技术特征:
1.一种自动驾驶测试系统,其特征在于,所述系统包括:上位机、测试台架、自动驾驶域控制器、组合导航模块和全球卫星导航系统模拟器;所述上位机用于生成虚拟场景数据,并将所述虚拟场景数据发送给测试台架;以及根据所述虚拟场景数据生成位置关联射频信号和相对定位数据,并通过测试台架将所述位置关联射频信号发送给全球卫星导航系统模拟器,将所述相对定位数据发送给组合导航模块;所述测试台架用于实时获取自动驾驶域控制器发送的车辆控制数据,根据所述虚拟场景数据和所述车辆控制数据进行感知分析处理,生成第一感知数据,并将所述第一感知数据发送给自动驾驶域控制器;所述全球卫星导航系统模拟器用于根据所述位置关联射频信号,生成绝对定位数据,并将所述绝对定位数据发送给所述组合导航模块;所述组合导航模块用于根据所述绝对定位数据和所述相对定位数据,生成第二感知数据,并将所述第二感知数据发送给所述自动驾驶域控制器;所述自动驾驶域控制器用于基于所述第一感知数据和所述第二感知数据,进行自动驾驶控制分析,生成当前的车辆控制数据,并将所述当前的车辆控制数据发送给所述测试台架,直至满足预设条件时,确定当前的第二感知数据、当前的车辆控制数据或当前的轨迹数据中至少一种作为测试结果,并基于所述测试结果对所述自动驾驶域控制器进行调整。2.根据权利要求1所述的系统,其特征在于,所述系统还包括数据转换模块;所述上位机进一步用于根据所述虚拟场景数据生成所述位置关联射频信号和所述相对定位数据;以及通过所述测试台架将所述位置关联射频信号发送给所述全球卫星导航系统模拟器;以及,将所述相对定位数据发送给数据转换模块;所述全球卫星导航系统模拟器用于根据所述位置关联射频信号,生成绝对定位数据和相对定位数据,并将所述绝对定位数据发送给组合导航模块,将所述相对定位数据发送给所述数据转换模块;所述数据转换模块用于将所述相对定位数据进行数据转换,得到目标格式的相对定位数据,并将所述目标格式的相对定位数据发送给所述组合导航模块;所述组合导航模块用于根据所述绝对定位数据和所述目标格式的相对定位数据,生成第二感知数据,并将所述第二感知数据发送给所述自动驾驶域控制器。3.根据权利要求1所述的系统,其特征在于,所述上位机进一步用于获取预设范围内的目标地图数据;以及,根据所述目标地图数据进行多径反射处理,生成多径虚拟场景数据;以及,将所述目标地图数据和所述多径虚拟场景数据进行匹配融合,生成所述虚拟场景数据,并将所述虚拟场景数据发送给所述测试台架。4.根据权利要求1所述的系统,其特征在于,所述上位机进一步用于获取当前定位数据;所述自动驾驶域控制器进一步用于在所述当前的第二感知数据和所述当前定位数据满足第一预设条件时,将所述当前的第二感知数据作为测试结果,并基于所述测试结果对所述自动驾驶域控制器进行调整。5.根据权利要求1所述的系统,其特征在于,所述自动驾驶域控制器进一步用于在所述
当前的车辆控制数据满足第二预设条件时,将所述当前的车辆控制数据作为测试结果,并基于所述测试结果对所述自动驾驶域控制器进行调整。6.根据权利要求1所述的系统,其特征在于,所述上位机包括第一上位机和第二上位机;所述第二上位机的算力高于所述第一上位机;所述第一上位机用于生成虚拟场景数据,并将所述虚拟场景数据发送给所述测试台架;所述第二上位机用于根据所述虚拟场景数据模拟生成所述位置关联射频信号,并通过所述测试台架将所述位置关联射频信号发送给所述全球卫星导航系统模拟器。7.一种自动驾驶测试方法,其特征在于,所述方法包括:上位机生成虚拟场景数据,并将所述虚拟场景数据发送给测试台架;所述上位机根据所述虚拟场景数据生成位置关联射频信号和相对定位数据,并通过测试台架将所述位置关联射频信号发送给全球卫星导航系统模拟器,将所述相对定位数据发送给组合导航模块;所述测试台架实时获取自动驾驶域控制器发送的车辆控制数据,根据所述虚拟场景数据和所述车辆控制数据进行感知分析处理,生成第一感知数据,并将所述第一感知数据发送给自动驾驶域控制器;所述全球卫星导航系统模拟器根据所述位置关联射频信号,生成绝对定位数据,并将所述绝对定位数据发送给所述组合导航模块;所述组合导航模块根据所述绝对定位数据和所述相对定位数据,生成第二感知数据,并将所述第二感知数据发送给所述自动驾驶域控制器;所述自动驾驶域控制器基于所述第一感知数据和所述第二感知数据,进行自动驾驶控制分析,生成车辆控制数据,并将所述车辆控制数据发送给所述测试台架,直至满足预设条件时,确定当前的第二感知数据、当前的车辆控制数据或当前的轨迹数据中至少一种作为测试结果,并基于所述测试结果对所述自动驾驶域控制器进行调整。8.根据权利要求7所述的方法,其特征在于,所述上位机生成虚拟场景数据,并将所述虚拟场景数据发送给测试台架包括:所述上位机获取预设范围内的目标地图数据;所述上位机根据所述目标地图数据进行多径反射处理,生成多径虚拟场景数据;所述上位机将所述目标地图数据和所述多径虚拟场景数据进行匹配融合,生成所述虚拟场景数据,并将所述虚拟场景数据发送给所述测试台架。9.根据权利要求7所述的方法,其特征在于,所述上位机根据所述虚拟场景数据生成位置关联射频信号和相对定位数据,并通过测试台架将所述位置关联射频信号发送给全球卫星导航系统模拟器,将所述相对定位数据发送给组合导航模块包括:所述上位机根据所述虚拟场景数据生成所述位置关联射频信号和所述相对定位数据;所述上位机通过所述测试台架将所述位置关联射频信号发送给所述全球卫星导航系统模拟器;所述全球卫星导航系统模拟器根据所述位置关联射频信号,生成卫星射频信号,并将所述卫星射频信号作为绝对定位数据发送给所述组合导航模块;
所述上位机将所述相对定位数据发送给数据转换模块;所述数据转换模块对所述相对定位数据进行数据格式转换,得到目标格式的相对定位数据,并将所述目标格式的相对定位数据发送给所述组合导航模块。10.根据权利要求7所述的方法,其特征在于,所述方法还包括:所述上位机获取当前定位数据;所述满足预设条件时,确定当前的第二感知数据、当前的车辆控制数据或当前的轨迹数据中至少一种作为测试结果,并基于所述测试结果对所述自动驾驶域控制器进行调整包括:在所述当前的第二感知数据和所述当前定位数据满足第一预设条件时,将所述当前的第二感知数据作为测试结果,并基于所述测试结果对所述自动驾驶域控制器进行调整。11.根据权利要求7所述的方法,其特征在于,所述满足预设条件时,确定当前的第二感知数据、当前的车辆控制数据或当前的轨迹数据中至少一种作为测试结果,并基于所述测试结果对所述自动驾驶域控制器进行调整包括:在所述当前的车辆控制数据满足第二预设条件时,将所述当前的车辆控制数据作为测试结果,并基于所述测试结果对所述自动驾驶域控制器进行调整。12.根据权利要求7所述的方法,其特征在于,所述第一感知数据包括:视频帧数据、总线仿真数据、io信号和故障模拟信号。13.根据权利要求12所述的方法,其特征在于,所述总线仿真数据包括:毫米波雷达数据、超声波雷达数据和目标控制器数据。
技术总结
本申请公开一种自动驾驶测试系统和方法,本申请通过上位机生成虚拟场景数据,生成位置关联射频信号和相对定位数据,测试台架根据获取的车辆控制数据和虚拟场景数据生成第一感知数据,全球卫星导航系统模拟器根据位置关联射频信号,生成绝对定位数据,再由组合导航模块根据绝对定位数据和相对定位数据,生成第二感知数据,可以得到自动驾驶域控制器进行自动驾驶控制分析所需的更为全面的感知数据,自动驾驶域控制器基于第一感知数据和第二感知数据,进行自动驾驶控制分析,生成车辆控制数据,从而产生更为真实的车辆控制数据,使得车辆控制数据更加具有参考价值,测试结果更为客观,提高自动驾驶测试的安全性和可靠性。提高自动驾驶测试的安全性和可靠性。提高自动驾驶测试的安全性和可靠性。
技术研发人员:杨彦召 李浩 张超
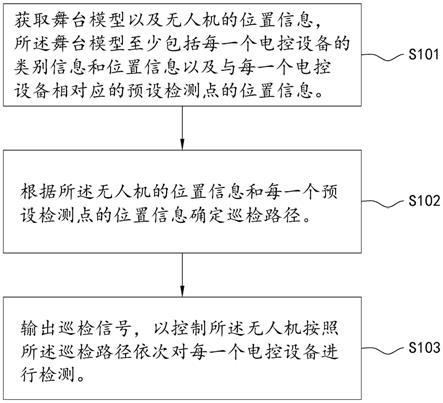
受保护的技术使用者:中汽创智科技有限公司
技术研发日:2021.07.26
技术公布日:2021/11/8
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。