1.本发明属于医用设备技术领域,特别涉及一种医用无菌手套自动穿戴设备。
背景技术:
2.医用手套是医护人员最常用的工具之一,为了避免交叉感染,每接触一个患者之后就需要更换一副新的医用手套。目前医护人员穿戴医用手套时,需要将手套从包装盒中取出,自己进行穿戴,导致在医护人员用手直接拿取手套穿戴时,会接触手套外部,破坏了手套的无菌性。
3.申请号为cn2016104780800的专利公开了一种穿戴手套设备,包括箱体、气体抽压装置、控制开关等,通过大气压强原理使手套扩展收缩完成穿戴,但是在使用时,对大气压强等周围环境要求较高,而且需要事先对手套进行装套,操作繁琐。针对以上问题,本发明提供了一种医用无菌手套自动穿戴设备。
技术实现要素:
4.针对上述技术问题,本发明所采用的技术方案是:一种医用无菌手套自动穿戴设备,包括底座、抓取机构、撑口机构;所述的底座包括外壳、手套传送带,所述的手套传送带安装在外壳上。
5.所述的抓取机构安装在外壳上,所述的抓取机构包括导轨、抓取组件,所述的导轨固定安装在外壳上,所述的抓取组件滑动安装在导轨上,用于抓取无菌手套。
6.所述的撑口机构安装在外壳上,所述的撑口机构包括t型块、滑动板,所述的t型块固定安装在外壳上,所述的滑动板滑动安装在t型块上,用于撑开手套的口。
7.进一步的,所述的抓取机构还包括滑动齿条,所述的滑动齿条固定安装在导轨上,所述的滑动齿条上啮合配合有滚动齿轮,所述的滚动齿轮固定安装在电机的输出轴上,所述的电机固定安装在抓取组件中的安装架上。
8.进一步的,所述的抓取组件还包括升降丝杠,所述的升降丝杠有四个,螺纹连接在安装架上,所述的升降丝杠上螺纹连接有升降架,所述的升降架上转动安装有四个开合丝杆,对称布置,所述的开合丝杆上螺纹安装有夹爪,开合圆锥齿轮固定安装在开合丝杆上,所述的开合圆锥齿轮与开合主动圆锥齿轮啮合配合,所述的开合主动圆锥齿轮固定安装在开合电机的输出轴上,所述的开合电机固定安装在升降架上。
9.进一步的,所述的升降丝杠上固定安装有带轮,所述的带轮上转动安装有旋转传送带,一个带轮与转动电机的输出轴固定连接,所述的转动电机固定安装在安装架上。
10.进一步的,所述的撑口机构还包括撑口电机,所述的撑口电机固定安装在外壳上,所述的撑口电机输出轴上固定安装有圆盘一,所述的圆盘上固定安装有伸缩气缸,所述的伸缩气缸的输出端上固定安装有圆盘二,所述的圆盘二与转动短轴固定连接,所述的转动短轴滑动安装在外壳上,中心圆柱齿轮固定安装在转动短轴上,所述的中心圆柱齿轮与推送圆柱齿轮啮合配合,所述的推送圆柱齿轮安装在锁定组件上。
11.进一步的,所述的锁定组件有四个,所述的锁定组件包括长圆柱齿轮、主动圆锥齿轮,所述的推送圆柱齿轮与长圆柱齿轮、主动圆锥齿轮固定安装在同一根转轴上,所述的转轴转动安装在外壳上,所述的长圆柱齿轮与小圆柱齿轮啮合配合,所述的小圆柱齿轮有两个,对称布置,所述的小圆柱齿轮固定安装在推送丝杠的一端,所述的推送丝杠另一端螺纹安装有弧形夹块,所述的推送丝杠转动安装在滑动板上,所述的弧形夹块滑动安装在滑动板上,所述的滑动板远离长圆柱齿轮的一侧设置有槽。
12.进一步的,所述的锁定组件还包括外转轴一、外转轴二,所述的外转轴一和外转轴二转动安装在外壳上,所述的外转轴一两端固定安装有从动圆锥齿轮,所述的外转轴二两端与中间均固定安装有从动圆锥齿轮,所述的从动圆锥齿轮与主动圆锥齿轮啮合配合,以驱动主动圆锥齿轮转动。
13.进一步的,所述的撑口机构还包括连接圆柱齿轮,当伸缩气缸伸出时,推动转动短轴向前滑动,所述的中心圆柱齿轮与连接圆柱齿轮啮合配合,所述的连接圆柱齿轮固定安装在转轴一上,所述的转轴一转动安装在外壳上,所述的转轴一上安装有圆锥齿轮组,所述的圆锥齿轮组输出轴上转动安装有同步带的一端,所述的同步带另一端转动安装在内转动轴上,所述的内转动轴转动安装在外壳上,所述的内转动轴上固定安装有内齿轮,所述的内齿轮与内齿条啮合配合,所述的内齿条固定安装在滑动板上,所述的滑动板前端固定安装有弧形挡板。
14.进一步的,所述的内转动轴有四个,对称布置,转动安装在外壳上,所述的内转动轴两端固定安装有圆锥齿轮,相邻的两个内转动轴上的圆锥齿轮啮合配合。
15.本发明与现有技术相比的有益效果是:(1)本发明通过抓取机构、撑口机构实现医用手套的无菌穿戴,无需人为接触可直接穿戴,避免了细菌的传播的危险;(2)抓取机构通过开合丝杆控制夹爪的开合,能根据具体手套的尺寸,控制手套的开口大小,操作简单,实用性强。
附图说明
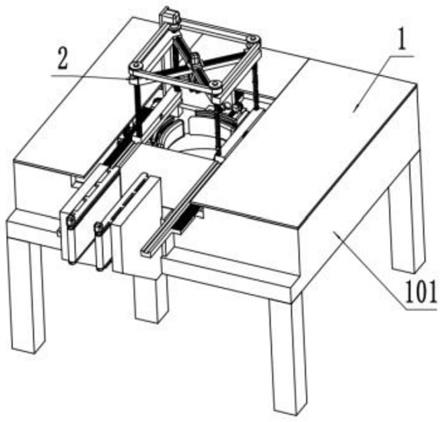
16.图1为本发明整体结构示意图。
17.图2为外壳内部结构示意图。
18.图3为抓取机构部分结构示意图一。
19.图4为抓取机构部分结构示意图二。
20.图5为抓取机构部分结构示意图三。
21.图6为外壳、撑口机构结构示意图。
22.图7为撑口机构结构示意图。
23.图8为撑口机构部分结构示意图一。
24.图9为撑口机构部分结构示意图二。
25.图10为撑口机构部分结构示意图三。
26.附图标号:1
‑
底座;101
‑
外壳;102
‑
手套传送带;2
‑
抓取机构;201
‑
导轨;202
‑
滑动齿条;203
‑
滚动齿轮;204
‑
安装架;205
‑
升降丝杠;206
‑
升降架;207
‑
开合丝杆;208
‑
夹爪;209
‑
开合圆锥齿轮;210
‑
开合电机;211
‑
开合主动圆锥齿轮;212
‑
旋转传送带;213
‑
转动电机;3
‑
撑口机构;301
‑
撑口电机;302
‑
伸缩气缸;303
‑
转动短轴;304
‑
推送圆柱齿轮;305
‑
长
圆柱齿轮;306
‑
小圆柱齿轮;307
‑
推送丝杠;308
‑
弧形夹块;309
‑
滑动板;310
‑
主动圆锥齿轮;311
‑
从动圆锥齿轮;312
‑
外转轴一;313
‑
外转轴二;314
‑
中心圆柱齿轮;315
‑
连接圆柱齿轮;316
‑
同步带;317
‑
内转动轴;318
‑
内齿轮;319
‑
内齿条。
具体实施方式
27.下面结合具体实施例对本发明作进一步描述,在此发明的示意性实施例以及说明用来解释本发明,但并不作为对本发明的限定。
28.其中,附图仅用于示例性说明,表示的仅是示意图,而非实物图,不能理解为对本专利的限制;为了更好地说明本发明的实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸,对本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。
29.实施例:如图1—10所示的一种医用无菌手套自动穿戴设备,包括底座1、抓取机构2、撑口机构3;底座1包括外壳101、手套传送带102,手套传送带102安装在外壳101上。工作时候,将无菌手套通过消毒设备放在手套传送带102之间,启动手套传送带102将手套向前传送。
30.抓取机构2安装在外壳101上,抓取机构2包括导轨201、抓取组件,导轨201固定安装在外壳101上,抓取组件滑动安装在导轨201上,用于抓取无菌手套。
31.撑口机构3安装在外壳101上,撑口机构3包括t型块、滑动板309,t型块固定安装在外壳101上,滑动板309滑动安装在t型块上,用于撑开手套的口。
32.抓取机构2还包括滑动齿条202,滑动齿条202固定安装在导轨201上,滑动齿条202上啮合配合有滚动齿轮203,滚动齿轮203固定安装在电机的输出轴上,电机固定安装在抓取组件中的安装架204上。启动安装架204中的电机,带动滚动齿轮203转动,滚动齿轮203在滑动齿条202上转动带动安装架204沿着导轨201向靠近手套传送带102的一侧滑动,从而带动整个抓取组件移动。
33.抓取组件还包括升降丝杠205,升降丝杠205有四个,升降丝杠205上固定安装有带轮,带轮上转动安装有旋转传送带212,一个带轮与转动电机213的输出轴固定连接,转动电机213固定安装在安装架204上,升降丝杠205螺纹连接在安装架204上,升降丝杠205上螺纹连接有升降架206,升降架206上转动安装有四个开合丝杆207,对称布置,开合丝杆207上螺纹安装有夹爪208,开合圆锥齿轮209固定安装在开合丝杆207上,开合圆锥齿轮209与开合主动圆锥齿轮211啮合配合,开合主动圆锥齿轮211固定安装在开合电机210的输出轴上,开合电机210固定安装在升降架206上。启动转动电机213,带动旋转传送带212转动,从而使得升降丝杠205转动,此时升降架206沿着升降丝杠205向下移动,使得夹爪208靠近手套传送带102上的手套,当夹爪208下降到手套口内部时候,启动开合电机210,带动开合主动圆锥齿轮211转动,通过开合主动圆锥齿轮211驱动开合圆锥齿轮209转动,此时开合圆锥齿轮209所在的开合丝杆207转动,就会带动夹爪208向远离开合电机210的方向移动,通过夹爪208将手套的口撑开,启动电机,夹爪208回到四个滑动板309的正上方。
34.撑口机构3还包括撑口电机301,撑口电机301固定安装在外壳101上,撑口电机301输出轴上固定安装有圆盘一,圆盘上固定安装有伸缩气缸302,伸缩气缸302的输出端上固定安装有圆盘二,圆盘二与转动短轴303固定连接,转动短轴303滑动安装在外壳101上,中
心圆柱齿轮314固定安装在转动短轴303上,中心圆柱齿轮314与推送圆柱齿轮304啮合配合,推送圆柱齿轮304安装在锁定组件上。
35.锁定组件有四个,锁定组件包括长圆柱齿轮305、主动圆锥齿轮310,推送圆柱齿轮304与长圆柱齿轮305、主动圆锥齿轮310固定安装在同一根转轴上,转轴转动安装在外壳101上,长圆柱齿轮305与小圆柱齿轮306啮合配合,小圆柱齿轮306有两个,对称布置,小圆柱齿轮306固定安装在推送丝杠307的一端,推送丝杠307另一端螺纹安装有弧形夹块308,推送丝杠307转动安装在滑动板309上,弧形夹块308滑动安装在滑动板309上,滑动板309远离长圆柱齿轮305的一侧设置有槽。
36.锁定组件还包括外转轴一312、外转轴二313,外转轴一312和外转轴二313转动安装在外壳101上,外转轴一312两端固定安装有从动圆锥齿轮311,外转轴二313两端与中间均固定安装有从动圆锥齿轮311,从动圆锥齿轮311与主动圆锥齿轮310啮合配合,以驱动主动圆锥齿轮310转动。
37.撑口机构3还包括连接圆柱齿轮315,当伸缩气缸302伸出时,推动转动短轴303向前滑动,中心圆柱齿轮314与连接圆柱齿轮315啮合配合,连接圆柱齿轮315固定安装在转轴一上,转轴一转动安装在外壳101上,转轴一上安装有圆锥齿轮组,圆锥齿轮组输出轴上转动安装有同步带316的一端,同步带316另一端转动安装在内转动轴317上,内转动轴317转动安装在外壳101上,内转动轴317上固定安装有内齿轮318,内齿轮318与内齿条319啮合配合,内齿条319固定安装在滑动板309上,滑动板309前端固定安装有弧形挡板。
38.内转动轴317有四个,对称布置,转动安装在外壳101上,内转动轴317两端固定安装有圆锥齿轮,相邻的两个内转动轴317上的圆锥齿轮啮合配合。
39.启动撑口电机301,带动伸缩气缸302、转动短轴303一起转动,转动短轴303上的中心圆柱齿轮314驱动推送圆柱齿轮304转动,使得推送圆柱齿轮304所在转轴上的长圆柱齿轮305和主动圆锥齿轮310一起转动,长圆柱齿轮305转动使得小圆柱齿轮306转动,通过推送丝杠307转动将弧形夹块308和弧形挡板分开。推送圆柱齿轮304和长圆柱齿轮305所在转轴上的主动圆锥齿轮310会随着转轴一起转动,从而带动外转轴一312上的从动圆锥齿轮311转动,外转轴一312上的从动圆锥齿轮311使外转轴二313上的从动圆锥齿轮311转动,从而实现带动其他三个锁定组件运动。当四个弧形夹块308都移动完毕后,启动转动电机213使得夹爪208向下移动,然后启动开合电机210使得夹爪208张开,将手套上方的皮筋移动到夹爪208的槽中,再通过带动小圆柱齿轮306移动,使得弧形夹块308与弧形挡板贴合,然后将夹爪208向上升起,此时手套固定在了弧形夹块308与弧形挡板之间。
40.伸缩气缸302伸出,将转动短轴303向前推动,使得中心圆柱齿轮314与连接圆柱齿轮315啮合,通过圆锥齿轮组带动同步带316转动,内转动轴317随着同步带316一起转动,内转动轴317有四个,每个内转动轴317两端都安装有圆锥齿轮,所以当一个内转动轴317转动时候,其余三个都会转动,从而同步使得内转动轴317上的内齿轮318转动,内齿条319随着内齿轮318的转动向外滑动,这样四个内齿轮318相互远离,就将手套的口撑开,然后医护人员将手伸进去,完成穿戴。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
