1.本发明涉及磁悬浮鼓风机控制技术领域,尤其涉及名称一种磁悬浮鼓风机风量曲线拟合与风量转速平稳切换控制方法。
背景技术:
2.磁悬浮鼓风机是一种融入磁悬浮轴承技术和高速永磁电机技术的新型鼓风机。空气通过磁悬浮高速永磁电机直接驱动的三元流离心叶轮,沿着叶轮流道向外流出。叶轮流道为扩压式流道,空气流经叶轮后压力升高。具有一定压力的空气流出风机叶轮后,经扩压器进一步增压,最后流入蜗壳,并在蜗壳中增压,最终通过排气管道向外输送到管网中。
3.在现有技术实现过程中,存在如下问题:磁悬浮鼓风机恒风量控制功能受性能曲线影响,其控制曲线构造繁琐。在运行过程中,系统转速变化灵敏度过高而时常调速,产生不必要的能耗,缩短了磁浮电机的使用寿命。同时,磁悬浮鼓风机运行时风量与转速控制切换瞬间系统转速波动量较大,甚至在正常运行时无法实现风量转速任意切换功能,进而用户需多次停机完成模式切换。
技术实现要素:
4.本发明提供一种磁悬浮鼓风机风量曲线拟合与风量转速平稳切换控制方法,以克服系统转速变化灵敏度过高而时常调速,产生不必要的能耗等技术问题。
5.为了实现上述目的,本发明的技术方案是:
6.一种磁悬浮鼓风机风量曲线拟合与风量转速平稳切换控制方法,其特征在于,包括:
7.步骤1、磁悬浮鼓风机系统自动打开放空阀,输入目标风量值/目标转速值,使鼓风机进入风量模式/转速模式运行;
8.步骤2、按启动转速/目标转速值升速运行至系统平稳后,使鼓风机系统以运行转速运行,当鼓风机当前运行转速超过设定关阀转速时,放空阀关闭,其中系统平稳为风量值与风压值波动在设定区域内;
9.步骤3、待鼓风机实际风量和实际风压波动平稳,手动切换鼓风机运行模式,此时鼓风机以当前转速进入转速模式/风量模式运行,其中波动平稳为风量值与风压值波动在设定区域内;
10.步骤4、停止鼓风机运行,磁悬浮鼓风机系统自动打开放空阀。
11.进一步的,步骤2中当鼓风机以风量模式运行时,所述运行转速的获取方法为:将鼓风机当前实际风量值与实际出气压力折算为标况下折合风量与折合压力,实际转速折算为折合转速,应用曲线拟合工具得到折合风量控制曲线,将折合风量与折合风压值作为输入,进而获得鼓风机电机所需启动转速。
12.进一步的,所述折合风量控制曲线公式为:
13.n=p
00
p
10
·
f p
01
·
pt p
20
·
f2 p
11
·
f
·
pt p
02
·
pt2 p
30
·
f3 p
21
·
f2·
pt p
12
·
f
·
pt2 p
03
·
pt314.其中,p
00
为曲线常数项,p
10
、p
20
、p
30
为折合风量f不同幂次系数项,p
01
、p
02
、p
03
为折合压力pt不同幂次系数项,p
11
、p
21
、p
12
为折合风量f与折合压力pt混合幂次系数项,n为电机折合转速标幺值,将标幺值进行换算得到启动转速。
15.进一步的,当折合风量在风量目标值允许波动区域外时,将折合风量与折合风压代入折合风量控制曲线,使折合风量将收敛在风量目标值允许波动区域内,输出转速标幺值,并换算为电机所需运行转速。
16.进一步的,当鼓风机的出气压力或风量目标值改变后,应用折合风量控制曲线计算出鼓风机当前所需转速。
17.有益效果:本发明简化了折合风量控制曲线,并在恒风量控制中实现平稳升速与降速运行。对于运行过程中转速变化灵敏度过高问题,本发明加入风量设定值允许波动区域,在此区域内系统保持上一时刻转速运行,降低了转速高频波动产生的电耗,增长了磁浮电机的使用寿命。对于运行时风量转速切换控制问题,本发明实现在运行过程中恒风量与恒转速平稳切换的功能,减少了用户不必要的停机次数。
附图说明
18.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
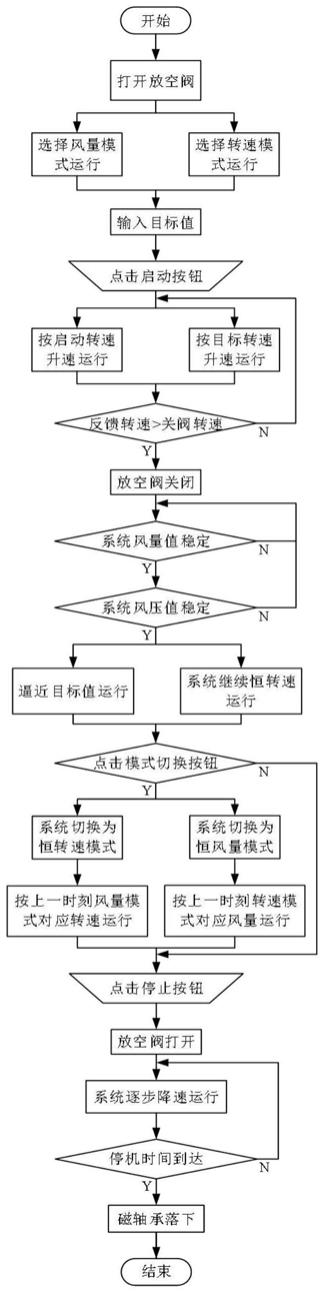
19.图1为本发明控制方法流程图;
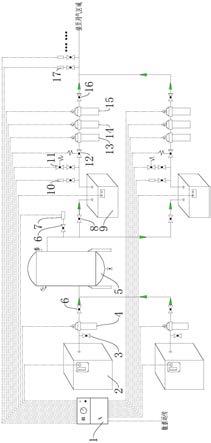
20.图2为磁悬浮鼓风机控制系统结构图;
21.图3为磁悬浮鼓风机系统性能曲面仿真图;
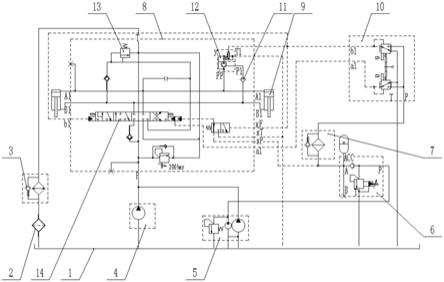
22.图4为磁悬浮鼓风机系统风量控制原理图。
具体实施方式
23.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
24.本实施例提供了一种磁悬浮鼓风机风量曲线拟合与风量转速平稳切换控制方法,如图1,其特征在于,包括:
25.步骤1、磁悬浮鼓风机系统自动打开放空阀,输入目标风量值/目标转速值,使鼓风机进入风量模式/转速模式运行;
26.步骤2、按启动转速/目标转速值升速运行至系统平稳后,使鼓风机系统以运行转速运行,当鼓风机当前运行转速超过设定关阀转速时,放空阀关闭,其中系统平稳为风量值与风压值波动在设定区域内;
27.步骤3、待鼓风机实际风量和实际风压波动平稳,手动切换鼓风机运行模式,此时
鼓风机以当前转速进入转速模式/风量模式运行,其中波动平稳为风量值与风压值波动在设定区域内;
28.步骤4、停止鼓风机运行,磁悬浮鼓风机系统自动打开放空阀,当到达停机时间时,磁轴承落下,关闭磁悬浮鼓风机系统。
29.通过应用以上风量控制与风量转速切换方法,磁悬浮鼓风机系统可安全平稳的运行到目标值,且在运行过程中可实现恒转速与恒风量模式平稳切换,避免切换瞬间转速不平稳。
30.在具体实施例中,步骤2中当鼓风机以风量模式运行时,所述启动转速为系统内部设置常量(根据现场调试情况而定),系统稳定后其运行转速的获取方法为:将鼓风机当前实际风量值与实际出气压力折算为标况下折合风量与折合压力,实际转速折算为折合转速,应用matlab软件曲线拟合工具得到折合风量控制曲线,将折合风量与折合风压值作为输入,进而获得鼓风机电机所需运行转速。
31.经过多次仿真测试,折合风量控制曲线可简化拟合为三阶多项式如下:
32.n=p
00
p
10
·
f p
01
·
pt p
20
·
f2 p
11
·
f
·
pt p
02
·
pt2 p
30
·
f3 p
21
·
f2·
pt p
12
·
f
·
pt2 p
03
·
pt333.其中,p
00
为曲线常数项,p
10
、p
20
、p
30
为折合风量f不同幂次系数项,p
01
、p
02
、p
03
为折合压力pt不同幂次系数项,p
11
、p
21
、p
12
为折合风量f与折合压力pt混合幂次系数项,n为电机折合转速标幺值,将其标幺值进行换算即可得到折合转速值。
34.在具体实施例中,当折合风量在风量目标值允许波动区域外时,将折合风量与折合风压代入折合风量控制曲线,使折合风量将收敛在风量目标值允许波动区域内,输出转速标幺值,并换算为电机所需运行转速。
35.在具体实施例中,当鼓风机的出气压力或风量目标值改变后,应用折合风量控制曲线计算出鼓风机当前所需转速。
36.图2为磁悬浮鼓风机控制系统结构,其中包括触摸屏、plc及其扩展模块、放空阀、磁浮控制器、变频器、磁浮电机及其内部传感器、柜内温度与压力传感器、远程通讯模块与上位机,以上元器件之间通讯方式。其中触摸屏中含有启动和关闭按钮。
37.图3为磁悬浮鼓风机利用折合风量控制曲线构建的风量控制三维拟合曲面。其中,flow为折合风量值、pt为折合风压值、n_per为转速标幺值。建立风量控制曲线的折合风量控制曲线,经过多组试验数据拟合测试并分析,消去折合风量控制曲线中对曲面存在劣势影响的参数项;将消去劣势影响参数项的试验数据放入matlab拟合工具中,拟合处理得到风量控制曲面各项式参数,其拟合误差均方根低于0.005。
38.图4为磁悬浮鼓风机系统风量控制原理。其中,p0为鼓风机风量风压初始位置,p
n
为鼓风机风量风压目标位置,图4中鼓风机将从p0位置运行到目标位置p
n
;
39.控制系统输入设定风量值即为p
n
的横坐标,根据此时目标风量值与实测风压值(p1位置坐标)代入风量控制曲面,自动计算出所需转速标幺值,将转速标幺值转化为所需转速值对应的运行频率并传输给变频器。在图4中,磁悬浮鼓风机控制系统将做升速运动。待系统风量值与风压值在设定范围内波动,此时系统实际状态处于p2位置。而控制系统目标风量值不变,因此系统自动将p3位置坐标数据代入风量控制曲面,再次重复上一步骤完成升速运行;待系统运行平稳,p4位置即为系统实际状态,p5位置即为此时目标状态。经过多次平
稳升速,磁悬浮鼓风机系统最终运行到目标风量所处位置并保持稳定运行。若更改目标风量值,控制系统将再次执行上述步骤平稳逼近目标值。
40.在具体应用中,风量运行模式启动转速为系统单独设定,风量控制曲面适用于非启动状态的正常工况。
41.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。