷积步骤得出多个图像特征的值而对图像进行编码的神经网络。在卷积步骤中,卷积过滤器(其值是参考数据的一部分)被应用于图像(即,应用于表示图像的每种颜色的像素矩阵),从而得出转换后的图像;在池化步骤中,转换后的图像的尺寸例如通过相邻像素之间的最大化或最小化或平均数学运算而被减小。卷积步骤和池化步骤因此用于获得多个图像特征的值。
[0055]
在一个实施方式中,神经网络被预训练,以提取(即,得出)多个图像特征的值;在一个实施方式中,神经网络可包括被构造为在图像中识别对象(例如,基于数据集“imagenet”)的已知的神经网络(或它们的部分)。
[0056]
在一个实施方式中,卷积神经网络被构造为基于多个图像特征的值与参考值(其形成参考数据的一部分)的比较来对图像进行分类。在一个实施方式中,图像被分类为表示优良型坯或缺陷型坯;在另一个实施方式中,图像被分类为表示优良型坯或具有特定缺陷的型坯。在一个实施方式中,神经网络包括“异常检测”分类器或“全连接”网络,以基于多个
图像特征的值对图像进行分类。例如,为了进行提取(即,得出图像特征的值),使用了基于例如“imagenet”的数据集的已知网络的一部分(该网络包括卷积和池化(因此是预训练的网络)),并且为了对图像进行分类,使用了“全连接”网络,其通过自学习系统(优选具有优良型坯的例子和缺陷型坯的例子)进行训练并且能够基于图像特征的值将优良型坯和缺陷型坯区分开。
[0057]
在一个实施方式中,学习系统包括称为“生成式对抗网络(gan)”的神经网络类型;生成式对抗网络包括生成器和鉴别器;生成器使用多个图像特征的值(通过卷积步骤从探测器捕获的实际图像中获得)来生成对应的重建图像并且将其传送到鉴别器;鉴别器尝试鉴别其接收到的图像是实际的(即,由探测器捕获的)还是重建的,并且将反馈结果发送给生成器;基于来自鉴别器的反馈结果,生成器学会生成与实际图像尽可能相似的重建图像(使得鉴别器将会把它们认作为是实际的)。在训练期间,gan优选接收优良型坯的图像;因此,当处理系统使用自学习系统所确定的参考数据(以及图像特征)来检查型坯时,鉴别器仅将与缺陷型坯有关的那些图像鉴定为重建图像。
[0058]
在一个优选的实施方式中,自学习系统包括“自编码器”卷积神经网络。在一个实施方式中,参考数据包括第一参考数据集和第二参考数据集。第一参考数据集与一系列的卷积步骤相关(例如,其包括多个卷积过滤器);第二参考数据集与一系列的上采样步骤相关。特别地,第二参考数据集可以与一系列的去卷积步骤相关(例如,其包括多个去卷积过滤器)。
[0059]
自编码器神经网络被构造为基于与一系列的卷积步骤相关的第一参考数据集从图像中提取(即,得出)多个参考特征的值,并且基于与一系列的去卷积步骤相关的第二参考数据集使用多个图像特征的值来重建图像(即,生成重建图像)。
[0060]
在包括自编码器网络的所述实施方式中,学习系统被构造为接收优良型坯的多个图像作为输入,以基于第一参考数据集从其中得出图像特征的对应值;学习系统被构造为使用图像特征的值并且基于与去卷积步骤相关的第二参考数据集来生成多个重建图像;最后,自学习系统被构造为将多个重建图像与对应的多个原始图像进行比较并且更新参考数据(具体地为第一参考数据集或第二参考数据集或第一参考数据集和第二参考数据集的组合),从而使探测器捕获的原始图像与对应的重建图像之间的差异最小化。更具体地,在一个实施方式中,自学习系统被构造为针对每个图像得出相似参数(例如,通过以下一个函数或以下两个以上的函数的组合计算出:norm i1、norm i2、“ssim”结构相似性指数、“psnr”峰值信噪比、“haarpsi”基于哈尔小波的感知相似性指数),并且在相似参数与图像之间的差异成正比时使相似参数最小化(即,使其低于特定阈值),或者相反地在相似参数与图像之间的相似性成正比时使其最大化(即,使其高于特定阈值)。在包括自编码器网络的所述实施方式中,学习系统被构造为结合第一参考数据集和第二参考数据集来更新网络的过滤器(因此更新多个图像特征),从而确认最好地表示无缺陷型坯的图像的图像特征并且共同地确认用于得到这些图像特征的卷积步骤以及用于生成使用这些图像特征的重建图像的去卷积步骤。优选地,自学习系统包括自编码器网络,其在对图像进行编码时受到至少一个预定标准(即,限制条件)的限制;例如,该标准可以涉及可针对多个图像特征被识别出的最大数量的图像特征。因此,在实践中,编码操作包括压缩图像。
[0061]
因此,在一个实施方式中,自学习系统被构造为学习被处理系统随后用来检查型
坯的参考数据和图像特征。在包括自编码器网络的所述实施方式中,自学习系统通过优良的(无缺陷的)多个型坯进行训练;因此,自学习系统确定用于正确地重建优良型坯的图像(即,在探测器捕获的图像与对应的重建图像之间具有高度的相似性)的参考数据和图像特征;当将这些参考数据和图像特征应用于缺陷型坯时,重建图像明显与所捕获的对应图像不同并且处理系统在将它们进行比较时将型坯确认为是有缺陷的。
[0062]
已观察到,在网络学习(或训练)的过程中和检查的过程中都执行所捕获的图像与重建图像之间的比较;用于训练的相似参数可以与将在检查过程中使用的相似参数不同。特别地,优选在检查过程中而不是训练过程中使用“psnr”、“haarpsi”函数。例如,提供的是针对训练使用“ssim”函数或norm i1函数或norm i2函数,并且针对检查使用“psnr”函数或“haarpsi”函数。
[0063]
优选地,自学习系统(或处理系统)包括负责对图像进行编码以得出图像特征的值的第一神经(子)网络以及负责对图像特征的值进行解码以重建图像的第二神经(子)网络;第一神经(子)网络和第二神经(子)网络共同地经受训练。第一神经(子)网络和第二神经(子)网络可以是单一的神经网络的部分。
[0064]
本公开还提供了一种用于通过热塑材料制造容器的生产线。
[0065]
在一个实施方式中,生产线包括被构造为制造型坯的成型机。在一个实施方式中,成型机是注射成型机。在一个实施方式中,成型机是压缩成型机(其可以是旋转式机械)。
[0066]
在一个实施方式中,生产线包括用于加热和/或冷却型坯的热调节单元。为了便于说明,该热调节单元在下文中称为“加热炉”,但不会因此而限制本公开的范围。加热炉被构造为接收成型机中送出的型坯并且配备有用于加热型坯的加热装置。
[0067]
在一个实施方式中,生产线包括吹塑机,其被构造为接收型坯并且在模具中对它们进行吹塑从而制成容器。优选地,吹塑机被构造为接收在加热炉中加热后的型坯。该炉可以集成在吹塑机中。
[0068]
在一个实施方式中,吹塑机和型坯成型机可位于不同的生产线中(甚至被安装在单独的工厂中),它们联合地工作来制成热塑材料的容器:事实上,成型机制造的型坯被送到包括吹塑机的生产线中。炉优选在包括吹塑机的生产线中被集成在吹塑机的上游,以在对型坯进行吹塑之前对它们进行加热。
[0069]
在一个实施方式中,生产线包括用于接收和储存型坯的储存单元(其可以是自动化的);储存单元被构造为从成型机接收型坯并且将它们送至吹塑机或炉。
[0070]
在一个实施方式中,生产线包括根据本公开的一个或多个方面的用于对型坯进行光学检查的装置。该光学检查装置在生产线中位于成型机的下游。该光学检查装置在生产线中位于吹塑机的上游。在一个实施方式中,该光学检查装置位于成型机的下游和炉的上游。在一个实施方式中,该光学检查装置位于炉的下游和吹塑机的上游。使该装置位于吹塑机的上游允许在缺陷型坯在吹塑过程中由于其异常的应力分布而爆炸之前对其进行识别。在一个实施方式中,光学检查装置可以定位在储存单元中或定位在将储存单元连接至生产线的其他部分的传送机上。
[0071]
在一个实施方式中,光学检查装置在生产线上被定位为在30与70摄氏度之间(优选50与60摄氏度之间)的温度下检查型坯。例如,型坯可以在它们离开成型机时处于这种温度下。
[0072]
在一个实施方式中,光学检查装置在生产线上被定位为在环境温度下(例如,在5与30摄氏度之间)检查型坯。型坯可以在它们在成型后被储存或冷却以处于环境温度下。
[0073]
优选地,光学检查装置在生产线上被定位为在低于60摄氏度(优选低于50摄氏度)的温度下检查型坯;事实上,在更高的温度下,型坯可能会发生形变,这会改变它们的应力分布。
[0074]
在一个实施方式中,光学检查装置被集成在炉中。如果光学检查装置被集成在炉中(优选位于加热器的上游,即位于炉的入口处),则能够单独地或按序地利用型坯在炉内的定位。
[0075]
在其他实施方式中,根据本公开的光学检查装置位于生产线之外,被集成在高速查看机或低速采样机中。
[0076]
本公开还涉及一种用于对型坯进行光学检查的方法。该光学检查方法包括通过发光器发出指向位于检查位置处的型坯的光束的步骤。该光学检查方法包括通过探测器捕获位于检查位置处的型坯的图像的步骤。在检查位置,型坯操作性地介于发光器与探测器之间。因此,所捕获的图像是背光图像。
[0077]
在一个实施方式中,光学检查方法包括通过在介于发光器与型坯之间的发射偏振滤光器上拦截发光器发出的光束来产生偏振光束的步骤。
[0078]
在一个实施方式中,光学检查方法包括在接收偏振滤光器上接收偏振光束的步骤。在检查位置,型坯操作性地介于发射偏振滤光器与接收偏振滤光器之间。
[0079]
在一个实施方式中,型坯由包含聚合物链(优选pet)的材料制成。在一个实施方式中,探测器捕获的图像包括表示pet的聚合物链经受的应力的颜色图案。
[0080]
在一个实施方式中,光学检查方法包括对图像进行处理的步骤(使用处理系统)。在一个实施方式中,在该处理步骤中,探测器捕获的图像基于存储器中包含的参考数据进行处理。在一个实施方式中,该处理步骤包括得出与型坯的缺陷有关的诊断指示。
[0081]
在一个实施方式中,处理步骤包括基于参考数据对探测器捕获的图像进行编码的子步骤,从而从图像中得出多个图像特征的值。
[0082]
在一个实施方式中,处理步骤包括对多个图像特征进行处理从而得出与型坯的缺陷有关的诊断指示的步骤。更具体地,在一个实施方式中,处理步骤包括生成通过多个图像特征的值并且基于参考数据重建的图像的子步骤。在一个实施方式中,处理步骤包括通过将探测器捕获的图像与重建图像进行比较来得出与型坯的缺陷有关的诊断指示的子步骤。
[0083]
在一个实施方式中,所述方法包括自学习步骤(通过连接至处理系统的自学习系统来执行)。在一个实施方式中,自学习步骤包括针对对应的多个型坯捕获多个图像的子步骤。在一个实施方式中,自学习步骤包括基于参考数据对多个图像中的每个图像进行编码的子步骤,包括从多个图像中的每个图像中得出多个图像特征的基于预定标准(其可包括对多个图像特征中的最大数量的图像特征的限制条件)的对应值。在一个实施方式中,自学习步骤包括针对多个图像中的每个图像生成通过多个图像特征的对应值并且基于参考数据重建的对应图像的子步骤。在一个实施方式中,自学习步骤包括将多个图像中的每个图像与对应的重建图像进行比较并且得出表示探测器捕获的图像与对应的重建图像之间的相似性的对应的相似参数的子步骤。在一个实施方式中,自学习步骤包括基于相似参数和预定的阈值来更新参考数据和/或多个图像特征的子步骤。更具体地,参考数据和多个图像
特征被更新为使得相似参数低于(或高于)预定的阈值。
[0084]
在一个实施方式中,摄像机在自学习步骤期间捕获的多个图像中的图像表示对应的多个无缺陷型坯。使自学习系统无需接收缺陷型坯的图像作为输入是十分有利的,因为难以找到缺陷型坯。
[0085]
优选地,发射偏振滤光器和接收偏振滤光器根据与自学习步骤和处理步骤相同的预定取向(例如,平行或垂直)相对于彼此定向。
[0086]
在一个实施方式中,所述方法包括一次一个地(连续地)将多个型坯中的型坯供应到检查位置的步骤。在一个实施方式中,根据相对于发射偏振滤光器以及相对于接收偏振滤光器的预定的取向供应型坯。该取向与自学习步骤和处理步骤中的相同。当型坯位于检查位置时捕获多个型坯中的每个型坯的图像。
[0087]
在一个实施方式中,处理器被构造为对随机定向的图像进行处理(例如,使它们旋转从而将它们设置为预定的取向);因此,在一个实施方式中,所述装置对于型坯的取向是不变的。
[0088]
在一个实施方式中,处理系统被构造为实时地(在捕获图像后立即)处理型坯的图像。在一个实施方式中,当所述装置提供将型坯确认为是有缺陷的诊断指示时,生产线被构造为为了允许操作者移除缺陷型坯而停止或其自身移除缺陷型坯。
[0089]
在另一个实施方式中,处理系统被构造为捕获型坯的图像,从而以后处理模式对其进行处理。在这种情况下,系统被构造为将每个图像与相应的型坯关联,从而能够识别出图像表现出缺陷型坯的诊断指示的型坯。
[0090]
本公开还涉及一种用于对型坯的图像进行处理的方法。在一个实施方式中,该图像处理方法包括对图像进行编码的步骤,包括得出多个图像特征的值。在一个实施方式中,该图像处理方法包括基于多个图像特征来生成重建图像的步骤。在一个实施方式中,该图像处理方法包括通过将摄像机捕获的图像与重建图像进行比较来得出与型坯的缺陷有关的诊断指示的步骤。
[0091]
在一个实施方式中,图像处理方法包括自学习步骤(根据本公开所述的一个或多个方面)。
[0092]
本公开还涉及一种计算机程序(软件),其包括被构造为(在通过处理器、特别是根据本公开所述的一个或多个方面的装置的处理单元运行时)执行根据本公开所述的一个或多个方面的处理方法的步骤的操作指令。
附图说明
[0093]
通过在附图中以非限制性举例的方式示出的优选实施方式的以下详细说明,所述的和其他的特征将变得更清楚,其中:
[0094]
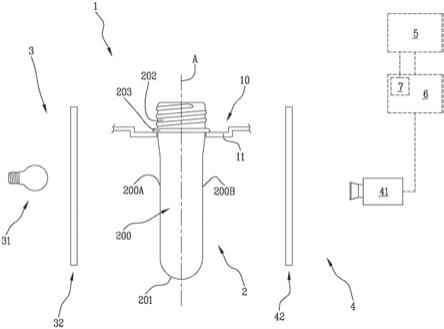
图1示出了根据本公开的光学检查装置;
[0095]
图2表示图1的光学检查装置对图像执行的处理;
[0096]
图3表示通过图1的光学检查装置在图像上执行的自学习程序;
[0097]
图4a、4b和4c分别示出了针对无缺陷的型坯的摄像机捕获的图像、重建图像以及所捕获的图像与重建图像之间的比较;
[0098]
图5a、5b和5c分别示出了针对缺陷型坯的摄像机捕获的图像、重建图像以及所捕
获的图像与重建图像之间的比较;
[0099]
图6表示包括图1的装置的用于制造热塑材料容器的生产线。
具体实施方式
[0100]
参考附图,附图标记1表示被构造为对型坯2进行检查的光学检查装置。
[0101]
型坯2包括主体200,其基本上是圆柱形形状。型坯2(或主体200)限定了对称轴线a。主体200因此关于对称轴线a圆柱对称。型坯2包括封闭的底部201。型坯2包括限定了开口的颈部202。型坯2包括环203。
[0102]
装置1被构造为在检查位置10处接收型坯2。在一个实施方式中,检查位置由检查腔限定。在一个实施方式中,检查腔包括支撑元件11,其被构造为(优选通过对环203进行支撑而)保持型坯2。
[0103]
装置1包括发光器3。发光器3包括光源31。光源31被构造为发出指向型坯2(即,指向检查位置10)的光束。发光器3包括发射偏振滤光器32。在一个实施方式中,发射偏振滤光器32连接至光源31。发射偏振滤光器32被构造为拦截光源31发出的光束并且使其偏振。因此,型坯2接收来自发射偏振滤光器32的偏振光束并且使其折射。
[0104]
装置1包括探测器4。探测器4包括摄像机41。探测器包括接收偏振滤光器42。在一个实施方式中,接收偏振滤光器42连接至摄像机41。接收偏振滤光器42被构造为接收型坯2折射的光束并且使其偏振。因此,摄像机41接收通过发射偏振滤光器32偏振的、通过型坯折射的并且进一步通过接收偏振滤光器42偏振的光束。摄像机41被构造为捕获(或获取)型坯2的图像20。
[0105]
发光器3在主体200的第一侧200a上横向地照亮型坯2。探测器4在主体200的与第一侧200a相对的第二侧200b上捕获型坯2的横向图像。
[0106]
装置1包括存储器5。存储器5包含有参考数据。更具体地,存储器5至少包含有第一参考数据集51和第二参考数据集52;在一个实施方式中,第一参考数据集51和第二参考数据集52彼此不同。
[0107]
装置1包括处理器6。处理器6连接至存储器5。处理器6被编程为基于参考数据集51、52来处理摄像机41捕获的图像20,从而得出与型坯2的缺陷有关的诊断指示23。更具体地,处理器6被编程为执行基于第一参考数据集51对图像20进行编码的步骤61,从而得出多个图像特征21的值。处理器6还被构造为执行基于第二参考数据集52对图像特征21进行解码的步骤62,从而生成重建图像22。
[0108]
处理器6随后被构造为执行将重建图像20与捕获的图像22进行比较的步骤63,以得出与型坯2的缺陷有关的诊断指示23。
[0109]
在一个实施方式中,诊断指示包括捕获的图像20与重建图像22之间(或相反地)的差异所给出的误差图25。在图中示出的一个实施方式中,误差图25在型坯优良时表现出均匀着色或者在型坯有缺陷时表现出拼补着色。
[0110]
在一个实施方式中,诊断指示23包括相似参数24,其值和捕获的图像20与重建图像22之间的相似度有关。在一个实施方式中,处理器6被编程为基于误差图25来得出相似参数24。在一个实施方式中,诊断指示23包括二进制参数值,其表示型坯是优良的还是有缺陷的(例如,通过将相似参数24与预定的阈值相比较来计算)。
[0111]
在一个实施方式中,装置1(或者优选处理系统)包括自学习系统7。自学习系统7优选被集成在处理器6中。自学习系统7连接至存储器5。
[0112]
自学习系统7被构造为接收针对多个对应的型坯2捕获的多个图像20。自学习系统7优选被构造为针对其接收的每个图像20执行以下步骤:步骤61,基于第一参考数据集51对图像20进行编码,以得出多个图像特征21;步骤62,基于第二参考数据集51对图像特征21进行解码,以生成重建图像22;步骤63,将重建图像22与捕获的图像20进行比较,以得出表示捕获的图像20与重建图像22之间的相似性的相似参数24;步骤70,相对于用于相似参数24的预定的阈值72来评估该相似参数;(迭代地)更新第一参考数据集51、第二参考数据集52和图像特征21,直到相似参数24高于(或低于)阈值参数72为止。
[0113]
因此,自学习系统7解决了对编码操作61和解码操作62进行优化的问题,其中变量通过第一参考数据集51和第二参考数据集52(并且在必要时通过成组的图像特征21)来限定,从而使相似参数24最小化,即,使其低于特定阈值(或使其最大化,即,使其高于特定阈值)。因此,优选地,第一参考数据集51和第二参考数据集52联合地更新。
[0114]
由于自学习系统7通过优良型坯2的图像20优化了编码操作61和解码操作62,因此被确定为优化的结果的参考数据集51、52(并且在必要时成组的图像特征21)针对优良型坯2使得捕获的图像20与重建图像22之间的差异最小化。另一方面,由于这些操作没有针对缺陷型坯2被优化,因此针对缺陷型坯的重建图像22明显不同于捕获的图像20,并且处理器6(已知这种差异)生成表示该型坯存在缺陷的诊断指示23。
[0115]
优选地,编码步骤61、解码步骤62、比较步骤63、评估步骤70以及更新参考数据集51、52(并且在必要时更新图像特征21)的步骤针对每个连续的图像20通过自学习系统7迭代地执行(即,对于使相似参数24最小化或最大化所必需的所有迭代都首先针对第一型坯2来执行,然后针对第二型坯2来执行,并且以此类推)。在一个实施方式中,自学习系统还可执行第一迭代,其中其针对所有的图像20执行编码步骤61、解码步骤62、比较步骤63和评估步骤70;随后,从针对所有型坯2获得的相似参数24开始,其更新参考数据集51、52(并且在必要时更新图像特征21)并且继续执行第二迭代,其中其再次针对所有的图像20执行编码步骤61、解码步骤62、比较步骤63和评估步骤70,并且以此类推。
[0116]
本公开还涉及一种用于制造热塑材料的容器(例如,瓶)的生产线100。
[0117]
生产线100包括成型机101,其被构造为用于制造(即,成型)型坯2。在一个实施方式中,成型机101是旋转式机械。生产线100还包括加热炉102,其被构造为接收成型的型坯2并且对它们进行加热。生产线100包括吹塑机103,其被构造为对型坯2进行吹塑,以制成容器。在一个实施方式中,吹塑机103是旋转式机械。
[0118]
优选地,生产线100包括第一传送转盘106,其被构造为将型坯2从成型机101送至加热炉102。优选地,生产线100包括第二传送转盘107,其被构造为将型坯2从加热炉102送至吹塑机103。在一个实施方式中,生产线100包括储存单元104,其用于在成型的型坯2进行吹塑之前对它们进行储存。在一个实施方式中,生产线100包括型坯定向装置105,其被构造为对离开和/或进入储存单元104的型坯2进行定向。在一个实施方式中,生产线100包括传送机108,其被构造为输送型坯2进入和/或离开储存单元104。传送机108将型坯2从储存单元104送至加热炉102。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。