1.本发明涉及医疗器械技术领域,特别是一种实现介入支架快慢速释放的手柄及输送器。
背景技术:
2.主动脉夹层是一种病情凶险、进展快、死亡率高的急性主动脉疾病,其发病率约占普通人群的5%~20%。对于局限在降主动脉的病变,临床以覆膜支架介入手术为主要治疗方案,即,将覆膜支架压握在输送器内,通过股动脉穿刺口/切口入路,沿导丝送入到病变部位,后撤输送器外鞘管,覆膜支架自膨打开,贴附血管壁,隔绝主动脉夹层或瘤腔内血流,达到治疗目的。
3.主动脉覆膜支架系统是针对主动脉腔内隔绝术设计的一种医疗器械,由覆膜支架和输送器两部分组成。输送器决定覆膜支架的释放方式和定位准确性,其结构设计对术者的操作手感和覆膜支架的精准释放有重要影响。
4.输送器的手柄连接外鞘管并带动外鞘管后撤,以释放覆膜支架。用于主动脉夹层介入手术的覆膜支架,其近心端首两节的压握体积较大,会增加外鞘管的后撤阻力,影响术者对首两节覆膜支架的定位控制和精确释放;当完成覆膜支架近心端的定位和释放后,一般需要快速释放覆膜支架剩余节段,以建立血流通道,避免在血流冲击下覆膜支架移位。另一方面,介入手术需要在射线下确定器械状态和覆膜支架位置,特别是在覆膜支架的释放过程中,术者需要随时观察影像屏幕,因此,输送器的设计不仅应满足相应的慢速、快速释放的要求,同时其切换操作应简洁方便,保证术者可以将注意力集中在影像观察上。
5.待覆膜支架释放完成并撤出输送器前,需要将tip头和芯管回收到外鞘管内并锁定tip头与外鞘管的相对位置,避免回撤过程中将tip头和芯管以及外鞘管发生分离,造成撤出股动脉穿刺口/切口时直径突变发生漏血情况。
6.目前,具有快、慢释放功能的输送器手柄,由于切换方式具有方向性,需要术者目视确认手柄位置,有时需要旋转手柄至切换钮处于理想操作位置,严重干扰术者对影像屏幕的观察。且手柄不具有锁紧功能,不能保证运输过程中的稳定性和回撤时外鞘管、tip头和芯管的位置相对固定。
技术实现要素:
7.本发明提供一种用于实现介入支架快慢速释放的输送器手柄及输送器,通过在手柄壳体一端的螺杆套之轴向延伸部设置凸轮环快慢切换机构,实现介入支架的慢速、快速释放,且切换方式不区分手柄圆周方向,方便操作,有利于临床术者将更多注意力集中到支架释放的观察屏上。
8.本发明技术方案如下:
9.一种实现介入支架快慢速释放的手柄,包括手柄壳体和手柄壳体内的螺杆套,所述手柄壳体的一端具有所述螺杆套的轴向延伸部,所述轴向延伸部上设置有凸轮环快慢切
换机构;所述凸轮环快慢切换机构包括凸轮环和伸缩牙板;沿所述凸轮环的径向,所述伸缩牙板向内延伸有牙体;所述伸缩牙板的外表面与所述凸轮环的凹凸内表面相抵触连接;所述牙体位于所述螺杆套的径向通孔内,并能够从所述径向通孔内伸出,与所述螺杆套内设置的螺杆上的螺纹啮合连接,以实现所述螺杆套沿所述螺杆的滑行式快速移动和旋转式慢速移动。
10.作为优选,所述凸轮环的内孔沿周向中心对称分布有一对浅弧形槽和一对深弧形槽,形成所述凹凸内表面。
11.作为优选,所述牙体为与所述螺杆的梯形螺纹相配合的内梯形螺纹;所述浅弧形槽和深弧形槽的径向槽深之差不小于所述牙体高度。
12.作为优选,所述螺杆套依次包括第一轴段、第二轴段、定位台肩和第三轴段;所述第一轴段、第二轴段和定位台肩的外径依次升高;所述凸轮环与所述第二轴段间隙配合,且通过所述定位台肩和固定于所述第一轴段的卡环实现轴向定位;所述手柄壳体固定于所述第三轴段。
13.作为优选,实现介入支架快慢速释放的手柄还包括弧形卡套,所述弧形卡套包括内径依次增大的鞘管套定位孔段、螺杆定位孔段和按钮孔段,所述按钮孔段上对称设有两个按钮;所述按钮的一端与所述螺杆定位孔段的筒壁相连,另一端沿轴向延伸到所述按钮孔段的边缘,并继续延伸设有卡钩,所述卡钩卡接于所述卡环的g型槽内。
14.作为优选,所述凸轮环的导向孔所在侧沿轴向延伸有限位块,对应的所述螺杆套定位台肩的端面上设有弧形限位槽;所述限位块随所述凸轮环的转动而在所述弧形限位槽内滑动,且所述限位块在所述弧形限位槽内滑动的两个极限位置分别对应所述伸缩牙板的外表面定位在所述浅弧形槽的槽底和定位在所述深弧形槽的槽底定位。
15.伸缩牙板包括牙板和簧片,所述牙板的中心位置设有簧片孔;所述簧片为穿设于所述簧片孔内的弓形弹簧片,所述簧片的支脚朝内,所述簧片的弧形弓顶与所述簧片孔的顶部相抵;对应的所述螺杆套上,与所述径向通孔呈十字交叉设有簧片槽;所述簧片槽优选为盲槽,所述簧片的支脚通过所述牙板和所述凸轮环压设于所述簧片槽内。
16.作为优选,所述牙板和所述凸轮环的材质包括由自润滑性较好的peek材质和/或pom材质,所述簧片的材质包括弹性较好的0cr17ni7al不锈钢或tini记忆合金。
17.作为优选,所述凸轮环的外表面正对所述浅弧形槽位置,设有指示位标;对应的所述手柄壳体上设有快速滑行移动标志和慢速旋转移动标志。
18.作为优选,所述浅弧形槽和深弧形槽之间的夹角为50
°
,对应的所述弧形限位槽的两个极限位置的夹角为50
°
;所述快速滑行移动标志和慢速旋转移动标志之间的夹角为50
°
。
19.作为优选,实现介入支架快慢速释放的手柄还包括鞘管接头,所述鞘管接头的鞘管连接段通过鞘管锁母固定鞘管;所述鞘管接头的外周面上设有导向板;所述导向板为近t型导向板,所述导向板的竖直段穿过所述螺杆上的鞘管接头导向槽,并在所述鞘管接头导向槽内移动进而带动所述鞘管沿轴向移动;所述导向板的水平段卡接在所述螺杆套和所述第二手柄之间;所述鞘管接头沿轴向设有用于容纳中管的中管通孔;所述中管通孔的末端通过密封圈和密封螺套将所述中管密封固定在所述鞘管接头。
20.一种实现介入支架快慢速释放的输送器,包括导向头、鞘管、螺杆和上述手柄;从
近端到远端,所述螺杆包括第一定位轴、按钮台肩和梯形螺纹轴,所述弧形卡套固定于所述第一定位轴并与所述按钮台肩的远端相齐平;所述螺杆套滑动套接在所述梯形螺纹轴;所述按钮台肩上对应所述按钮的位置设有按钮槽,使得所述按钮的自由端可向内倾斜而滑出或卡入所述卡环;所述螺杆内设有用于容纳鞘管的轴向通孔,鞘管接头导向槽开设在所述梯形螺纹轴。
21.本发明相对于现有技术优势在于:
22.1、本发明所述实现介入支架快慢速释放的手柄及输送器,通过设置螺杆套和在螺杆套的轴向延伸部设置的凸轮环快慢切换机构,凸轮环快慢切换机构包括凸轮环和伸缩牙板,实现支架的慢速、快速释放,且切换方式不区分手柄圆周方向,方便操作,有利于临床术者将更多注意力集中到支架释放的观察屏上。
23.2、凸轮环上的三角形位标指向手柄壳体的s,凸轮环上的限位块位于弧形限位槽左端,两块牙板顶弧位于浅弧形槽内,并被浅弧形槽下压,使得牙体与螺杆上的梯形螺纹咬合,转动手柄壳体,牙板在螺杆的梯形螺纹内做螺旋运动,进而带动螺杆套、鞘管接头、鞘管沿螺杆轴向缓慢移动,实现介入支架的缓慢释放。释放到位后,通过简单拨动凸轮环,使凸轮环转动一定角度,其三角形位标指向f时,限位块位于弧形限位槽右端,两牙板旋转至深弧形槽位置,两受压的簧片将两牙板顶起至与深弧形槽的弧顶相切;牙板与螺杆脱离咬合,沿螺杆快速后撤手柄壳体,带动螺杆套、鞘管接头及鞘管沿螺杆轴向快速移动,从而实现介入支架的快速释放。且不管处于哪种释放状态,簧片始终会将牙板顶向深弧形槽位置或浅弧形槽位置,故牙板不会自动压缩簧片从一个弧段进入另一弧段,除人为拨动凸轮环,手柄不会在快慢速释放状态间自动切换,使得手柄整体使用安全可靠。
24.3、本发明所述实现介入支架快慢速释放的手柄及输送器,将介入支架送到指定位置后,通过按压弧形卡套上的两个按钮,使得卡钩与卡环脱开解锁,进而使鞘管和导向头可以分离;介入支架释放完毕后,后撤弧形卡套,使得卡钩卡环重新钩挂锁住,此时后撤输送系统,不管手握手柄哪个部位,不论直拉后撤或旋转着后撤,都不会导致导向头及后释放机构脱出鞘管,进而避免后释放机构划伤血管内膜,避免鞘管、后释放机构、导向头依次从股动脉切口处撤出时尺寸突变、操作困难。
附图说明
25.图1是本发明所述实现介入支架快慢速释放的手柄外形结构示意图;
26.图2是本发明所述实现介入支架快慢速释放的手柄在旋转式慢速移动状态的剖视结构示意图;
27.图3是本发明所述实现介入支架快慢速释放的手柄在滑行式快速移动状态的剖视结构示意图;
28.图4是本发明所述实现介入支架快慢速释放的手柄凸轮环一种实施方式的端面结构示意图;
29.图5是本发明所述实现介入支架快慢速释放的手柄凸轮环另一种实施方式的端面结构示意图;
30.图6是本发明所述实现介入支架快慢速释放的手柄凸轮环的三维结构示意图;
31.图7是本发明所述实现介入支架快慢速释放的手柄凸轮环的剖视结构示意图;
32.图8是本发明所述实现介入支架快慢速释放的手柄螺杆套的三维结构示意图;
33.图9是本发明所述实现介入支架快慢速释放的手柄牙板的三维结构示意图;
34.图10是本发明所述实现介入支架快慢速释放的手柄簧片的三维结构示意图;
35.图11是本发明所述实现介入支架快慢速释放的手柄伸缩牙板的三维结构示意图;
36.图12是本发明所述实现介入支架快慢速释放的手柄弧形卡套的三维结构示意图;
37.图13是本发明所述实现介入支架快慢速释放的手柄弧形卡套的剖视结构及局部放大结构示意图;
38.图14是本发明所述实现介入支架快慢速释放的手柄弧形卡环的三维结构示意图;
39.图15是本发明所述实现介入支架快慢速释放的手柄弧形卡环的剖视结构示意图;
40.图16是本发明所述实现介入支架快慢速释放的手柄弧形卡套与卡环的3种配合结构剖视示意图;
41.图17(a)是本发明所述实现介入支架快慢速释放的手柄鞘管接头的端面结构示意图;
42.图17(b)是本发明所述实现介入支架快慢速释放的手柄鞘管接头的主视结构示意图;
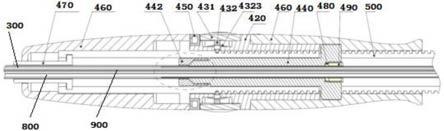
43.图18是本发明所述实现介入支架快慢速释放的输送器结构示意图。
44.图中各标号为:
45.100
‑
导向头,300
‑
鞘管,400
‑
手柄,410
‑
手柄壳体,420
‑
螺杆套,421
‑
第一轴段,422
‑
第二轴段,423
‑
定位台肩,424
‑
第三轴段,4221
‑
径向通孔,4222
‑
簧片槽,4231
‑
弧形限位槽,430
‑
凸轮环快慢切换机构,431
‑
凸轮环,431a
‑
导向段,431b
‑
凸轮段,4311
‑
浅弧形槽,4312
‑
深弧形槽,4313
‑
三角形位标,432
‑
伸缩牙板,4322
‑
牙板,43221
‑
簧片孔,4323
‑
簧片,4321
‑
牙体,433
‑
限位块,440
‑
鞘管移动装置,441
‑
鞘管接头,4411
‑
鞘管连接段,4412
‑
过渡段,4413
‑
导向板,4414
‑
密封孔,442
‑
鞘管锁母,450
‑
卡环,451
‑
g型槽,452
‑
定位孔,460
‑
弧形卡套,461
‑
鞘管套定位孔段,462
‑
螺杆定位孔段,463
‑
按钮孔段,464
‑
按钮,465
‑
卡钩,470
‑
鞘管套,480
‑
密封圈,490
‑
密封螺套,500
‑
螺杆,510
‑
第一定位轴511,
‑
鞘管套定位孔,520
‑
按钮台肩,521
‑
按钮槽,530
‑
梯形螺纹轴,531
‑
鞘管接头导向槽,800
‑
芯管,900
‑
中管。
具体实施方式
46.为了便于理解本发明,下面结合具体实施例和对比例,对本发明进行更详细的说明。
47.本发明所述近端是指接近导向头的一端,远端是指远离导向头的一端,内是指接近手柄轴线的一侧,外是指远离手柄轴线的一侧。
48.实施例1
49.一种实现介入支架快慢速释放的手柄,包括手柄壳体410和固定于手柄壳体410内的螺杆套420,手柄壳体410的一端(图1
‑
3中的近端)具有螺杆套420的轴向延伸部,轴向延伸部上设置有凸轮环快慢切换机构430。
50.凸轮环快慢切换机构430包括凸轮环431和伸缩牙板432。凸轮环431套接到与螺杆套420上且二者之间为间隙配合。沿凸轮环431的径向,伸缩牙板432向内延伸有牙体4321。所述牙体4321优选为与所述螺杆的梯形螺纹相配合的内梯形螺纹。
51.伸缩牙板432的外表面与凸轮环431的凹凸内表面相抵触连接;牙体4321位于螺杆套420的径向通孔4221内,并能够从径向通孔4221内伸出,与螺杆套420内设置的螺杆500上的螺纹啮合连接,以实现螺杆套420沿螺杆500的滑行式快速移动和旋转式慢速移动。
52.输送器的螺杆500内设有鞘管300,螺杆500上设有鞘管接头导向槽531,与鞘管300的远端固接的鞘管移动装置440的导向板4413穿过鞘管接头导向槽531,将鞘管300连接到手柄壳体410和螺杆套420。导向板4413与鞘管接头导向槽531为间隙配合。
53.凸轮环快慢切换机构430与输送器的螺杆500相配合,使得凸轮环431的凹凸内表面将牙体4321下压到从径向通孔4221内伸出,并与螺杆500上的螺纹啮合连接。通过转动手柄壳体410,螺杆套420转动,带动与之连接的鞘管移动装置440沿螺杆500向远端进行慢速移动,进而带动鞘管300一起沿螺杆500向远端进行慢速移动,实现介入支架的缓慢释放。
54.介入支架的缓慢释放过程完成后,小幅度(如50
°
)转动凸轮环431,使得凸轮环431的凹凸内表面将牙体4321回弹到径向通孔4221内,并与螺杆500上的螺纹相离,进而直接向远端快速拉动手柄壳体410,螺杆套420、鞘管移动装置440和鞘管300,一起沿螺杆500的鞘管接头导向槽531向远端进行滑行式快速移动。
55.由于凸轮环431的凹凸内表面本身对所述伸缩牙板432的外表面具有限位作用,设计时,如图4所示,可以将凸轮环431的凹凸内表面的两个限位处之间设计为平滑式过渡面,该平滑式过渡面使得术者施加一定扭矩才能转动凸轮环431。将凸轮环431的凹凸内表面的两个限位处的两侧设计为垂直式槽体面,使得术者无论施加多大扭矩都不能将凸轮环431旋转出该范围。故而术者操作时,不必目视确认手柄位置,直接通过尝试转动即可实现快慢速切换,不会干扰术者对影像屏幕的观察。
56.优选地,凸轮环快慢切换机构430包括两对伸缩牙板432,对称分布在螺杆的两侧。对应的螺杆套420的径向通孔4221也对称设计为两个,以使得旋转式慢速移动更加顺畅平稳。
57.实施例2
58.与上述实施例不同地是,如图5
‑
7所示,所述凸轮环431的内孔沿周向中心对称分布有一对浅弧形槽4311和一对深弧形槽4312,形成所述凹凸内表面。浅弧形槽4311的径向槽深为r1,深弧形槽4312的径向槽深为r2,所述浅弧形槽4311和深弧形槽4312的径向槽深之差不小于所述牙体4321高度,也即为,r2
‑
r1≥牙体4321的高度。优选r2
‑
r1=牙体4321的高度。
59.优选地,浅弧形槽4311和深弧形槽4312沿轴向延伸,且其夹角为50
°
,也即为凸轮环431能够转动的角度为50
°
。
60.优选地,凸轮环431为一圆柱形环,其外圆柱面上均匀分布有多个凸起,方便拇指拨动凸轮环431旋转;且外圆柱面上对应浅弧形槽4311的位置设有一三角形位标4313,用于指示凸轮环431旋转后所处位置,对应的所述手柄壳体410上设有快速滑行移动标志f和慢速旋转移动标志s。所述快速滑行移动标志f和慢速旋转移动标志s之间的夹角也为50
°
。
61.凸轮环431的内圆柱面分为导向段431a与凸轮段431b,导向段为一完整的内圆柱面,与螺杆套420上的凸轮柱为间隙配合;浅弧形槽4311和深弧形槽4312中心对称分布在凸轮段,浅弧形槽4311和深弧形槽4312之间的平滑式过渡面直接即为与导向段直径相同的圆柱面。
62.优选地,凸轮环431的导向孔所在侧沿轴向延伸有限位块433,用于进一步限制凸轮环431旋转的位置范围;对应的螺杆套420的定位台肩423的端面上设有弧形限位槽4231;限位块433随所述凸轮环431的转动而在弧形限位槽4231内滑动,且限位块433在弧形限位槽4231内滑动的两个极限位置(4321a,4321b)分别对应伸缩牙板432的外表面定位在所述浅弧形槽4311的槽底和定位在所述深弧形槽4312的槽底。也即为,弧形限位槽4231的两个极限位置之间的夹角为50
°
。
63.作为优选,如图8所示,螺杆套420依次包括第一轴段421、第二轴段422、定位台肩423和第三轴段424;第一轴段421、第二轴段422和定位台肩423的外径依次升高;凸轮环431与第二轴段422间隙配合,且凸轮环431设于所述定位台肩423和卡环450之间并通过二者实现轴向定位;卡环450固定于第一轴段421,手柄壳体410固定于第三轴段424。
64.作为优选,伸缩牙板432包括牙板4322和簧片4323,如图9所示,牙板4322的中心位置设有簧片孔43221;簧片4323为穿设于簧片孔43221内的弓形弹簧片,如图10
‑
11所示,簧片4323的支脚4323a朝内,簧片4323的弧形弓顶与簧片孔43221的顶部相抵;对应的螺杆套420上,与径向通孔4221呈十字交叉设有簧片槽4222;簧片槽4222优选为盲槽,簧片4323的支脚43231通过牙板4322和凸轮环431压设于簧片槽4222内。所述伸缩牙板432的外表面即为所述牙板4322的弧形顶面4322a,该弧形顶面的弧度小于深弧形槽4312的弧度。
65.作为优选,所述牙板4322和所述凸轮环431的材质包括由自润滑性较好的peek材质和/或pom材质,所述簧片4323的材质包括弹性较好的0cr17ni7al不锈钢或tini记忆合金。手柄其余各部件的材质包括abs、pe、pvc等塑料材质。
66.作为优选,如图12
‑
13所示,实现介入支架快慢速释放的手柄还包括弧形卡套460,弧形卡套460为近端小远端大的弧形套筒。所述弧形卡套460包括内径依次增大的鞘管套定位孔段461、螺杆定位孔段462和按钮孔段463,所述按钮孔段463上对称设有两个按钮464;所述按钮464的一端与所述螺杆定位孔段462的筒壁相连,另一端沿轴向延伸到所述按钮孔段463的边缘,并继续延伸设有卡钩465,所述卡钩465卡接于所述卡环450的g型槽451内。卡钩465的高度为h1,卡钩长度为w1。
67.作为优选,如图14
‑
15所示,卡环450的内孔为定位孔452,与所述螺杆套420的第一轴段421为过盈配合。所述g型槽的开口高度为h2,卡槽内部宽度为w2。其中,h2>h1,w2>w1。卡钩465与卡环450的相对卡钩情况如图16所示,图16(a)为按钮464未受力时卡钩465与卡环450钩挂锁住状态示意图。图16(b)为按钮464受压时卡钩465与卡环450解锁状态示意图。图16(c)为按钮464不受力时卡钩465与卡环450脱开状态示意图。
68.该弧形卡套460的按钮464和卡钩465,使得弧形卡套460与手柄壳体410通过卡环450相挂钩锁住,实现手柄的锁紧功能,不论凸轮环431旋转至快速释放状态还是慢速释放状态,不论旋转还是后拉手柄壳体410,弧形卡套460与卡环450都不会脱开,保证运输过程中的振动及使用过程中对手柄的误碰都不会导致支架覆膜段提前释放,保证产品使用的安全性。
69.优选地,手柄壳体410的近端外径、定位台肩423的外径、凸轮环431的远端外径、凸轮环431的近端外径、卡环450的外径和弧形卡套460的远端外径均相等,使得手柄外形整体圆润美观,握持方便。
70.作为优选,鞘管移动装置440包括鞘管接头441,鞘管接头441如图17(b)所示,分为
鞘管连接段4411和过渡段4412;鞘管300的远端通过鞘管锁母442固接于鞘管连接段4411;过渡段4412远端的外周面上设有导向板4413,过渡段4412远端的内孔处设有密封孔4414;所述导向板4413如图17(a)所示,为近t型导向板,导向板4413的竖直段穿过螺杆500的鞘管接头导向槽531,并在所述鞘管接头导向槽531内移动进而带动所述鞘管300沿轴向移动;所述导向板4413的水平段卡接在所述螺杆套420和所述手柄外壳之间;所述过渡段4412沿轴向设有用于容纳中管900的中管通孔;所述中管通孔的末端通过密封圈480和密封螺套490将所述中管900密封固定在所述鞘管接头441。
71.具体使用时,手柄处于初始状态:弧形卡套460与卡环450卡扣在一起,凸轮环431上的三角形位标4313指向手柄壳体410的s,此时凸轮环431上的限位块433位于螺杆套420的弧形限位槽4231左端,两块牙板4322顶弧位于凸轮环431的浅弧形槽4311内,牙板4322被浅弧形槽4311下压并沿螺杆套420上的径向通孔4221下移,支撑于簧片槽4222内的簧片4323被牙板4322下压变平,牙体4321与螺杆500上的梯形螺纹咬合。
72.将介入支架送到指定位置后,按压下弧形卡套460上的两个按钮464,则两个卡钩465与卡环450脱开解锁,此时旋转手柄壳体410,则牙板4322会在螺杆500的梯形螺纹内做螺旋运动,牙板4322会带动螺杆套420、手柄壳体410、鞘管接头441、鞘管300沿螺杆500轴向缓慢移动,从而实现介入支架的缓慢释放。
73.当介入支架缓慢释放到位时,需要切换成快速释放,顺时针(从近端向远端看)拨动凸轮环431,使凸轮环431转动50度,凸轮环431的三角形位标4313指向f。此时凸轮环431的限位块433位于螺杆套420弧形限位槽4231的右端,两牙板4322旋转至凸轮环431深弧形槽4312位置,两受压的簧片4323将两牙板4322顶起至牙板4322顶弧与深弧形槽4312的弧顶相切;此时牙板4322与螺杆500脱离咬合,沿螺杆500快速后撤手柄壳体410,则可带动螺杆套420、鞘管接头441及鞘管300沿螺杆500轴向快速移动,从而实现介入支架的快速释放。
74.本发明所述实现介入支架快慢速释放的手柄,操作时无需目视,用拇指触摸到凸轮环431外周的凸起后拨动凸轮环431,即可实现快慢速释放状态的迅速切换。且不管处于哪种释放状态,簧片4323始终会将牙板4322顶向凸轮环431深弧形槽4312位置或浅弧形槽4311位置,故牙板4322不会自动压缩簧片4323从一个弧段进入另一弧段,除人为拨动凸轮环431,手柄不会在快慢速释放状态间自动切换,使得手柄整体使用安全可靠。
75.介入支架释放完毕后,确保凸轮环431处于快速释放位置,后撤弧形卡套460,当卡钩斜面与卡环接触时,卡钩会被卡环挤压下弯,直至卡钩465滑进卡环450的g型槽451内,与卡环450重新钩挂锁住。此时后撤输送系统时,不管手握手柄哪个部位,不论直拉后撤或旋转着后撤,都不会导致导向头及后释放机构脱出鞘管300,进而避免后释放机构划伤血管内膜,避免鞘管、后释放机构、导向头依次从股动脉切口处撤出时尺寸突变、操作困难。
76.实施例3
77.一种实现介入支架快慢速释放的输送器,如图18所示,包括导向头100、鞘管300、螺杆500和上述手柄;从近端到远端,所述螺杆500包括第一定位轴510、按钮台肩520和梯形螺纹轴530,所述弧形卡套固定于所述第一定位轴510并与所述按钮台肩520的远端相齐平;所述螺杆套420滑动套接在所述梯形螺纹轴530;所述按钮台肩520上对应所述按钮464的位置设有按钮槽521,使得所述按钮464的自由端可向内倾斜而滑出或卡入所述卡环450;所述螺杆500内设有用于容纳鞘管接头441的轴向通孔,与鞘管接头441的外柱面为间隙配合。所
述梯形螺纹轴530沿轴向开有鞘管接头导向槽531。鞘管接头441可在螺杆500内沿鞘管接头导向槽531自由移动,不能转动。
78.所述螺杆500的第一定位轴510设有鞘管套定位孔511,带有台肩的鞘管套470穿过弧形卡套460近端的定位孔卡接入鞘管套定位孔511,鞘管300穿过鞘管套470后连接鞘管接头441,将鞘管300及其内的中管900和芯管800定位在螺杆500的轴线附近。
79.为了方便螺杆500内部零件的装配,螺杆500实际由左右对称的两半轴拼接在一起组成。
80.应当指出,以上所述具体实施方式可以使本领域的技术人员更全面地理解本发明,但不以任何方式限制本发明。因此,尽管本说明书参照附图和实施例对本发明已进行了详细的说明,但是,本领域技术人员应当理解,仍然可以对本发明进行修改或者等同替换,总之,一切不脱离本发明的精神和范围的技术方案及其改变,其均应涵盖在本发明专利的保护范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
