1.本发明涉及道路管制工具领域,特别涉及一种远程智能管控系统的升降路障。
背景技术:
2.路障,即道路上设置的障碍物,起到影响交通的作用,路障又分为固定路障和活动路障(即可升降路障);固定路障一旦设置就无法移动,存在较大的弊端,而升降路障由于其可升起可降下的灵活性,被越来越广发的应用。
3.地铁早晚高峰期,人流较多,通过摆放铁马进行分流人群,铁马笨重,收起或摆放已经比较麻烦,对于改变人流走动方向更加的不便。
技术实现要素:
4.为克服目前的地铁早晚高峰期人流较多,通过笨重的铁马进行分流不方便的技术问题,本发明提供了一种远程智能管控系统的升降路障,其包括内筒,包括伸展臂与内筒筒身,所述伸展臂与所述内筒筒身转动连接;外筒,所述外筒埋设于地面,外筒套接在内筒上,包括转动盘、电机、驱动齿轮,所述电机与所述驱动齿轮固定连接,所述驱动齿轮与所述转动盘啮合;驱动杆,所述驱动杆一端与所述转动盘连接,另一端连接所述内筒;其中,所述驱动杆驱动所述内筒升降,所述转动盘在所述电机的驱动下转动,以带动所述内筒转动。
5.优选地,所述伸展臂数量为三个,相邻的所述伸展臂展开后相互垂直,相对的所述伸展臂相互平行。
6.优选地,所述伸展臂可向所述内筒远离所述外筒的方向进行转动收纳,所述转动盘转动角度为90
°
、180
°
、270
°
、360
°
。
7.优选地,所述伸展臂的远离内筒筒身的位置设置电磁件与挂环。
8.优选地,所述外筒包括固定件与卡持件,所述卡持件与所述固定件连接;所述卡持件可从所述固定件伸出或缩回所述固定件内。
9.优选地,所述内筒包括四凹槽,相邻的所述凹槽之间的内筒的弧度为90
°
;所述卡持件可抵持在凹槽内。
10.优选地,所述转动盘上设置接触开关。
11.优选地,进一步包括控制系统,所述控制系统设置于所述外筒内。
12.优选地,所述控制系统包括无线连接模块,用于向外部发送信号或接收外部信号指令;驱动模块,所述驱动模块与所述驱动杆电性连接;转动模块,所述转动模块与所述电机电性连接;处理模块,所述处理模块与所述无线连接模块、所述驱动模块、所述处理模块电性连接,所述接触开关、所述电磁件与处理模块电性连接。
13.优选地,所述驱动杆为液压杆。
14.与现有技术相比,本发明提供的一种远程智能管控系统的升降路障,具有以下优点:
15.1、外筒套接在内筒上,内筒在驱动杆的驱动下升降,内筒上设置伸展臂,伸展臂向
远离内筒伸出,通过在地铁上设置升降路障,伸展臂的阻拦下,可形成一带导向性的通道,使人群按照通道通过,电机可驱动内筒进行转动,使伸展臂被带动进行转动,通过转动伸展臂可改变通道的方向,使人群按照伸展臂形成的通道的走向进行走动,提高改变人流方向的便捷性,增加人流管控的便捷性,当人流高峰期过去后,驱动驱动杆降下内筒,提高对场地的利用率。
16.2、伸展臂可向内筒远离外筒的方向转动,伸展臂从与内筒平行的位置转动至与内筒垂直的位置上,以向内筒两端的展开,转动盘转动角度为90
°
、180
°
、270
°
、360
°
,使伸展臂改变朝向的位置,可将伸展臂导向的通道改变阻拦,或者将通道改变方向,提高对场景的适应性,以及提高使用的便捷性。
17.3、伸展臂的端头设置电磁件,电磁件在升起时通电生磁,以磁吸伸展臂,电磁件可使相邻的伸展臂磁吸,使相邻的伸展臂连接在一起,以成为一通道,另外,电磁件可将伸展臂磁吸到内筒筒身上,避免伸展臂阻碍人流通过通道,挂环可用于挂持阻拦物,地铁秩序管理员可通过阻拦物短暂地停止人流前进,便于人工的干预,提高升降路障的适用性。
18.4、可持件在内筒停止转动后,抵持在内筒上的凹槽,可避免内筒转动幅度过大,当内筒未有抵持在内筒的凹槽上,根据卡持件的伸缩情况,通过电信号传递到控制台上,以便于对升降路障进行维护。同时,可以固定内筒,避免人流增多对内筒的挤压增加对驱动杆的作用,防止驱动杆的受损,可将内筒受到的作用力通过卡持件传导至地面上,提高对升降路障的保护,延长升降路障的使用寿命。
19.5、转动盘设置接触开关,可检测转动盘的转动幅度,以检测转动盘转动的情况,可实时监测到转动盘的运行情况,避免内筒无法使用,可及时发现转动盘的运行问题,以便于及时进行维修。
20.6、控制系统可便于控制台远程控制升降路障,无线连接模块可通过无线传递信号,以让升降路障执行对应信号的指令,转动模块可让电机改变转动方向,以转动转动盘对应的角度,驱动模块可驱动驱动杆的伸缩,以控制升降路障的升降,使用户可通过远程控制升降路障各个部件进行对应的操作,通过无线传递信号指令,控制伸展臂转动,令伸展臂展开的方向得以改变,进而改变伸展臂所形成的通道,以将人流导向按照通道的走向进行改变,通过远程控制,可提高操作的效率,可减少地铁管理员现场进行操作,增加升降路障的使用便捷性与实用性。
21.7、伸展臂设置三个,相邻的两个伸展臂展开后相互垂直,相对的伸展臂相互平行,垂直的伸展臂可确保升降路障组成的道路可组成弯道,使人流可呈类s字形地排列,以适用当前的场地,提高场地的使用率。
22.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的原则之内所作的任何修改,等同替换和改进等均应包含本发明的保护范围之内。
附图说明
23.图1是本发明第一实施例提供的一种远程智能管控系统的升降路障的侧视剖视图一;
24.图2是本发明第一实施例提供的一种远程智能管控系统的升降路障的侧视剖视图二;
25.图3是本发明第一实施例提供的一种远程智能管控系统的升降路障的使用状态图一;
26.图4是本发明第一实施例提供的一种远程智能管控系统的升降路障的使用状态图二。
27.附图标记说明:
28.1、远程智能管控系统的升降路障;11、内筒;12、外筒;13、驱动杆;14、控制系统;111、伸展臂;112、内筒筒身;113、凹槽;1111、电磁件;1112、挂环;121、转动盘;122、电机;123、驱动齿轮;124、固定件;125、卡持件;1211、接触开关;141、无线连接模块;142、驱动模块;143、转动模块;144、处理模块;
具体实施方式
29.为了使本发明的目的,技术方案及优点更加清楚明白,以下结合附图及实施实例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
30.需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
31.路障,即道路上设置的障碍物,起到影响交通的作用,路障又分为固定路障和活动路障(即可升降路障);固定路障一旦设置就无法移动,存在较大的弊端,而升降路障由于其可升起可降下的灵活性,被越来越广发的应用。
32.发明人发现现有技术中存在以下问题:地铁早晚高峰期,人流较多,通过摆放铁马进行分流人群,铁马笨重,收起或摆放已经比较麻烦,对于改变人流走动方向更加的不便。
33.请参阅图1
‑
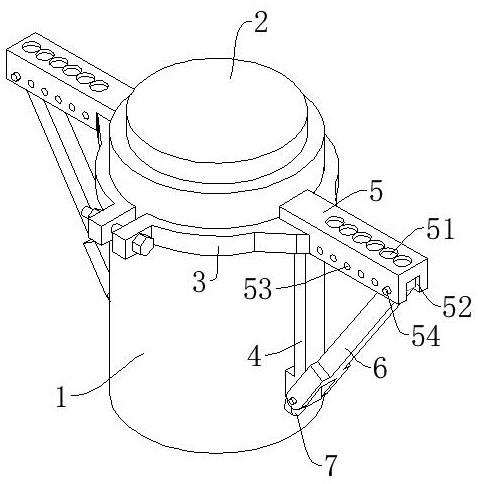
4,本发明第一实施例提供了一种远程智能管控系统的升降路障1,用于疏散地铁早晚高峰的人流。包括内筒11、外筒12及驱动杆13,外筒12埋设于地面,外筒12套接在内筒11上,驱动杆13一端与外筒12连接,另一端连接内筒11。
34.具体地,驱动杆13为液压杆,内筒11可通过驱动杆13的驱动下,从外筒12内升起,或缩回外筒12内,以达到远程智能管控系统的升降路障1自动地升降。
35.内筒11包括伸展臂111与内筒11筒身,伸展臂111与内筒11筒身转动连接。外筒12包括转动盘121、电机122、驱动齿轮123,电机122与驱动齿轮123固定连接,驱动齿轮123与转动盘121啮合。
36.外筒12套接在内筒11上,内筒11在驱动杆13的驱动下升降,内筒11上设置伸展臂111,伸展臂111向远离内筒11伸出,通过在地铁上设置远程智能管控系统的升降路障1,伸展臂111的阻拦下,可形成一带导向性的通道,使人群按照通道通过,电机122可驱动内筒11进行转动,使伸展臂111被带动进行转动,通过转动伸展臂111可改变通道的方向,使人群按照伸展臂111形成的通道的走向进行走动,提高改变人流方向的便捷性,增加人流管控的便捷性,当人流高峰期过去后,驱动驱动杆13降下内筒11,提高对场地的利用率。
37.所述伸展臂111数量为三个,相邻的所述伸展臂111展开后相互垂直,相对的所述伸展臂111相互平行。
38.为了让伸展臂111可实现通道的转弯,可通过转动内筒11,使相邻的伸展臂111位于对应通道的直角位置上,让通道组成直角的拐弯,让通道弯曲,呈类s字形走向,使通道占用更少的位置,提高对场景的利用率。
39.伸展臂111可向内筒11远离外筒12的方向进行转动,转动盘121转动角度为90
°
、180
°
、270
°
、360
°
。
40.具体地,伸展臂111可向内筒11远离外筒12的方向转动,伸展臂111从与内筒11平行的位置转动至与内筒11垂直的位置上,以向内筒11两端的展开,转动盘121转动角度为90
°
、180
°
、270
°
、360
°
,使伸展臂111改变朝向的位置,可将伸展臂111导向的通道改变阻拦,或者将通道改变方向,提高对场景的适应性,以及提高使用的便捷性。
41.可以理解,伸展臂111可通过转动,靠近内筒11筒身以便于收纳,伸展臂111可向远离外筒12的方向进行翻转,使伸展臂111可在内筒11下降时,可被地面所推动转向内筒11筒身,可避免伸展臂111被地面阻挡所折断,可对伸展臂111进行保护,防止伸展臂111被损坏。此外,伸展臂111设置为相邻的伸展臂111展开后相互垂直,转动盘121转动的角度为90
°
的倍数,使伸展臂111可对应伸展臂111的设置进行转动,使远程智能管控系统的升降路障1之间的伸展臂111可组成直角的通道,以便于人流呈s字形地前进,提高对场地的利用率。
42.伸展臂111的端头设置电磁件1111与挂环。
43.伸展臂111的端头设置电磁件1111,电磁件1111在升起时通电生磁,以磁吸伸展臂111,电磁件1111可使相邻的伸展臂111磁吸,使相邻的伸展臂111连接在一起,以成为一通道,另外,电磁件1111可将伸展臂111磁吸到内筒11筒身上,避免伸展臂111阻碍人流通过通道,挂环可用于挂持阻拦物,地铁秩序管理员可通过阻拦物短暂地停止人流前进,以达到对人流进行截止的作用,便于人工的干预,提高远程智能管控系统的升降路障1的适用性。
44.所述外筒12包括固定件124与卡持件125,所述卡持件125与所述固定件124连接。所述内筒11包括四凹槽113,相邻的所述凹槽113之间的内筒11的弧度为90
°
。
45.具体地,固定件124设置有法兰盘与螺纹固定结构,螺纹固定结构穿透法兰盘与地面,将外筒12固定在地面上,提高外筒12的稳定性,进而提高远程智能管控系统的升降路障1的稳定性,进一步地,可通过松动螺纹固定结构,以令远程智能管控系统的升降路障1从地面上抽出,避免对远程智能管控系统的升降路障1进行维修,以及可直接进行对当前位置的远程智能管控系统的升降路障1进行更换,避免影响对人流的导流,提高实用性。所述卡持件125可从所述固定件124伸出或缩回所述固定件124内。所述卡持件125可抵持在凹槽113内。可持件在内筒11停止转动后,抵持在内筒11上的凹槽113,可避免内筒11转动幅度过大,当内筒11未有抵持在内筒11的凹槽113上,根据卡持件125的伸缩情况,通过电信号传递到控制台上,以便于对远程智能管控系统的升降路障1进行维护。同时,可以固定内筒11,避免人流增多对内筒11的挤压增加对驱动杆13的作用,防止驱动杆13的受损,可将内筒11受到的作用力通过卡持件125传导至地面上,提高对远程智能管控系统的升降路障1的保护,延长远程智能管控系统的升降路障1的使用寿命。
46.特别地,相邻的所述凹槽113之间的内筒11的弧度为90
°
,也即,凹槽113对应伸展臂111的设置的位置,伸展臂111对应内筒11开口位置上设置有凹槽113,通过卡持件125抵持在凹槽113上,可确定伸展臂111是否处于通道的边缘位置上。
47.转动盘121上设置接触开关1211。具体地,转动盘121设置接触开关1211,可检测转
动盘121的转动幅度,以检测转动盘121转动的情况,可实时监测到转动盘121的运行情况,避免内筒11无法使用,可及时发现转动盘121的运行问题,以便于及时进行维修。
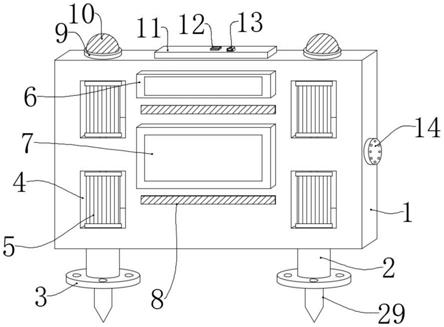
48.远程智能管控系统的远程智能管控系统的升降路障11进一步包括控制系统14,控制系统14设置于外筒12内。
49.控制系统14包括无线连接模块141、驱动模块142、转动模块143及处理模块144,无线连接模块141用于向外部发送信号或接收外部信号指令;驱动模块142与驱动杆13电性连接;转动模块143与电机122电性连接;处理模块144与无线连接模块141、驱动模块142、处理模块144电性连接,接触开关1211、电磁件1111与处理模块144电性连接。
50.具体地,控制系统14可便于控制台远程控制远程智能管控系统的升降路障1,无线连接模块141可通过无线传递信号,以让远程智能管控系统的升降路障1执行对应信号的指令,转动模块143可让电机122改变转动方向,以转动转动盘121对应的角度,驱动模块142可驱动驱动杆13的伸缩,以控制远程智能管控系统的升降路障1的升降,使用户可通过远程控制远程智能管控系统的升降路障1各个部件进行对应的操作,通过无线传递信号指令,控制伸展臂111转动,令伸展臂111展开的方向得以改变,进而改变伸展臂111所形成的通道,以将人流导向按照通道的走向进行改变,通过远程控制,可提高操作的效率,可减少地铁管理员现场进行操作,增加远程智能管控系统的升降路障1的使用便捷性与实用性。
51.可以理解,任两个远程智能管控系统的升降路障1之间的距离小于或等于两伸展臂111的长度之和,使伸展臂111可拦截住远程智能管控系统的升降路障1之间的间距,伸展臂111与内筒11筒身上的连接处设置电转轴,控制系统14可通过电信号控制伸展臂111的落下与收起,从而控制系统14可根据当前的需要进行调整伸展臂111拦截的方向,进而改变通道的走向,使控制系统14可改变场景中的有远程智能管控系统的升降路障1组成的通道的走向,以适应当前的人流数量,容纳最多的人数。
52.工作原理:
53.技术问题:地铁早晚高峰期,人流较多,通过摆放铁马进行分流人群,铁马笨重,收起或摆放已经比较麻烦,对于改变人流走动方向更加的不便。
54.外筒12套接在内筒11上,驱动杆13一端连接内筒11,另一端连接外筒12的内部,驱动杆13可驱动内筒11升降,以达到自动升降的功能。
55.外筒12内设置转动盘121、电机122、驱动齿轮123,电机122带动驱动齿轮123转动,从而带动转动盘121转动,进而将驱动件与内筒11转动。内筒11上设置有三伸展臂111,相邻的所述伸展臂111展开后相互垂直,相对的所述伸展臂111相互平行。相邻的伸展臂111通过末端的电磁件1111磁吸连接在一起,以组成一通道,便于人群按照通道的走向进行走动。通过转动转盘,使内筒11被带动转动,从而将伸展臂111转动,以此改变远程智能管控系统的升降路障1组成的通道,从而改变人群的走动方向。
56.外筒12上设置固定件124与卡持件125,固定件124用于外筒12的固定,通过固定件124上的螺纹固定结构可将外筒12固定于地面上,卡持件125可从固定件124向内筒11的方向伸出,或缩回固定件124,内筒11上设置有凹槽113,卡持件125抵持在凹槽113上,进而将转动的内筒11固定,避免内筒11转动过度。同时,凹槽113对应伸展臂111的位置,卡持件125对凹槽113抵持,使伸展臂111的方向被固定,同时,可以固定内筒11,避免人流增多对内筒11的挤压增加对驱动杆13的作用,防止驱动杆13的受损,可将内筒11受到的作用力通过卡
持件125传导至地面上,提高对远程智能管控系统的升降路障1的保护,延长远程智能管控系统的升降路障1的使用寿命。
57.转动盘121上设置接触开关1211,通过接触开关1211监测转动盘121的转动幅度,检测转动盘121转动的情况,检测转动盘121的实时运行情况,避免内筒11无法使用,及时发现转动盘121的运行问题,便于对其进行及时的维修。
58.控制系统14便于控制台远程控制远程智能管控系统的升降路障1,当人群开始出现高峰期,通过无线连接模块141发送或接收无线信号,处理模块144处理无线连接模块141接收的信号指令,控制远程智能管控系统的升降路障1的升起,以及改变远程智能管控系统的升降路障1的伸展臂111的伸展位置,将远程智能管控系统的升降路障1组成一通道,便于人群的通过,同时,将人群按照占用最少位置的排列方法进行排列通道,将场地有效地利用,提高对场地的利用,同时,减少管理员的现场操作,提高远程智能管控系统的升降路障1的使用便捷性与实用性。
59.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的原则之内所作的任何修改,等同替换和改进等均应包含本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。