1.本实用新型涉及工业机器人拆装实训考核的技术领域,特别涉及一种面向工程实训教学的工业机器人拆装实训考核装置。
背景技术:
2.社会的发展日新月异,对制造速度和制造质量的要求越来越高,工业机器人的使用日益广泛,对工业机器人技术人才的需求更加迫切。这就需要高校加速推进工业机器人方向的高级复合型人才的培养,对人才规模、效率和质量提出了更高要求,需重视对学生工业机器人实训操作能力的培养,尤其是对学生亲自动手拆卸工业机器人能力进行培训和考核,实现“通过拆卸熟悉结构,通过熟悉结构了解设计”的实训目标,因此高效急需一种接近工业实际工况,又方便工程实训教学使用的工业机器人拆装实训考核装置,现有技术缺少这样的装置。
技术实现要素:
3.本实用新型的目的在于提供一种面向工程实训教学的工业机器人拆装实训考核装置,以解决上述问题。
4.为实现上述目的,本实用新型采用以下技术方案:
5.一种面向工程实训教学的工业机器人拆装实训考核装置,包括实训操作平台、工具收纳模块、零件存放模块、图纸展示模块、电控拆装模块和机器人旋转模块;零件存放模块固定安装在实训操作平台上,工具收纳模块与图纸展示模块分别安装于实训操作平台两端,机器人旋转模块安装于实训操作平台中心部位,实训操作平台的边缘设置有滑轨,电控拆装模块安装实训操作平台的滑轨上。
6.进一步的,工具收纳模块为工具收纳板,通过螺栓固定连接在实训操作平台上。
7.进一步的,零件存放模块安放于实训操作平台内,零件存放模块底部设置有重量传感器。
8.进一步的,图纸展示模块包括立柱、图纸展板和照明装置,图纸展板的一端铰接安装在立柱上,照明装置固定在图纸展板上边缘。
9.进一步的,电控拆装模块包括滑块、立臂和悬臂,滑块安装在实训操作平台上的滑轨上,立臂安装在滑块上,悬臂安装在立臂上。
10.进一步的,悬臂上沿轴向设置有丝杠,丝杠连接到丝杠电机;丝杠上螺纹套设有移动平台,移动平台上并排设置有吊取电机和绞轮,吊取电机的输出端,以及绞轮端部均设置有带轮,两个带轮之间通过皮带连接。
11.进一步的,绞轮上缠绕有钢丝,钢丝的端部设置有电磁铁。
12.进一步的,机器人旋转模块包括止推轴承和托盘;托盘安装在止推轴承上,其上安装相应的工业机器人。
13.与现有技术相比,本实用新型有以下技术效果:
14.本实用新型提供的工业机器人,采用简单的连接方式,所述连接方式主要采用螺栓连接或直接无连接件连接,将实训考核系统的各部分模块进行组装,简化实训考核系统的拆卸与安装过程。
15.本实用新型提供的面向工程实训教学的工业机器人拆装实训考核装置,其工装收纳模块,可便捷的收纳不同类型、不同种类的工装。
16.本实用新型提供的面向工程实训教学的工业机器人拆装实训考核装置,其工装收纳模块,可通过重量检测对学院拆装工业机器人步骤进行检测;
17.本实用新型提供的面向工程实训教学的工业机器人拆装实训考核装置,其零件存放模块,可根据不同的工业机器人进行更换,并通过零件重量检测对学员拆装工业机器人的步骤进行检测,考核学员是否拆装正确。
18.本实用新型提供的面向工程实训教学的工业机器人拆装实训考核装置,其图纸展示模块,可直观展示学员所需学习资料,若学员拆装步骤出错,则照明系统进行提示。
19.本实用新型提供的面向工程实训教学的工业机器人拆装实训考核装置,其机器人旋转模块,可通过更换托盘,换装各种不同类型的工业机器人。
20.本实用新型提供的面向工程实训教学的工业机器人拆装实训考核装置,其电控拆装模块,可进行三自由度移动,并且其通过电磁铁吊取拆装零件,不受限于零件形状,更加便捷实用。
21.本实用新型提供的面向工程实训教学的工业机器人拆装实训考核装置,主要针对于面向工程实训教学的工业机器人拆装实训考核装置庞大的身躯,根据模块分解,便于工业机器人的移动和维修,模块化的设计,方便面向工程实训教学的工业机器人拆装实训考核装置出现故障通过更换模块,节省维修时间,同时模块的标准、统一化对于实训考核系统的使用和更便捷快速。多功能的设计可以方便面向工程实训教学的工业机器人拆装实训考核装置适用于更多种类的工业机器人,无需购买各类功能的实训考核系统,通过更换零件存放模块便可以进行实训考核。提高了面向工程实训教学的工业机器人拆装实训考核装置的使用效率,更加方便的为学员提供学习资源。
附图说明
22.图1为本实用新型实例提供的工业机器人拆装实训系统结构图;
23.图2为本实用新型实例提供的工业机器人拆装实训系统图纸展示模块结构图;
24.图3为本实用新型实例提供的工业机器人拆装实训系统电控拆装模块结构图;
25.图4为本实用新型实例提供的工业机器人拆装实训系统机器人旋转模块结构图;
26.其中,1实训操作平台;2工装收纳模块;3零件存放模块;4图纸展示模块;5机器人旋转模块;6电控拆装模块;401图纸展板;402图纸立柱;403照明系统;501滑块;502立臂;503悬臂;504丝杆;505移动平台;506吊取电机;507带轮;508绞轮;509 钢丝;510电磁铁;601工业机器人;602托盘;603止推轴承。
具体实施方式
27.下面将参考附图并结合实施例来详细说明本实用新型。需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。
28.以下详细说明均是示例性的说明,旨在对本实用新型提供进一步的详细说明。除非另有指明,本实用新型所采用的所有技术术语与本技术所属领域的一般技术人员的通常理解的含义相同。本实用新型所使用的术语仅是为了描述具体实施方式,而并非意图限制根据本实用新型的示例性实施方式。
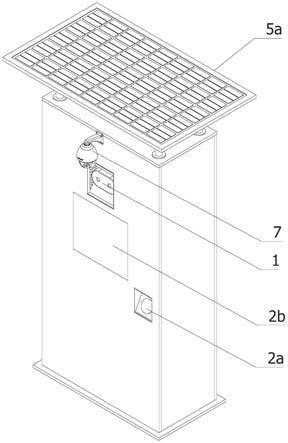
29.如图1所示,一种面向工程实训教学的工业机器人拆装实训考核装置,包括:实训操作平台1、工装收纳模块2、零件存放模块3、图纸展示模块4、电控拆装模块5、机器人旋转模块6;
30.所述面向工程实训教学的工业机器人拆装实训考核装置零件存放模块2固定安装在实训操作平台1上,所述工具收纳模块2与图纸展示模块4分别安装于实训操作平台1两端,机器人旋转模块6安装于实训操作平台1中心部位,可根据实际情况将机器人进行旋转,电控拆装模块5安装实训操作平台1表面滑轨上,可根据需要进行滑动。所述机器人各模块共同运转下辅助学员进行工业机器人拆装学习。
31.如图1所示,所述的工装收纳模块2,其上均与分布有挂钩,可便捷地存取各种工装;进一步的,所述的实训操作平台1上固定安装有所述零件收纳模块2,具体的,零件收纳模块2为可更换的与工业机器人配套的收纳盒,可应用于不同工业机器人,进一步的,每个零件收纳盒可对盒内零件重量进行检测,以考核学员是否正确拆装;
32.如图2所示,所述的图纸展示模块4:包括图纸展板401可旋转的固定于支架402 上,进一步的,图纸展板401上安装有照明灯403,对图纸进行照明,若学员拆装步骤出错,则照明灯闪烁进行提示。
33.如图3所示,所述的电控拆装模块5可滑动的安装在实训操作平台1上,具体的,立臂502通过螺栓固定安装在两块相同滑块501上,滑块501包含有两个滑轮,可在实训操作平台上所开的滑槽中自由滑动;立臂502上固定安装有悬臂503,悬臂503内部装有丝杆504、移动平台505,可控制移动平台进行轴线运动,进一步的,移动平台505上安装吊取电机506、带轮507、绞轮508,吊取电机506与小带轮相连,绞轮508与大带轮相连,吊取电机506通过带动带轮507旋转,进而带动绞轮508旋转,可以提供一定的减速比并可以防止学员误操作损坏系统,绞轮508上绕有钢丝509,钢丝末端有电磁铁 510,可通过立臂上的按钮进行控制,以吊取拆卸的零件;
34.如图4所示,所述的机器人旋转模块6包括工业机器人601、与工业机器人配套的托盘602、止推轴承603,所述工业机器人601通过螺栓固定安装在托盘602上,并一齐安装在止推轴承603上,可完成机器人的旋转功能。
35.本实用新型实施例提供的一种面向工程实训教学的工业机器人拆装实训考核装置,各模块可进行拆卸,安装较为简单,并且有良好的互换性;模块化设计,可快速更换不同机器人配套的模块,使得系统有较好的柔性,工作范围大。
36.由技术常识可知,本实用新型可以通过其它的不脱离其实质或必要特征的实施方案来实现。因此,上述公开的实施方案,就各方面而言,都只是举例说明,并不是仅有的。所有在本实用新型范围内或在等同于本实用新型的范围内的改变均被本实用新型包含。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。