传动机构
1.本发明涉及传动机构。
2.变速器通常被认为是用于转换运动量的机械元件。为此,变速器包括驱动侧和输出侧,驱动单元的运动量被传递到驱动侧,输出侧联接到作业机械。传动机构以特定的传动比将从驱动单元输入的运动量传递到作业机械。
3.作为变速器,所谓的齿轮传动装置是已知的,例如,在最简单的情况下,其具有两个大齿轮,这两个大齿轮能够以形状配合的方式彼此形成接合。大齿轮具有齿,这些齿均匀地分布在大齿轮的圆周上,并且通过间隙彼此分开。
4.这种齿轮传动装置用于例如车辆变速器中,借助于该齿轮传动装置,发动机(例如内燃发动机)的旋转速度被转换成车辆的驱动模式所需的车轮旋转速度。特别地,从发动机输入的扭矩被传递到变速器输入轴,在该变速器输入轴上布置有多对大齿轮。一对大齿轮形成齿轮级的传动比。扭矩以合适的传动比传递到联接到输出端的变速器输出轴。例如,车辆变速器可以设计为手动变速器、自动化变速器或自动变速器。
5.例如,在自动化变速器中,变速器输入轴和变速器输出轴(也称为主轴)彼此同轴地延伸,并且它们联接到轴向地平行的副轴。主轴和副轴可以通过接合能够由外力致动的离合器单元经由具有不同传动比的多对大齿轮(例如,在每种情况下,不可旋转地布置在副轴上的固定齿轮和可旋转地安装在主轴上的可移动齿轮)选择性地彼此形成接合。离合器单元例如布置在所讨论的可移动齿轮和主轴之间,并且具有带有齿部的离合器元件,借助于该齿部,离合器元件可以以形状配合的方式与对应的可移动齿轮形成接合。结果,可移动齿轮可以不可旋转地连接到主轴。为了可移动齿轮和离合器单元之间的形状配合接合,需要可移动齿轮的齿部和离合器齿部之间的齿上齿间隙(tooth
‑
on
‑
tooth
‑
gap)位置。
6.本发明基于提供相对于现有技术改进的传动机构的目的。
7.根据本发明,该目的通过权利要求1中规定的特征来实现。
8.在根据本发明的传动机构的情况下,该传动机构用于具有至少两个大齿轮的变速器,该至少两个大齿轮可以彼此形成形状配合接合,其中一个大齿轮被设计为可移动齿轮,并且在脱离位置以可自由旋转的方式布置在传动轴上。另一个大齿轮被设计为固定齿轮,并且不可旋转地布置在另一个传动轴上。在此,可移动齿轮能够借助于离合器单元不可旋转地连接到传动轴,并且因此,如果离合器齿部在齿上齿间隙位置以形状配合的方式接合在可移动齿轮的齿部中,则至少一个变速器齿轮可被接合。这里的离合器齿部是指离合器单元的齿部,特别是齿廓。此外,提供了一种传感器装置,借助于该传感器装置,输入另一传动轴的旋转速度信号和从传动轴输出的旋转速度信号是可检测的,其中,该传感器装置联接到控制单元,借助于该控制单元,对于相应旋转速度信号中的每个检测到的边缘,可以确定和存储时间戳,并且借助于该时间戳,可移动齿轮的齿部相对于传动轴的角向位置可以在至少一个变速器齿轮的初始接合之后确定,并且可以分配给该时间戳。使用时间戳和分配给时间戳的角向位置,随后可以确定可移动齿轮的齿部和离合器齿部之间的绝对角向关系。
9.传动机构允许可移动齿轮和离合器单元之间可靠且简单并且也快速的形状配合
连接。如果变速器是车辆变速器,则通过仅在可靠地检测到或已经检测到齿上齿间隙位置时才发生的形状配合连接,传动机构缩短了变速器齿轮的接合并降低了在该过程中出现的噪音。因此可以避免可移动齿轮和离合器单元之间的卡住和/或延迟的形状配合连接。这导致快速和舒适的(特别是低噪音的)换档操作,并且扭矩损失降低。
10.根据一个示例性实施例,控制单元根据绝对角向关系启动离合器单元。
11.这里,控制单元可以特别连续地或者例如以事件控制或时间控制的方式监测可移动齿轮和离合器单元之间的离合器区域。特别地,控制单元可以使用绝对角向关系来确定可移动齿轮的齿部和离合器齿部之间的齿上齿间隙位置,其中,离合器单元以离合器单元和可移动齿轮留在检测位置的方式被启动。另一方面,如果控制单元确定齿前齿位置,则离合器单元相对于可移动齿轮移动,特别是逐步旋转到齿上齿间隙位置。
12.控制单元例如是机动车辆的变速器控制单元。
13.根据另一示例性实施例,传感器装置具有至少两个旋转速度传感器。一个旋转速度传感器检测输入另一个传动轴的旋转速度信号,并且另一个旋转速度传感器检测从传动轴输出的旋转速度信号。
14.可以使用旋转速度传感器检测在变速器输入端和变速器输出端处的当前旋转速度。为此,一个旋转速度传感器布置在变速器输入轴处或变速器输入轴上,并且另一个旋转速度传感器布置在变速器输出轴处或变速器输出轴上。控制单元可以使用借助于旋转速度传感器检测的旋转速度信号来确定在至少一个变速器齿轮已经初始接合之后在可移动齿轮的齿部和离合器齿部以及因此相关的传动轴之间的绝对角向关系,特别是角向位置。即使在至少一个变速器齿轮已经脱离之后,也可以连续地确定绝对角向关系。
15.根据一个示例性实施例,旋转速度传感器各自被设计为霍尔传感器。例如,为此目的,磁体附接到至少一个可移动齿轮(或布置在变速器输入轴上的另一个大齿轮),借助于该磁体,可移动齿轮被设计为例如具有磁偶极子的所谓的磁体轮。当可移动齿轮旋转时,产生旋转磁场,磁场的大小随齿和齿间隙而变化。这可以借助于霍尔传感器来检测,霍尔传感器可以布置在变速器中的另一个位置处,例如在控制单元中。备选地,也可以使用所谓的反向偏置霍尔传感器,其直接在对应的大齿轮处检测旋转速度信号。此外,旋转速度传感器也可以被设计为感应传感器。
16.在另一个示例性实施例中,离合器单元被设计为爪形离合器。特别地,离合器单元形成为两部分,并且具有第一爪元件和第二爪元件,其中,第一爪元件不可旋转地连接到传动轴,并且其中,第二爪元件与可移动齿轮一体地形成。特别地,第一爪元件布置成使得其与传动轴一起旋转,但是能够相对于传动轴轴向地移位。由于第一爪元件不可旋转地连接到传动轴,离合器齿部相对于传动轴的位置不改变。结果,可移动齿轮的齿部的位置(特别是角向位置)可以基于旋转速度传感器的评估来检测和/或确定。在这种情况下,可移动齿轮例如一体地连接到第二爪元件,并且因此可移动齿轮的齿部对应于第一爪元件的齿部。
17.根据另一个示例性实施例,变速器是车辆变速器。因此,传动机构可以用于机动车辆中,以增加驾驶舒适性。
18.下面参照附图更详细地解释本发明的示例性实施例,在附图中:图1示意性地示出了具有传动机构的变速器,以及
图2示意性地示出了在变速器的可移动齿轮和爪元件之间的形状配合连接的俯视图的细节。
19.在所有附图中,相互对应的零件具有相同的附图标记。
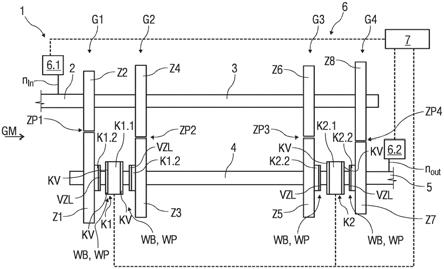
20.图1示意性地示出了具有传动机构gm的变速器1。
21.变速器1具有变速器输入轴2,其联接到驱动单元(未具体示出),例如内燃发动机。变速器输入轴2形成驱动轴和因此变速器1的驱动侧。
22.根据所示的示例性实施例,变速器1是车辆变速器,并且基于自动变速器,在该变速器中布置有平行于第一传动轴3延伸的第二传动轴4。第一传动轴3也被称为副轴,并且相对于变速器输入轴2同轴地布置。在所示的示例性实施例中,变速器输入轴2和第一传动轴3被一体地描绘。备选地,这些轴也可以单独地形成并彼此连接。第二传动轴4形成变速器1的输出轴,并且相对于变速器输出轴5同轴地布置。第二传动轴4和变速器输出轴5也被一体地描绘。备选地,这些轴也可以单独地形成并彼此连接。
23.变速器输入轴2和第二传动轴4借助于包括大齿轮z1、z2的第一对大齿轮zp1彼此机械地联接。在所示的示例性实施例中,变速器1具有总共四对大齿轮zp1至zp4和因此四个可接合的变速器齿轮g1至g4,也称为变速器级或齿轮级。备选地,变速器1也可以具有少于四个或多于四个的可接合变速器齿轮g1至g4。
24.第一传动轴3也机械地联接到第二传动轴4。为此,另外的大齿轮z3、z5、z7布置在第二传动轴4上,所述另外的大齿轮与布置在第一传动轴3上的另外的大齿轮z4、z6、z8成对地持续接合,并且因此为变速器齿轮g1至g4提供不同的传动比。
25.在每对大齿轮zp1至zp4中,大齿轮z2、z4、z6、z8各自不可旋转地布置在第一传动轴3上,并且因此还被称为固定齿轮z2、z4、z6、z8。其他大齿轮z1、z3、z5、z7各自以自由旋转且轴向地固定的方式布置在设计为空心轴的第二传动轴4的区段上,并且因此在下文中被称为可移动齿轮z1、z3、z5、z7。
26.第一离合器单元k1布置在可移动齿轮z1、z3之间。此外,第二离合器单元k2布置在可移动齿轮z5、z7之间。离合器单元k1、k2用于换档,特别是接合变速器齿轮g1至g4,并且各自被设计为所谓的爪形离合器。
27.离合器单元k1、k2各自具有第一爪元件k1.1、k2.1,其不可旋转地布置在第二传动轴4上。特别地,第一爪元件k1.1、k2.1布置成使得其与第二传动轴4一起旋转,但是能够相对于第二传动轴4轴向地移位。
28.此外,离合器单元k1、k2各自具有两个第二爪元件k1.2、k2.2,这两个第二爪元件各自与第一爪元件k1.1、k2.1同轴相对地布置在第二传动轴4上。此外,第二爪元件k1.2和k2.2与可移动齿轮z1、z3、z5、z7一体地形成。
29.第一爪元件k1.1、k2.1的各自面向可移动齿轮z1、z3、z5、z7的那些表面具有离合器齿部kv,该离合器齿部kv在图1中和图2的截面中抽象地示出。同样,对应的齿部vzl形成在第二爪元件k1.2、k2.2的各自面向第一爪元件k1.1、k2.1的那些表面上,并且因此第一爪元件k1.1、k2.1可以以形状配合的方式与第二爪元件k1.2、k2.2形成接合,并且因此与可移动齿轮z1、z3、z5、z7形成接合。
30.在所示的示例性实施例中,两个离合器单元k1、k2都以打开状态示出。也就是说,变速器1处于空档位置,可移动齿轮z1、z3、z5、z7都没有连接到第二传动轴4。
31.为了接合第一变速器齿轮g1,第一离合器单元k1在第一变速器齿轮g1的可移动齿轮z1的方向上移动。在齿上齿间隙位置zls(如图2所示),布置在第一爪元件k1.1上的离合器齿部kv以形状配合的方式与第二爪元件k1.2的齿部vzl形成接合,第二爪元件k1.2与可移动齿轮z1一体地形成。
32.结果,可移动齿轮z1不可旋转地连接到第二传动轴4,并且第二传动轴4借助于第一对大齿轮zp1功能性地联接到变速器输入轴2。因此,第二传动轴4经由第一对大齿轮zp1从变速器输入轴2开始被驱动。
33.通过换档随后的变速器齿轮g2至g4,扭矩从第一传动轴3传递至第二传动轴4。该扭矩然后经由相对于第二传动轴4同轴地布置的变速器输出轴5传递到输出单元(未示出),该输出单元例如包括差速变速器,该差速变速器驱动用于车辆的驱动轮(例如前驱动轮)的车轴驱动轴。
34.第二爪元件k1.2、k2.2的齿部vzl和第一爪元件k1.1、k2.1上的离合器齿部kv之间的形状配合连接发生在所谓的齿上齿间隙位置zls(参见图2),在该位置中,例如,离合器齿部kv的齿以形状配合的方式接合在齿部vzl的齿间隙中。另一方面,如果两个齿(齿部vzl中的一个和离合器齿部kv中的一个)相遇,这可能导致齿部vzl卡住或延迟的形状配合连接。这一点在驾驶模式下由于长时间且高噪音的换档操作而非常明显。
35.为了减少这样的问题,传动机构gm提供了传感器装置6和联接到其的控制单元7,并且借助于该控制单元可以确定可移动齿轮z3、z5、z7的齿部vzl和离合器齿部kv之间的绝对角向关系wb,并且由此也可以确定齿部vzl和离合器齿部kv之间的离合器位置,特别是齿上齿间隙位置zls或齿上齿位置(未示出)。特别地,齿部vzl和离合器齿部kv之间的离合器区域因此可以针对它们的离合器位置进行监测,特别是关于它们的齿是处于齿上齿间隙位置zls还是齿前齿位置。特别地,传感器装置6和控制单元7检测和/或确定第一爪元件k1.1、k2.1和第二爪元件k1.2、k2.2是否相对于彼此定位在齿上齿间隙位置zls中。
36.在所示的示例性实施例中,传感器装置6包括联接到变速器输入轴2的第一旋转速度传感器6.1和联接到变速器输出轴5的第二旋转速度传感器6.2,变速器输出轴5形成变速器输出侧。旋转速度传感器6.1、6.2均为例如霍尔传感器或感应传感器,并且检测变速器输入轴2或变速器输出轴5的旋转速度。
37.旋转速度传感器6.1、6.2也连接到控制单元7,控制单元7例如是车辆的变速器控制单元。控制单元7评估借助于旋转速度传感器6.1、6.2检测到的信号,特别是输入旋转速度信号n
in
和输出旋转速度信号n
out
,其描绘了变速器输入轴2和变速器输出轴5的旋转速度。
38.在评估旋转速度信号n
in
、n
out
期间,为信号中的每个边缘存储时间戳。换句话说:每个信号边缘可以被分配到固定的时间点。
39.在评估检测到的旋转速度信号n
in
、n
out
期间,对于旋转速度信号n
in
、n
out
中的边缘的每个存储的时间戳,检测可移动齿轮z3、z5、z7的齿部vzl,特别是第二爪元件k1.2、k2.2,相对于第二传动轴4的位置,特别是角向位置wp,并且该角向位置wp被分配给时间戳。由于第一爪元件k1.1、k2.1在第二传动轴4上的不可旋转的布置,离合器齿部kv的位置参照旋转速度传感器6.1、6.2的评估旋转速度信号n
in
、n
out
是已知的,因此在变速器齿轮g1至g4(例如第一变速器齿轮g1)的初始接合之后,有可能确定第二爪元件k1.2、k2.2的齿部vzl和第一爪元件k1.1、k2.1的离合器齿部kv之间的绝对角向关系wb,特别是角向位置wp。
40.如果控制单元7确定了图2所示的齿上齿间隙位置zls,则所述控制单元启动离合器单元k1、k2以接合对应的变速器齿轮g1至g4,使得第一爪元件k1.1、k2.1以形状配合的方式实际上无干涉地接合在第二爪元件k1.2、k2.2中。另一方面,如果控制单元7确定齿前齿位置(未示出),则离合器单元k1、k2相对于可移动齿轮z3、z5、z7移动,特别是逐步旋转到齿上齿间隙位置zls。
41.控制单元7特别连续地或者例如以事件控制或时间控制的方式监测可移动齿轮z3、z5、z7和离合器单元k1、k2之间的离合器区域。特别地,控制单元7可以使用绝对角向关系wb来确定齿上齿间隙位置zls,即使在脱离先前初始接合的变速器齿轮g1至g4之后。
42.图2示意性地示出了齿部vzl和离合器齿部kv之间的齿上齿间隙位置zls的俯视图的细节。例如,示出了第一爪元件k1.1和第二爪元件k1.2之间的齿上齿间隙位置zls。齿部vzl、kv的侧面在这里竖直地示出。此外,侧面可以设置有底切,使得它们基本上被构造成燕尾形。
43.借助于所描述的传动机构gm,离合器单元k1、k2和因此变速器齿轮g1至g4的接合因此可以根据可移动齿轮z1、z3、z5、z7的或第二爪元件k1.2、k2.2的齿部vz1相对于第一爪元件k1.1、k2.1的离合器齿部kv的位置而被启动。
44.附图标记列表1 变速器2 变速器输入轴3 第一传动轴4 第二传动轴5 变速器输出轴6 传感器装置6.1, 6.2 旋转速度传感器7 控制单元g1至g4 变速器齿轮gm 传动机构k1, k2 离合器单元k1.1, k2.1 第一爪元件k1.2, k2.2 第二爪元件kv 离合器齿部n
in 输入的旋转速度信号n
out 输出的旋转速度信号vzl 齿部wp 角向位置wb 角向关系z1至z8 大齿轮z1, z3, z5, z7 可移动齿轮z2, z4, z6, z8 固定齿轮zp1至zp4 大齿轮对
zls 齿上齿间隙位置。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
