1.本发明涉及水果采摘技术,特别是一种多簇猕猴桃间隙分送柔性弯折采摘装置及方法。
背景技术:
2.猕猴桃果实营养丰富、风味独特,被誉为“水果之王”。中国是世界猕猴桃最大的生产国家,种植面积广泛,产业价值持续提升,具有较高的经济效益,并且成为主产经营果品中收益最高的水果,则猕猴桃生产是一个潜力巨大的朝阳产业,具有非常广阔的发展潜力。
3.猕猴桃采摘是其生产过程中最费时费力的环节,目前主要依靠人工采摘,不仅效率低下而且劳动强度大。随着猕猴桃生产的发展趋向产业化与标准化,以人工采摘为主要方式的生产模式已经不能满足猕猴桃生产的要求。同时,部分学者根据棚架式栽培猕猴桃的多簇生长特点,基于仿生人工采摘的方式,确定机器人总体结构和功能,实现机械化采摘,但猕猴桃采摘机器人工作效率较低,并且还处于基础研究阶段,随着科技的发展,实现猕猴桃机器人的智能化、轻型化、集成一体化还需加大研究力度。
4.因此,为满足猕猴桃现现阶段采摘高效率、高品质的要求,实现机械化采摘是解决当前猕猴桃生产过程中的技术难题、提升猕猴桃采摘效率和果实品质、并降低劳动强度的重要研究方向。
技术实现要素:
5.本发明所要解决的技术问题是针对现有技术的上述缺陷,提供一种多簇猕猴桃间隙分送柔性弯折采摘装置及方法。
6.为了实现上述目的,本发明提供了一种多簇猕猴桃间隙分送柔性弯折采摘装置,其中,包括:
7.机架;
8.分送机构,安装在所述机架上,用于自动扶持和间隙分送猕猴桃果实,并为果梗分离提供支撑;
9.果梗分离机构,安装在所述机架上,位于所述分送机构下方并与所述分送机构保持平行,所述果梗分离机构与所述分送机构之间的距离与猕猴桃果实大小适配,用于分离猕猴桃果实和果梗,实现猕猴桃的柔性弯折采摘;
10.中间排果风选机构,安装在所述机架上,位于所述果梗分离机构下方,对分离后的猕猴桃果实进行风选,并减缓猕猴桃果实的下落速度和减少杂质;
11.传动机构,安装在所述机架上,分别与所述分送机构、果梗分离机构和所述中间排果风选机构连接;以及
12.控制装置,安装在所述机架上,分别与所述传动机构和分送机构连接,并实时调整传动机构的工作速度。
13.上述的多簇猕猴桃间隙分送柔性弯折采摘装置,其中,还包括激光传感器,安装在
所述机架上,并与所述控制装置连接,所述激光传感器用于检测猕猴桃果梗与果实的分离状态,若未分离时,则发送信号给所述控制装置,所述控制装置启动所述分送机构将所述猕猴桃果梗与果实分离。
14.上述的多簇猕猴桃间隙分送柔性弯折采摘装置,其中,所述分送机构为倾斜导板式分送机构,包括:
15.分禾器支架,安装在所述机架上;
16.导板式分禾器,包括多个分禾板,所述多个分禾板直线等距倾斜安装在所述分禾器支架上,以便于自动扶持和间隙分送猕猴桃果实,并为果梗分离提供支撑;以及
17.往复切割器,安装在所述分禾器支架上,包括动刀、定刀、摆杆和往复切割电机,所述动刀安装在所述定刀的间隙之间,并与所述摆杆连接,所述摆杆与所述往复切割电机连接,用于猕猴桃果实与果梗未完成分离时,切割实现猕猴桃果实与果梗的分离,避免造成损坏。
18.上述的多簇猕猴桃间隙分送柔性弯折采摘装置,其中,所述倾斜导板式分送机构还包括支撑杆,所述支撑杆的一端安装在所述导板式分禾器的中部,所述支撑杆的另一端安装在所述分禾器支架上,以进一步固定所述导板式分禾器,并有效阻隔猕猴桃树枝进入。
19.上述的多簇猕猴桃间隙分送柔性弯折采摘装置,其中,所述果梗分离机构包括:
20.采摘链条,张紧在采摘链轮上,所述采摘链轮通过采摘轴安装在所述机架上;以及
21.多个采摘器,以矩形均匀间隔阵列设置,每个所述采摘器均包括采摘条和锁紧盘,所述采摘条安装在所述锁紧盘上,所述采摘条之间的间距适配于猕猴桃果实的尺寸,所述锁紧盘安装在所述采摘链条上,所述采摘器用于在柔性张持的挤压作用下捡拾猕猴桃,并初步筛选杂质,猕猴桃的果实与果梗在所述采摘器转弯时呈现弯曲状,实现柔性弯折采摘。
22.上述的多簇猕猴桃间隙分送柔性弯折采摘装置,其中,所述中间排果风选机构包括:
23.壳体,安装在所述机架上,所述壳体上设置有顶端入口、底端出口、入风口和出风口,所述底端出口与收集箱连接;所述壳体的顶端入口处以直线等距阵列并排安装有u型齿,用于将所述果梗分离机构里的猕猴桃果实自动排出;以及
24.风机,安装在所述机架上,所述风机的出口与所述入风口连接,用于提供持续稳定的气流分选猕猴桃果实,并减缓猕猴桃果实的下落速度。
25.上述的多簇猕猴桃间隙分送柔性弯折采摘装置,其中,所述壳体包括上壳体、左下壳体和右下壳体,所述上壳体由钢板一体折弯形成一矩形容置空间,所述上壳体的顶端为所述顶端入口,所述上壳体的底端设置有左、右出口;所述左下壳体和右下壳体分别由钢板一体折弯形成一容置空间,所述左下壳体和右下壳体的顶端分别与所述上壳体的左、右出口连接,所述左下壳体和右下壳体的底端为底端出口,所述底端出口分别与所述收集箱连接;所述出风口设置于所述左下壳体和右下壳体的前端,所述入风口设置于所述左下壳体和右下壳体的后端。
26.为了更好地实现上述目的,本发明还提供了一种多簇猕猴桃间隙分送柔性弯折采摘方法,其中,包括如下步骤:
27.s100、通过控制装置调节传动机构到预设值并运动平稳;
28.s200、分送机构贴合猕猴桃棚架行进,猕猴桃果梗从分禾器之间的间隙进入并使
猕猴桃位于所述分禾器下方,完成自动扶持和间隙分送,并为猕猴桃果实与果梗分离提供支撑;
29.s300、果梗分离机构以逆时针方向运动,以分禾器为支撑,在挤压张持力的作用下,将猕猴桃果实捡拾到采摘器中,并进行初步筛选;
30.s400、待采摘器运动到转弯时,猕猴桃果实与果梗之间呈现弯曲状,实现猕猴桃柔性弯折采摘;
31.s500、采摘器运动到壳体的u型齿上,采摘条在所述u型齿的作用下,间隔变大排出猕猴桃果实,落入到中间排果风选机构中;以及
32.s600、风机产生的气流斜上吹入,将杂质从所述壳体的出风口排出,猕猴桃果实在气流作用下缓慢下落,顺着所述壳体的内壁面滚落到收集箱中。
33.上述的多簇猕猴桃间隙分送柔性弯折采摘方法,其中,所述风机产生的气流速度满足:v
e
<v
a
<v
g
,其中,v
e
为杂质的悬浮速度,v
a
为风机产生的气流速度,v
g
为猕猴桃果实的悬浮速度。
34.上述的多簇猕猴桃间隙分送柔性弯折采摘方法,其中,步骤s400中,还包括:
35.当激光传感器检测猕猴桃果实与果梗未分离时,则所述控制装置启动所述分送机构的往复切割器切割完成猕猴桃果实与果梗的分离。
36.本发明的技术效果在于:
37.本发明能够自动实现猕猴桃的间隙分送、果梗分离、自动排出、风力清选的过程,完成猕猴桃的机械化采摘,从根本上解决了猕猴桃采摘效率低、高损高杂等问题,并有效降低了劳动强度和作业成本,有效提升了猕猴桃采摘性能和自动化程度。
38.其中,导板式分禾器采用倾斜方式,可便于自动扶持和间隙分送猕猴桃果实,并为果梗分离提供支撑;支撑杆可有效阻隔猕猴桃树枝等进入,避免造成其损坏;采摘器在柔性张持的挤压作用下将猕猴桃捡拾进去,可初步筛选枝条、果叶等杂质,当采摘器转弯时,猕猴桃与果梗呈现弯曲状,实现猕猴桃柔性弯折采摘过程;u型齿可将果梗分离机构里的猕猴桃自动排出;风机可用来分选猕猴桃和果叶等杂质,并能够减缓猕猴桃下落速度,降低猕猴桃损伤,确保猕猴桃品质。
39.以下结合附图和具体实施例对本发明进行详细描述,但不作为对本发明的限定。
附图说明
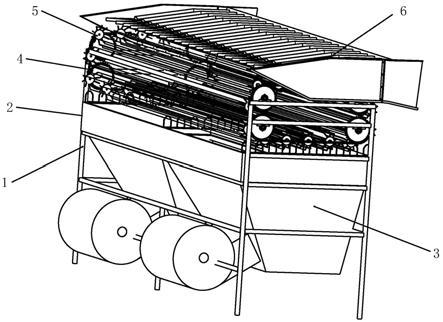
40.图1为本发明一实施例的装置结构示意图;
41.图2为本发明一实施例的分送机构结构示意图;
42.图3为本发明一实施例的导板式分禾器结构示意图;
43.图4为本发明一实施例的往复切割器结构示意图;
44.图5为本发明一实施例的果梗分离机构结构示意图;
45.图6为本发明一实施例的采摘器结构示意图;
46.图7为本发明一实施例的中间排果风选机构结构示意图;
47.图8为本发明一实施例的壳体结构示意图。
48.其中,附图标记
49.1 机架
50.2 控制装置
51.3 中间排果风选机构
52.31 风机
53.32 壳体
54.321 上壳体
55.322 左下壳体
56.323 右下壳体
57.324 顶端入口
58.325 底端出口
59.33 u型齿
60.4 传动机构
61.5 果梗分离机构
62.51 采摘链轮
63.52 采摘器
64.521 锁紧盘
65.522 采摘条
66.6 分送机构
67.61 分禾器支架
68.62 导板式分禾器
69.621 分禾板
70.63 支撑杆
71.64 往复切割器
72.641 定刀
73.642 动刀
74.643 摆杆
具体实施方式
75.下面结合附图对本发明的结构原理和工作原理作具体的描述:
76.参见图1,图1为本发明一实施例的装置结构示意图。本发明的多簇猕猴桃间隙分送柔性弯折采摘装置,包括:机架1;分送机构6,安装在所述机架1上,用于自动扶持和间隙分送猕猴桃果实,并为果梗分离提供支撑;果梗分离机构5,安装在所述机架1上,位于所述分送机构6下方并与所述分送机构6保持平行,所述果梗分离机构5与所述分送机构6之间的距离与猕猴桃果实大小适配,并有一定的挤压力,用于分离猕猴桃果实和果梗,实现猕猴桃的柔性弯折采摘;中间排果风选机构3,安装在所述机架1上,并位于果梗分离机构5下方,用于将分离后的猕猴桃果实排出时,对其进行风选,并利于减缓猕猴桃下落速度,降低猕猴桃损伤和减少杂质;传动机构4,安装在所述机架1上,并分别与所述分送机构6、果梗分离机构5和所述中间排果风选机构3连接;以及控制装置2,安装在所述机架1上,并分别与所述传动机构4和分送机构6连接,并实时调整传动机构4的工作速度。
77.本实施例中,还可包括激光传感器(图未示),安装在所述机架1上,并与所述控制
装置2连接,所述激光传感器用于检测猕猴桃果梗与果实的分离状态,若未分离时,则发送信号给所述控制装置2,所述控制装置2启动所述分送机构6将所述猕猴桃果梗与果实分离。
78.其中,所述传动机构4包括:分送传动机构,安装在所述机架1上,并与所述往复切割器64连接;果梗分离传动机构,安装在所述机架1上,并与所述果梗分离机构5的采摘链轮51连接;以及中间排果风选传动机构,安装在所述机架1上,并与所述风机31连接。
79.参见图2
‑
图4,图2为本发明一实施例的分送机构6结构示意图,图3为本发明一实施例的导板式分禾器62结构示意图,图4为本发明一实施例的往复切割器64结构示意图。本实施里的所述分送机构6为倾斜导板式分送机构6,包括:分禾器支架61,安装在所述机架1上;导板式分禾器62,包括多个分禾板621,所述多个分禾板621直线等距以一定角度倾斜安装(以猕猴桃棚架为基准)在所述分禾器支架61上,以便于自动扶持和间隙分送猕猴桃果实,并为果梗分离提供支撑;以及往复切割器64,安装在所述分禾器支架61上,包括动刀642、定刀641、摆杆643和往复切割电机,所述动刀642安装在所述定刀641的间隙之间,并与所述摆杆643连接,所述摆杆643与所述往复切割电机(图未示)连接,用于猕猴桃果实与果梗未完成分离时,切割实现猕猴桃果实与果梗的分离,避免造成果实损坏。
80.本实施例的所述倾斜导板式分送机构6还可包括支撑杆63,所述支撑杆63的一端与分禾板621的中部连接,所述支撑杆63的另一端安装在所述分禾器支架61上,以进一步固定所述导板式分禾器62,并有效阻隔猕猴桃树枝等进入,避免造成损坏。
81.参见图5及图6,图5为本发明一实施例的果梗分离机构5结构示意图,图6为本发明一实施例的采摘器52结构示意图。本实施例的所述果梗分离机构5包括:采摘链条,张紧在采摘链轮51上,所述采摘链轮51通过采摘轴安装在所述机架1上;以及多个采摘器52,以矩形均匀间隔阵列设置,每个所述采摘器52均包括采摘条522和锁紧盘521,所述采摘条522安装在所述锁紧盘521上,所述采摘条522之间的间距适配于猕猴桃果实的尺寸,即采摘条522之间的间距根据猕猴桃的尺寸来确定;所述锁紧盘521安装在所述采摘链条上,所述采摘器52用于在柔性张持的挤压作用下捡拾猕猴桃,并可初步筛选枝条、果叶等杂质,猕猴桃的果实与果梗在所述采摘器52转弯时呈现弯曲状,实现柔性弯折采摘。
82.参见图7及图8,图7为本发明一实施例的中间排果风选机构3结构示意图,图8为本发明一实施例的壳体32结构示意图。其中,所述中间排果风选机构3包括:壳体32,安装在所述机架1上,所述壳体32上设置有顶端入口324、底端出口325、入风口和出风口(图未示),所述底端出口325与收集箱连接;所述壳体32的顶端入口324处以直线等距阵列并排安装有u型齿33,用于将所述果梗分离机构5里的猕猴桃果实自动排出;以及风机31,安装在所述机架1上,所述风机31的出口与所述入风口连接,用于提供持续稳定的气流分选猕猴桃果实,可分选猕猴桃和果叶等杂质,并能减缓猕猴桃果实的下落速度,降低猕猴桃损伤,确保猕猴桃品质。
83.其中,所述壳体32包括上壳体321、左下壳体322和右下壳体323,壳体32表面材料优选为橡胶,可降低猕猴桃损伤;所述上壳体321由钢板一体折弯形成一矩形容置空间,所述上壳体321的顶端为所述顶端入口324,所述上壳体321的底端设置有左、右出口;所述左下壳体322和右下壳体323分别由钢板一体折弯形成一容置空间,所述左下壳体322和右下壳体323的顶端分别与所述上壳体321的左、右出口连接,以保证猕猴桃准确落入,所述左下壳体322和右下壳体323的底端为底端出口325,所述底端出口325分别与所述收集箱连接,
完成猕猴桃收集过程;所述出风口设置于所述左下壳体322和右下壳体323的前端,可开个长条孔排出果叶等杂质,所述入风口设置于所述左下壳体322和右下壳体323的后端,与风机31出口连接,为猕猴桃风选提供空间。
84.本发明的多簇猕猴桃间隙分送柔性弯折采摘方法,包括如下步骤:
85.步骤s100、通过控制装置2调节传动机构4到预设值并运动平稳;具体可包括调节往复切割电机、果梗分离电机、风机电机到预设值,通过控制装置2待各个传动机构4运动平稳,其中当激光传感器检测果梗与猕猴桃未分离时,才能启动往复切割电机;
86.步骤s200、倾斜导板式分送机构6贴合猕猴桃棚架行进,猕猴桃果梗从导板式分禾器62之间的间隙进入并使猕猴桃位于分禾板621下方,完成自动扶持和间隙分送,并为猕猴桃果实与果梗分离提供支撑;
87.步骤s300、果梗分离机构5以逆时针方向运动,以导板式分禾器62为支撑,在挤压张持力的作用下,将猕猴桃果实捡拾到采摘器52中,并进行初步筛选;
88.步骤s400、待采摘器52运动到转弯时,猕猴桃果实与果梗之间呈现弯曲状,实现猕猴桃柔性弯折采摘;若激光传感器检测果梗未完成分离,则启动往复切割电机,通过往复切割器64完成果梗分离工作;
89.步骤s500、采摘器52运动到壳体32的u型齿33上,采摘条522在所述u型齿33的作用下,间隔变大,致使猕猴桃果实从中排出,落入到中间排果风选机构3中;以及
90.步骤s600、风机31产生的气流斜上吹入,将果叶等杂质从所述壳体32的出风口排出,猕猴桃果实在气流作用下缓慢下落,顺着所述壳体32的内壁面滚落到收集箱中。
91.其中,所述风机31产生的气流速度满足:v
e
<v
a
<v
g
,其中,v
e
为杂质的悬浮速度,v
a
为风机31产生的气流速度,v
g
为猕猴桃果实的悬浮速度。
92.工作时,先通过控制装置2调节往复切割电机、果梗分离电机、风机31电机到预设值,待各个传动机构4运动平稳,其中当激光传感器检测果梗与猕猴桃未分离时,再启动往复切割电机;倾斜导板式分送机构6需要贴合棚架行进,在导板式分禾器62的作用下,猕猴桃从其间隙进入并位于其下方进行输送,完成自动扶持和间隙分送过程;在导板式分禾器62的支撑下,采摘链轮51以逆时针方向运动,通过挤压张持的作用下,将猕猴桃捡拾到采摘器52中,可进行初步筛选枝条、果叶等杂质,待采摘器52转弯时,猕猴桃与果梗呈现弯曲状,易于分离,从而实现猕猴桃柔性弯折采摘,若激光传感器检测果梗未完成分离,则启动往复切割电机,通过往复切割器64完成果梗分离工作;待采摘器52运动到u型齿33位置上,采摘条522在其作用下,间隔变大,致使猕猴桃从中排出,落入到上壳体321中,并将排出的猕猴桃分为左右两部分,落入左、右下壳体322、323中;同时风机31产生的气流斜上吹入,将果叶等杂质从出风口排出,而猕猴桃在气流的作用下,缓慢下落,顺着左、右下壳体322、323的壁面滚落到收集箱中,最终完成猕猴桃采摘工作。
93.本发明能自动实现猕猴桃的间隙分送、果梗分离、自动排出及风力清选,完成猕猴桃的机械化采摘,从根本上解决了猕猴桃采摘效率低、高损高杂等问题,并有效降低了劳动强度和作业成本,有效提升了猕猴桃采摘性能和自动化程度。
94.当然,本发明还可有其它多种实施例,在不背离本发明精神及其实质的情况下,熟悉本领域的技术人员当可根据本发明作出各种相应的改变和变形,但这些相应的改变和变形都应属于本发明所附的权利要求的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。