1.本发明涉及医疗设备技术领域,尤其涉及一种手术植入物全自动清洗装置。
背景技术:
2.目前,当遇到骨折或骨裂等伤情的患者时,通常需要采用骨钉或者骨板等物品对患者伤处进行固定,等到患者恢复在将其取出。这种手术的切口小,对患者自身损害较小,且操作简单,技术成熟。
3.现有的骨钉、骨板在被生产后需要进行清洗以保证清洁度,现有的清洗设备通常是人工将骨钉、骨板等放置于清洗仓中,待清洗完毕后再人工使用工具取出,每个清洗步骤均需要人工使用工具参与,现有技术在使用工具取出时由于工具容易造成二次污染,影响清洗效果。
4.因此,本领域亟需一种手术植入物全自动清洗装置。
5.因此,有鉴于此,提出本发明。
技术实现要素:
6.本发明的目的在于提供一种手术植入物全自动清洗装置,防止二次污染,提高清洗效果。
7.本发明提供了一种手术植入物全自动清洗装置,包括:
8.装载架,所述装载架设置有容纳槽,将手术植入物放入容纳槽中进行清洗;
9.清洗柜,所述清洗柜设置有多个用于对手术植入物进行清洗的清洗槽,所述清洗槽能够容纳所述装载架;
10.机械臂,所述机械臂能够将装载架放入及取出清洗槽,并将装载架在各个清洗槽之间移动,所述机械臂还包括机械手,所述机械手能够与装载架配合可拆卸连接。
11.采用上述方案,当需要对手术植入物进行清洗时,将手术植入物放置于装载架的容纳槽内,并在清洗槽放入清洗液,通过机械手与装载架连接,所述机械臂将装载架在各个清洗槽之间移动,能够完成不同的清洗项目,所述机械臂能够将装载架放入及取出清洗槽,进而能够将放置在容纳槽的手术植入物取出,避免在取出时再使用工具造成二次污染。
12.进一步地,所述清洗槽包括浸泡槽,所述浸泡槽侧壁设置有悬挂件,所述悬挂件设置有卡勾,所述卡勾用于与装载架相配合,使所述清洗槽悬置在清洗槽内部空间中。
13.采用上述方案,使所述清洗槽悬置在清洗槽内部空间中,增大手术植入物与清洗液的接触面积,提高清洗效果。
14.优选地,所述悬挂件还设置有转轴,所述转轴与卡勾相连接,当所述卡勾与装载架相配合时,所述转轴旋转调节所述装载架高度。
15.采用上述方案,所述转轴旋转能调节所述装载架高度,进而调节清洗槽高度,根据清洗液液面高度调节清洗槽高度,当液面较低时可以根据实际情况降低清洗槽高度,节约清洗液。
16.进一步地,所述清洗槽还包括烘干槽,所述烘干槽设置有停靠沿,当所述装载架置于所述烘干槽内时,所述装载架上端与所述停靠沿相配合。
17.采用上述方案,所述装载架上端与所述停靠沿相配合,使所述装载架悬置与烘干槽内,提高烘干效率。
18.进一步地,所述装载架还设置有固定杆和连接杆,所述连接杆同时与固定杆和容纳槽相连接,所述固定杆能够与停靠沿或卡勾相配合。
19.进一步地,所述手术植入物全自动清洗装置还包括移动装置,所述移动装置包括横向移动结构和纵向移动结构,所述横向移动结构设置有横向移动杆,所述纵向移动结构设置有纵向移动杆,所述纵向移动杆设置有第一滑块,所述第一滑块与横向移动杆相配合使所述纵向移动杆沿横向滑轨滑动。
20.采用上述方案,所述机械臂与纵向移动杆连接,纵向移动杆能带动所述机械臂移动。
21.进一步地,所述机械臂设置有第二滑块,所述纵向移动杆设置有纵向滑杆,所述第二滑块与纵向滑杆相配合使所述机械臂沿纵向滑杆上下滑动。
22.采用上述方案,便于提起或放下所述装载架。
23.进一步地,所述机械手包括连接臂和挂钩,所述连接臂与挂钩相连接,所述连接臂与第二滑块相连接,所述挂钩用于与所述装载架相配合,使机械臂带动装载架移动。
24.采用上述方案,使用挂钩与转载架的固定杆相配合,便于移动装载架。
25.进一步地,所述固定杆上设置有b型板,所述b型板与所述挂钩相配合。
26.采用上述方案,放置挂钩钩动位置变化,发生滑动。
27.优选地,所述清洗柜侧边设置有停靠架,所述装载架能够放置于停靠架上。
28.采用上述方案,当需要进行清洗工作时,将所述装载架能够放置于停靠架上,将手术植入物固定于装载架,再由机械臂移动至各个槽。
29.进一步地,所述手术植入物全自动清洗装置还包括外壳体,所述装载架、清洗柜及机械臂均设置在所述外壳体内。
30.采用上述方案,所述外壳体能够容纳所述装载架、清洗柜及机械臂,放置在进行清洗工作时外部环境影响清洗效果。
31.优选地,所述清洗柜两侧均设置有停靠架,所述外壳体两侧设置有投料口和出料口,所述投料口和出料口的设置位置与停靠架相对应,手术植入物通过投料口被放置在装载架上,清洗后的手术植入物从出料口被取出。
32.采用上述方案,工作人员只需将待清洗的手术植入物从投料口放入,再从出料口取出即可完成清洗,提高清洗便捷性。
33.进一步地,所述外壳体还设置有观察窗,所述观察窗的位置高于清洗柜。
34.采用上述方案,便于观察清洗过程。
35.进一步地,所述外壳体顶部设置有顶板,所述顶板下方设置有与顶板相连接的辅助滑杆,所述纵向移动杆顶部设置有第三滑块,所述第三滑块与辅助滑杆相配合。
36.采用上述方案,当所述纵向移动杆横向移动时,与设置在不同位置的辅助滑杆和横向滑杆均相配合,所述辅助滑杆设置于所述纵向移动杆顶部,防止纵向移动杆发生纵向移动。
37.进一步地,所述浸泡槽侧壁设置有通气孔,便于出所述溶剂槽内的腐蚀性气体
38.进一步地,所述清洗槽设置有传感器,所述传感器包括但不限于温度传感器、溶液浓度测试仪、电流传感器、电压传感器,用于对装置的参数进行监测。
39.优选地,所述手术植入物全自动清洗装置还设置有报警器,所述手术植入物全自动清洗装置对清洗槽均设置有温度阈值,当超过或低于温度阈值时,所述报警器报警;所述清洗槽还设置有溶液浓度阈值当槽内溶液超过或低于溶液浓度阈值时,所述报警器报警。
40.采用上述方案,防止机器发生异常运行,防止对手术植入物造成损害。
41.进一步地,所述手术植入物全自动清洗装置还设置有中控装置,所述中空装置内部设置有处理器,所述处理器内部设置有计算机程序,所述手术植入物全自动清洗装置按照程序,依照程序对应的清洗步骤,对手术植入物进行清洗。
42.综上所述,本发明具有以下有益效果:
43.1、本发明的手术植入物全自动清洗装置,当需要对手术植入物进行清洗时,将手术植入物放置于装载架的容纳槽内,并在清洗槽放入清洗液,通过机械手与装载架连接,所述机械臂将装载架在各个清洗槽之间移动,能够完成不同的清洗项目,所述机械臂能够将装载架放入及取出清洗槽,进而能够将放置在容纳槽的手术植入物取出,避免在取出时再使用工具造成二次污染;
44.2、本发明的手术植入物全自动清洗装置,所述转轴旋转能调节所述装载架高度,进而调节清洗槽高度,根据清洗液液面高度调节清洗槽高度,当液面较低时可以根据实际情况降低清洗槽高度,节约清洗液;
45.3、本发明的手术植入物全自动清洗装置,所述外壳体能够容纳所述装载架、清洗柜及机械臂,放置在进行清洗工作时外部环境影响清洗效果;
46.4、本发明的手术植入物全自动清洗装置,当所述纵向移动杆横向移动时,与设置在不同位置的辅助滑杆和横向滑杆均相配合,所述辅助滑杆设置于所述纵向移动杆顶部,防止纵向移动杆发生纵向移动。
附图说明
47.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
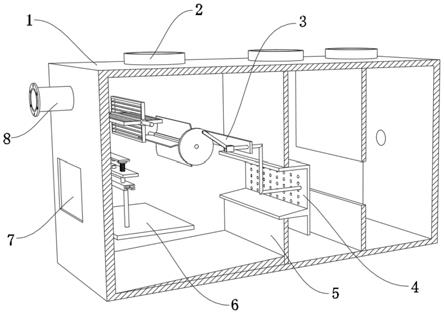
48.图1为本发明手术植入物全自动清洗装置第一种实施方式的正视结构示意图;
49.图2为图1沿a
‑
a的剖视图;
50.图3为图1沿c
‑
c的剖视图;
51.图4为图3中a处的局部放大图;
52.图5为所述装载架和机械臂的连接结构示意图;
53.图6为本发明手术植入物全自动清洗装置第二种实施方式的侧视结构示意图;
54.图7为图6沿d
‑
d的剖视图;
55.图8为图6沿e
‑
e的剖视图;
56.图9为图8中b处的局部放大图。
57.附图标记说明
58.通过上述附图标记说明,结合本发明的实施例,可以更加清楚的理解和说明本发明的技术方案。
59.1、装载架;11、容纳槽;12、固定杆;121、b型板;13、连接杆;2、清洗柜;21、浸泡槽;22、烘干槽;221、停靠沿;23、悬挂件;231、卡勾;232、转轴;24、停靠架;3、机械臂;31、机械手;311、连接臂;312、挂钩;32、第二滑块;4、移动装置;41、横向移动杆;42、纵向移动杆;421、第一滑块;422、纵向滑杆;4221、第三滑块;5、外壳体;51、出料口;52、投料口;53、观察窗;54、顶板;55、辅助滑杆;56、清洁仓;57、隔断门;58、出料门;
具体实施方式
60.这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本发明相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本发明的一些方面相一致的装置和方法的例子。
61.在本发明使用的术语是仅仅出于描述特定实施例的目的,而非旨在限制本发明。在本发明和所附权利要求书中所使用的单数形式的“一种”、“所述”和“该”也旨在包括多数形式,除非上下文清楚地表示其他含义。还应当理解,本文中使用的术语“和/或”是指并包含一个或多个相关联的列出项目的任何或所有可能组合。
62.如图1、2、5所示,本发明提供了一种手术植入物全自动清洗装置,包括:
63.装载架1,所述装载架1设置有容纳槽11,将手术植入物放入容纳槽11中进行清洗;
64.在具体实施过程中,所述容纳槽11由金属杆和金属网构成,所述金属杆和金属网相连接形成容纳槽11,清洗液由网孔进入容纳槽11,对放置在其中的手术植入物进行清洗。
65.清洗柜2,所述清洗柜2设置有多个用于对手术植入物进行清洗的清洗槽,所述清洗槽能够容纳所述装载架1;
66.在具体实施过程中,多个所述清洗槽中所盛放的清洗液可以为不同的清洗液,以完成不同的清洗项目。
67.所述清洗液可以为酸性溶液或者碱性溶液。
68.机械臂3,所述机械臂3能够将装载架1放入及取出清洗槽,并将装载架1在各个清洗槽之间移动,所述机械臂3还包括机械手31,所述机械手31能够与装载架1配合可拆卸连接。
69.采用上述方案,当需要对手术植入物进行清洗时,将手术植入物放置于装载架1的容纳槽11内,并在清洗槽放入清洗液,通过机械手31与装载架1连接,所述机械臂3将装载架1在各个清洗槽之间移动,能够完成不同的清洗项目,所述机械臂3能够将装载架1放入及取出清洗槽,进而能够将放置在容纳槽11的手术植入物取出,避免在取出时再使用工具造成二次污染。
70.所述手术植入物包括但不限于骨钉、骨板。
71.如图3、4、7所示,在具体实施过程中,所述清洗槽包括浸泡槽21,所述浸泡槽21侧壁设置有悬挂件23,所述悬挂件23设置有卡勾231,所述卡勾231用于与装载架1相配合,使所述清洗槽悬置在清洗槽内部空间中。
72.在本发明一个优选的实施方式中,所述卡勾231为带有沟槽的板结构,提高结构强度。
73.采用上述方案,使所述清洗槽悬置在清洗槽内部空间中,增大手术植入物与清洗液的接触面积,提高清洗效果。
74.在具体实施过程中,所述浸泡槽21内可以设置有鼓泡装置,所述鼓泡装置能够通过喷出气体,加剧清洗液对手术植入物的冲刷效果,提高清洗效果。
75.所述气体优选为惰性气体。
76.如图4、7所示,在本发明一个优选的实施方式中,所述悬挂件23还设置有转轴232,所述转轴232与卡勾231相连接,当所述卡勾231与装载架1相配合时,所述转轴232旋转调节所述装载架1高度。
77.如图4、7所示,在具体实施过程中,所述卡勾231在同一侧相对设置有两个,两个所述转轴232转动方向相反,所述转轴232转动,所述卡勾231向上抬起。
78.采用上述方案,所述转轴232旋转能调节所述装载架1高度,进而调节清洗槽高度,根据清洗液液面高度调节清洗槽高度,当液面较低时可以根据实际情况降低清洗槽高度,节约清洗液。
79.如图4所示,在具体实施过程中,所述清洗槽还包括烘干槽22,所述烘干槽22设置有停靠沿221,当所述装载架1置于所述烘干槽22内时,所述装载架1上端与所述停靠沿221相配合。
80.在具体实施过程中,所述烘干槽22内可以设置有风干机,利用风力和温度烘干手术植入物。
81.采用上述方案,所述装载架1上端与所述停靠沿221相配合,使所述装载架1悬置与烘干槽22内,提高烘干效率。
82.如图5所示,在具体实施过程中,所述装载架1还设置有固定杆12和连接杆13,所述连接杆13同时与固定杆12和容纳槽11相连接,所述固定杆12能够与停靠沿221或卡勾231相配合。
83.如图2、7所示,在具体实施过程中,所述手术植入物全自动清洗装置还包括移动装置4,所述移动装置4包括横向移动结构和纵向移动结构,所述横向移动结构设置有横向移动杆41,所述纵向移动结构设置有纵向移动杆42,所述纵向移动杆42设置有第一滑块421,所述第一滑块421与横向移动杆41相配合使所述纵向移动杆42沿横向滑轨滑动。
84.在具体实施过程中,所述横向移动结构和纵向移动结构均设置有用于驱动的电动机。
85.采用上述方案,所述机械臂3与纵向移动杆42连接,纵向移动杆42能带动所述机械臂3移动。
86.如图2、9所示,在具体实施过程中,所述机械臂3设置有第二滑块32,所述纵向移动杆42设置有纵向滑杆422,所述第二滑块32与纵向滑杆422相配合使所述机械臂3沿纵向滑杆422上下滑动。
87.采用上述方案,便于提起或放下所述装载架1。
88.在具体实施过程中,所述第二滑块32与纵向滑杆422可以通过滑轮相配合。
89.如图5所示,在具体实施过程中,所述机械手31包括连接臂311和挂钩312,所述连
接臂311与挂钩312相连接,所述连接臂311与第二滑块32相连接,所述挂钩312用于与所述装载架1相配合,使机械臂3带动装载架1移动。
90.采用上述方案,使用挂钩312与转载架的固定杆12相配合,便于移动装载架1。
91.如图5所示,在本发明一个优选的实施方式中,所述固定杆12上设置有b型板121,所述b型板121与所述挂钩312相配合。
92.采用上述方案,放置挂钩312钩动位置变化,发生滑动。
93.如图3、8所示,在本发明一个优选的实施方式中,所述清洗柜2侧边设置有停靠架24,所述装载架1能够放置于停靠架24上。
94.采用上述方案,当需要进行清洗工作时,将所述装载架1能够放置于停靠架24上,将手术植入物固定于装载架1,再由机械臂3移动至各个槽。
95.如图1、6所示,在本发明一个优选的实施方式中,所述手术植入物全自动清洗装置还包括外壳体5,所述装载架1、清洗柜2及机械臂3均设置在所述外壳体5内。
96.采用上述方案,所述外壳体5能够容纳所述装载架1、清洗柜2及机械臂3,放置在进行清洗工作时外部环境影响清洗效果。
97.如图6、7、8所示,在本发明一个优选的实施方式中,所述清洗柜2两侧均设置有停靠架24,所述外壳体5两侧设置有投料口52和出料口51,所述投料口52和出料口51的设置位置与停靠架24相对应,手术植入物通过投料口52被放置在装载架1上,清洗后的手术植入物从出料口51被取出。
98.采用上述方案,工作人员只需将待清洗的手术植入物从投料口52放入,再从出料口51取出即可完成清洗,提高清洗便捷性。
99.如图7所示,在本发明一个优选的实施方式中,所述外壳体5还包括清洁仓56,所述出料口51设置于清洁仓56一侧,所述清洁仓56与所述清洗柜2相邻设置,所述清洁仓56与清洗柜2之间设置有隔断门57,所述隔断门57可以为电动的推拉式或者电动的翻转式,设置于出料口51侧的所述停靠架24由清洗柜2一侧延伸至清洁仓56内,所述停靠架24设置有传动履带,所述传动履带用于在清洁仓56和清洗柜2运送手术植入物。
100.在本发明一个优选的实施方式中,所述清洁仓56内部还设置有用于开启或关闭出料口51的出料门58,当所述出料门58和隔断门57都关闭时,所述清洁仓56处于密闭环境。
101.在具体实施过程中,手术植入物进入清洁仓56时,所述隔断门57打开,所述出料门58关闭;
102.待手术植入物进入清洁仓56后,所述隔断门57关闭,所述出料门58保持关闭;
103.若手术植入物需要移出清洁仓56时,所述隔断门57保持关闭,所述出料门58打开,手术植入物能够从出料口51被取出。
104.上述手术植入物在清洁仓56的运动过程均通过传动履带实现,机械手31将清洗后的手术植入物放置于传动履带上。
105.在具体实施过程中,手术植入物从进料口进入时,也可以通过传动履带实现。
106.所述清洁仓56设置有高效过滤器,所述高效过滤器内置有用于清洁清洁仓56内部空间的滤芯。
107.采用上述方案,在所述出料口51侧设置有清洁仓56,避免清洗后的手术植入物在出仓时发生污染,影响实际清洗效果。
108.所述手术植入物可以为骨钉、骨板等。
109.如图1所示,在具体实施过程中,所述外壳体5还设置有观察窗53,所述观察窗53的位置高于清洗柜2。
110.采用上述方案,便于观察清洗过程。
111.如图8、9所示,在本发明一个优选的实施方式中,所述外壳体5顶部设置有顶板54,所述顶板54下方设置有与顶板54相连接的辅助滑杆55,所述纵向移动杆42顶部设置有第三滑块4221,所述第三滑块4221与辅助滑杆55相配合。
112.采用上述方案,当所述纵向移动杆42横向移动时,与设置在不同位置的辅助滑杆55和横向滑杆均相配合,所述辅助滑杆55设置于所述纵向移动杆42顶部,防止纵向移动杆42发生纵向移动。
113.在具体实施过程中,所述浸泡槽21侧壁设置有通气孔,便于出所述溶剂槽内的腐蚀性气体
114.在具体实施过程中,所述清洗槽设置有传感器,所述传感器包括但不限于温度传感器、溶液浓度测试仪、电流传感器、电压传感器,用于对装置的参数进行监测。
115.在具体实施过程中,各个清洗槽均设置有所述温度传感器和溶液浓度测试仪,所述电流传感器和电压传感器设置与本装置的供电线路中,所述溶液浓度测试仪包括但不限于硫酸浓度传感器、乙醇浓度传感器或者碳酸钠浓度传感器等。
116.在具体实施过程中,所述手术植入物全自动清洗装置还设置有报警器,所述手术植入物全自动清洗装置对清洗槽均设置有温度阈值,当超过或低于温度阈值时,所述报警器报警;所述清洗槽还设置有溶液浓度阈值当槽内溶液超过或低于溶液浓度阈值时,所述报警器报警。
117.采用上述方案,防止机器发生异常运行,防止对手术植入物造成损害。
118.在具体实施过程中,所述报警器可以为蜂鸣器或者警报灯等。
119.在具体实施过程中,所述温度阈值可以为40
‑
45
°
;所述溶液浓度阈值可以通过测试ph值,即可以为ph值3
‑
5之间。
120.在具体实施过程中,还对运行时间进行记录,并最终将各参数汇总成表格进行输出,表格中的参数包括但不限于时间、温度、各溶液浓度、电流、电压等。
121.在具体实施过程中,所述手术植入物全自动清洗装置还设置有中控装置,所述中空装置内部设置有处理器,所述处理器内部设置有计算机程序,所述手术植入物全自动清洗装置按照程序,依照程序对应的清洗步骤,对手术植入物进行清洗。
122.在具体实施过程中,上述传感器以及电动机均与所述中控装置电连接。
123.在具体实施过程中,当设置不同的清洗步骤时,所述机械臂3按照顺序将放置在装载架1的手术植入物放置在不同的清洗槽中,每个槽的放置时间可以不同。
124.在具体实施过程中,本发明能够通过在装置中对电流、电压进行监控实现故障诊断,也可以通过设置液位传感器实时监控液位。
125.在具体实施过程中,所述清洗槽可以在槽口设置槽盖防止液体流出。
126.本发明整体采用不锈钢材质,耐腐蚀。
127.本发明能够通过电导率对水质进行监控。
128.本发明还设置有用于为各个清洗槽提供清洗液的管路,通过阀门控制,自动供给
清洗液。
129.在具体实施过程中,所述外壳体还设置有后开门,所述后开门可以为合页开闭的方式进行开闭,将所述后开门打开,可以对内部的清洗槽进行维修后者清洁。
130.工作原理:将装载架1预先放置于停靠架24,并将待处理的手术植入物从投料口52放置在装载架1上,所述机械臂3移动装载架1到不同的清洗槽,所述移动装置4能够带动机械臂3及装载架1移动,将清洗后的手术植入物放置在另一端的停靠架24上,完成清洗步骤,并从出料口51取出。
131.应当理解,本技术实施例中,从权、各个实施例、特征可以互相组合结合,都能实现解决前述技术问题。
132.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。