1.本发明涉及一种用于控制时变负载的电负载电流的有效值的控制器设备、一种包括控制器设备的车辆以及一种用于操作这种控制器设备的方法。
背景技术:
2.电磁阀用于管理车辆液压助力转向中的液压流量。电磁阀的位置在此取决于流过电磁阀的电负载电流的有效值。负载电流是通过施加于电磁阀的电压脉冲序列产生的。通过对电压脉冲序列的脉冲宽度调制来调整负载电流的定义的设定点有效值。电负载电流的有效值取决于电压脉冲序列的占空比(英文:duty cycle)。为了将有效值控制为负载电流的预定的设定点有效值,需要获取负载电流的实际有效值并且将其与设定点有效值进行比较。
3.获取电负载电流的实际有效值存在的问题是电磁阀是电感性负载、并且因此是时变负载。因此,负载电流的曲线是复杂的曲线,特别是时间常数tau(τ)的指数曲线,该时间常数定义了直到负载电流的电流幅值/电流强度减半(半衰期)或倍增、或减小到原来的1/e(e=欧拉常数)、或增大到原来的(1
‑
1/e)倍的时间长度。因此需要通过测量来确定有效值。这可以通过使用积分器的模拟电路系统对电流曲线求和然后求平均来实现。对此的替代方案涉及对负载电流曲线进行高频采样。在这种情况下,控制单元中的程序执行求和以及随后的求平均。控制单元需要足够的处理器能力,以便在所需的时间内分析样本值。在这两种情况下都需要测量分流器以用于确保指定的准确度。
4.所描述的用于确定负载电流的实际有效值的方法的缺点在于,控制器设备包括大量用于获取负载电流的实际有效值的电子部件。这导致制造工作量和成本增加。
技术实现要素:
5.因此,本发明的目的是减少为确定时变负载的电负载电流的实际有效值所需的部件数量。
6.本发明提供了一种用于控制时变负载的电负载电流的有效值的控制器设备。该控制器设备被设计为在该时变负载上提供具有预定占空比的电压脉冲序列。该控制器设备被设计为在该电压脉冲序列的至少一个脉冲相位中获取该时变负载的电负载电流的样本值。换言之,该控制器设备旨在:在该电压脉冲序列的至少一个脉冲相位期间,在预定采样时间获取该样本值,该样本值是该电负载电流在该采样时间的瞬时电流幅值。该预定采样时间可以取决于该电压脉冲序列的相位角。该控制器设备被设计为借助于存储在该控制器设备中的依赖关系来确定被分配给该电负载电流的样本值的电负载电流的实际有效值。换言之,在该控制器设备中提供了使得可以针对所获取的电负载电流的样本值确定电负载电流的对应实际有效值的依赖关系。例如,该依赖关系可以是特征值表或计算规则(数学函数),这些特征值表或计算规则都可以存储在该控制器设备中。该控制器设备被设计为确定在该
电负载电流的实际有效值与该电负载电流的预定设定点有效值之间的差值。换言之,该控制器设备被设计为将所确定的电负载电流的实际有效值与该电负载电流的设定点有效值进行比较,以便确定该差值。该控制器设备被设计为根据预定方法(控制方法)由该电负载电流的差值确定该电压脉冲序列的适配占空比,并且在该时变负载上提供具有该适配占空比的修改的或适配的电压脉冲序列。换言之,该控制器设备被设计为根据所确定的电负载电流的差值来修改该电压脉冲序列的占空比,并提供具有该适配占空比的适配电压脉冲序列,以便减小该差值。因此,在生成该电压脉冲序列期间,该电压脉冲序列在一个脉冲相位或多个脉冲相位中的占空比可以根据在该脉冲相位中确定的实际有效值来修改。因此,占空比可以是受控变量。例如,所述控制方法可以基于pid控制(pid——比例、积分、微分)或pi控制。
7.本发明的优点在于,该控制器设备可以从样本值确定电负载电流的实际有效值。因此,本发明的优点在于不需要对电流曲线进行积分来确定电负载电流的实际有效值。由此可以在无需积分器或控制单元的情况下确定电负载电流的实际有效值,从而可以减少所需的部件数量。
8.本发明的发展规定,该依赖关系包括特征值表。换言之,该依赖关系包括表,在该表中,离散样本值各自被分配有负载电流的对应实际有效值。这具有不需要控制器设备进行计算操作来确定实际有效值的优点。例如可以规定,特征值表是转换表,从该表中可以针对所获取的各个样本值检索对应的实际有效值。所述类型的转换表也称为查找表。
9.本发明的发展规定,该依赖关系包括表征函数。换言之,该依赖关系包括数学函数,该数学函数使得可以针对特定样本值计算电负载电流的对应实际有效值。这样的优点在于可以针对样本值的连续范围确定实际有效值。例如可以规定,表征函数是模型函数,其已经近似于描述特定样本值与电负载电流的对应实际有效值之间的关系的测量点。
10.本发明的发展规定,该控制器设备被设计为提供周期为1.5ms至3.5ms的电压脉冲序列。换言之,该控制器设备被设计为生成周期为1.5ms至3.5ms的电压脉冲序列。这样的优点在于该控制器设备可以提供寻常的周期。例如,周期可以为2.5ms。
11.原则上,可以对每个周期执行控制,即以所描述的方式适配占空比。在这种情况下,电压脉冲序列的脉冲持续时间优选地应该小于时变负载的tau的5倍(tau=时变负载的时间常数)。本发明的发展相应地规定,该控制器设备被设计为:将脉冲持续时间设定为小于该时变负载的tau的5倍,其中,tau是所述时变负载的时间常数;并且在该电压脉冲序列的多个或所有脉冲相位中根据在对应脉冲相位中获得的样本值来确定该占空比。换言之,可以在该电压脉冲序列的一些或所有脉冲相位中执行所描述的用于适配或修改占空比的步骤。这样的优点在于可以随时间对变化做出反应。
12.本发明的发展规定,该控制器设备被设计为以方波信号的形式提供该电压脉冲序列。换言之,该控制器设备被设计为生成方波信号作为电压脉冲序列,其中,该电压脉冲序列的电压在两个电压电平之间变化。这两个电压电平是高电压电平和低电压电平。包含高电压值的区域可以构成电压脉冲序列的脉冲,并且可以具有脉冲持续时间。该发展的优点在于可以使用简单的开关来生成电压脉冲序列。
13.本发明的发展规定,该控制器设备被设计以获取周期获取该电负载电流的样本值,该获取周期是该电压脉冲序列的周期的整数倍。换言之,该控制器设备被设计为以规则
的时间间隔获取电负载电流的样本值,其中,样本值的获取之间的获取周期为电压脉冲序列的周期的整数倍。这样的优点在于,在电压脉冲序列的相同相位中获取样本值。
14.本发明的发展规定,依赖关系特定于相应的时变负载和相应的控制器设备。换言之,特定控制器设备针对施加于该控制器设备的特定时变负载进行校准,使得依赖关系描述了:对于特定的控制器设备与特定的时变负载的特定组合,样本值与实际有效值之间的关系。这样的优点在于可以补偿发生在控制器设备上和时变负载中的生产系列波动。例如,在样本值获取时在各个控制器设备之间可能存在与生产系列相关的波动。时变负载可能具有生产系列波动,这些生产系列波动会导致不同电磁阀之间的各种负载电流时间变化曲线存在差异。例如,这可以归因于各个电磁阀的电感差异。通过确定特定的控制器设备和负载对的依赖关系来校正这些波动。
15.本发明的发展规定,该控制器设备被设计为在该脉冲相位的最后十分之一中获取该电负载电流的样本值。换言之,采样时间位于每个脉冲相位的最后十分之一处。这样的优点在于,在负载电流的上升小于脉冲相位开始时的上升时获取样本值。
16.本发明的发展规定,该控制器设备被设计为在该电压脉冲序列的脉冲的下降信号沿期间获取该电负载电流的样本值。换言之,样本值的采样时间位于下降相位,在该下降相位中,电压值从高电压值下降到低电压值。这样的优点在于可以由信号沿触发获取样本值的时间。
17.本发明的发展规定,该控制器设备包括功率mosfet。换言之,该控制器设备包括金属氧化物半导体场效应晶体管,该晶体管被设计用于电流和电压的受控导通和阻断。该晶体管可以是所谓的智能fet,其包括控制单元和脉冲宽度控制器(pwm控制器),以用于通过占空比来控制负载电流的有效值。
18.本发明还包括一种车辆,该车辆包括用于控制时变负载的电负载电流的有效值的控制器设备。特别地,该车辆可以是机动车辆,比如重型货车或汽车。该控制器设备可以被设计为例如控制作为时变负载的电磁阀中的电负载电流的有效值。
19.本发明还包括一种用于控制时变负载的电负载电流的有效值的方法。在该方法中规定,该控制器设备在时变负载上连续提供多个校准电压脉冲序列,其中,每个校准电压脉冲序列都具有特定的占空比。换言之,生成多个校准电压脉冲序列用于校准,其中,各个校准电压脉冲序列的占空比彼此不同。该控制器设备在各个校准电压脉冲序列的至少一个脉冲相位中获取该时变负载的电负载电流的样本值。换言之,针对每个校准电压脉冲序列获取相应样本值。传感器单元在各个校准电压脉冲序列的至少一个周期内获取该时变负载的电负载电流的实际有效值。换言之,在校准期间,该传感器单元针对每个校准电压脉冲序列获取电负载电流的相关实际有效值。该传感器单元可以被设计为例如获取负载电流的曲线并对该曲线进行积分,并且由此确定该实际有效值。例如,该传感器单元可以是万用表,其可以连接到时变负载和控制器设备以用于校准。校准后,该传感器单元可以与控制器设备和时变负载断开连接。在各个校准电压脉冲序列的至少一个周期内确定该电负载电流的实际有效值。将该电负载电流的实际有效值(该值由该传感器单元获取)传送到该控制器设备。该控制器设备生成并存储依赖关系,其中,该电负载电流的各个样本值和这些校准电压脉冲序列的各个占空比被分配该电负载电流的对应实际有效值。换言之,该控制器设备生成依赖关系,该依赖关系中存储了针对每个样本值和占空比的对应实际有效值。例如,这可
以由该控制器设备的控制单元执行。所述依赖关系可以存储在该控制单元中。这允许该控制器设备通过针对特定样本值和特定占空比的依赖关系来确定电负载电流的实际有效值。
20.在下一步骤中,该控制器设备在该时变负载上提供具有预定占空比的电压脉冲序列。该控制器设备在该电压脉冲序列的至少一个脉冲相位中获取该时变负载的电负载电流的样本值。该控制器设备借助于存储在该控制器设备中的依赖关系来确定该电负载电流的实际有效值,该值被分配给该电负载电流的样本值和该电压脉冲序列的占空比。换言之,该控制器设备使用依赖关系来确定电负载电流的实际有效值。在随后的步骤中,该控制器设备确定该电负载电流的实际有效值与该电负载电流的设定点有效值之间的差值。根据预定方法(控制方法)由该差值确定该电压脉冲序列的适配占空比。该适配占空比用于提供适配电压脉冲序列,以便减小电负载电流的差值。
21.本发明还包括对根据本发明的方法的发展,这些发展具有已经结合根据本发明的控制器设备的发展而描述的特征。由此,在此不再次描述对根据本发明的方法的对应进一步发展。
22.本发明还包括所描述的实施例的特征的组合。
附图说明
23.下文描述了本发明的示例性实施例。在这方面:
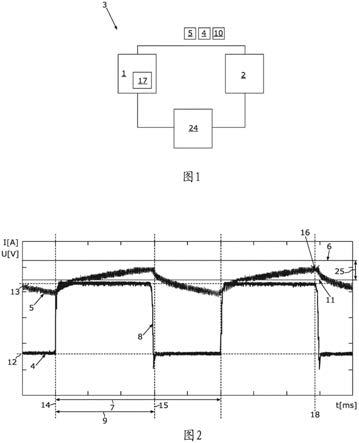
24.图1示出了控制器设备1;
25.图2示出了负载电流i的曲线;
26.图3示出了负载电流i的另一曲线;
27.图4示出了与对应占空比x相关的电流曲线i;
28.图5示出了依赖关系4;以及
29.图6示出了方法的可能顺序。
30.下文说明的示例性实施例是本发明的优选实施例。在示例性实施例中,该实施例的所描述部件各自表示本发明的单独特征,这些单独特征应当被彼此独立地考虑并且各自还彼此独立地发展本发明并且因此还可以单独地或以除所示组合之外的组合被认为是本发明的一部分。此外,所描述的实施例还可以由已经描述的本发明的另外特征进行补充。
31.在附图中,具有相同功能的元件各自设有相同的附图标记。
具体实施方式
32.图1示出了控制器设备1,该控制器设备以导电方式连接到时变负载2。例如,控制器设备1可以包括智能fet。时变负载2可以是用于控制车辆3的助力转向中的液压流量的电磁阀。控制器设备1可以被设计为提供电压脉冲序列4,以便在时变负载2上提供具有预定设定点有效值6的电负载电流5。电压脉冲序列4可以被设计为例如方波函数,并且可以具有周期7。电压脉冲序列4可以包括具有脉冲持续时间9的脉冲8。脉冲持续时间9与周期7之比可以由占空比10描述。时变负载2例如可以是电磁阀,其中,电磁阀的打开程度可以取决于流过时变负载2的电负载电流的实际有效值11。时变负载2可以包括电感,因此负载电流5可以以指数方式上升或以指数方式下降。通过控制器设备1调整占空比10,可以将电负载电流的实际有效值11调整为电负载电流5的设定点有效值。
33.控制器设备1可以用于车辆3中的助力转向。所需的发动机功率在此可以取决于助力转向的干预程度。助力转向的干预程度可以通过电磁阀来调整。电磁阀可以是由控制器设备1致动和/或控制的比例阀。在这个过程中,电磁阀可以表现如下:当通过阀的电负载电流5较高时,阀可以关闭。这可以最小化助力转向的液压回路中的液压流量。对于该位置,助力转向的程度最小。当通过电磁阀的电负载电流5较小时,电磁阀可以打开,并且助力转向的液压回路中的液压流量最大。对于该位置,助力转向的程度可以最大。
34.电磁阀的位置取决于电负载电流的实际有效值11。有效值为电负载电流5的均方根值。电负载电流的实际有效值11与电磁阀的打开程度成反比。使用经脉冲宽度调制的电压脉冲序列4来致动电磁阀。这意味着电负载电流的实际有效值11是通过电压脉冲序列4的脉冲宽度来控制的。用于确定实际有效值11的传感器单元24可以在控制器设备1的校准期间以导电方式连接到控制器设备1和时变负载2。传感器单元24可以在校准之后被移除。
35.图2示出了负载电流5的曲线。电压脉冲序列4(其可以是方波函数)可以由控制器设备1施加于时变负载2。电压脉冲序列4可以具有两个电压电平12和13,其中,电压u的值可以在脉冲8期间具有高电压电平13,而在脉冲8之外具有低电压电平12。脉冲8可以具有脉冲持续时间9,并且电压脉冲序列4可以具有周期7。脉冲持续时间9可以由上升沿的时间14和下降沿的时间15来界定。从上升沿的时间14开始,负载电流5的值可以上升。从下降沿的时间15开始,流过时变负载2的负载电流5可以以指数方式下降。流过时变负载2的电负载电流的实际有效值11可以通过定义占空比10、以及因此在周期7与脉冲持续时间9之比来定义。为了能够确定电负载电流的实际有效值11的确切值,在现有技术中需要通过模拟电路或软件对负载电流5的曲线进行积分。这两种方法的缺点是工作量大,并且必须提供额外的部件。在所提出的方法中,为了确定电负载电流的实际有效值11,可以规定,并非对负载电流5进行积分,而是在电压脉冲序列4的至少一个脉冲8期间获取电负载电流的样本值16。例如,可以规定控制器设备1在脉冲8的相位的最后十分之一中获取电负载电流的样本值16。控制器设备1可以通过以下方式来确定电负载电流的实际有效值11,即,控制器设备1检索针对特定样本值16、存储在依赖关系17中的电负载电流的实际有效值11。依赖关系17可以是例如可以存储在控制器设备1中的函数或特征值表。样本值16的采样时间18可以位于脉冲8的相位的最后十分之一。
36.图3示出了负载电流5的另一可能曲线。该图示出了另一电压脉冲序列4,其中低电压电平12和高电压电平13可以与图2中的低电压电平和高电压电平相同。图3中所示的电压脉冲序列4可以具有比图2中的电压脉冲序列4更小的占空比10。例如,脉冲持续时间9可以更短,这意味着电负载电流的实际有效值11可以具有比图2中的电负载电流的实际有效值11更小的值。样本值16的采样时间18可以发生在与图2中相同的相位角。由于更短的脉冲持续时间9,图3中的样本值16可以具有比图2中的样本值16更小的值。
37.图4示出了与对应占空比10相关的电负载电流5的曲线。所描绘的电负载电流5的曲线可以由各个校准电压脉冲序列19、20、21、22、23产生,这些校准电压脉冲序列可以具有相同的低电压电平12和相同的高电压电平13,并且这些校准电压脉冲序列的占空比10可以彼此不同。例如,相关联校准电压脉冲序列19、20、21、22、23的占空比10可以等于12%、24%、36%、48%和60%。负载电流5的每条曲线的样本值16是在脉冲相位8的最后十分之一中获取的。可以看出,负载电流5的曲线和电负载电流的样本值16的值都与选定的占空比10
相关的上升。因此总体上获得了样本值16与电负载电流的实际有效值11之间的关系。该关系用于生成存储在控制器设备1中的依赖关系17。为了产生依赖关系17,可以在时变负载2上连续提供校准电压脉冲序列19、20、21、22、23。控制器设备1可以针对校准电压脉冲序列19、20、21、22、23中的每一个获取相关样本值16。电负载电流的实际有效值11由传感器单元24确定。电负载电流的实际有效值11可以由传感器单元24传送到控制器设备1,在该控制器设备处该实际有效值可以被分配给依赖关系17中的对应所获取的样本值16。例如可以规定,控制器设备1创建表征函数作为依赖关系17,该表征函数可以用于针对所获取的电负载电流的样本值16计算电负载电流的相关联的实际有效值11。可替代地,可以规定,依赖关系17是特征值表,其中存储了电负载电流的相应实际有效值11以及相关联的对应样本值16。
38.图5示出了依赖关系17。例如,依赖关系17可以是特征值表。示出了特征值表的示例,其中将电负载电流的对应实际有效值11分配给各个样本值16。
39.图6示出了方法的可能顺序。该方法可以例如由控制设备或控制器设备1执行,以便提供时变负载2的电负载电流的设定点有效值6。在第一步骤s1中,控制器设备1可以提供具有预定占空比10的电压脉冲序列4,由此电负载电流可以流过时变负载2和控制器设备1。控制器设备1可以在预定采样时间18获取负载电流的样本值16。
40.在步骤s2中,控制器设备1可以确定电负载电流的实际有效值11,其中这可以例如通过呈表征函数或特征值表形式的依赖关系17来实现。在这个过程中,控制器设备1可以针对样本值16计算或读取电负载电流的相关联的实际有效值11。
41.在步骤s3中,可以规定,控制器设备1将所确定的电负载电流的实际有效值11与电负载电流要实现的设定点有效值6进行比较,以便确定电负载电流的差值25。
42.在步骤s4中,可以规定,控制器设备1根据电负载电流的差值25计算电压脉冲序列4的适配占空比26。控制器设备1可以修改电压脉冲序列4的占空比10,由此可以用具有适配占空比26的适配电压脉冲序列27代替电压脉冲序列4。
43.该方法可以执行至少一次。在进一步的步骤中,可以规定,从步骤s1开始重复该方法。
44.总之,该示例显示了本发明如何能够减少用于控制负载电流的有效值的部件的数量。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。