1.本发明涉及了一种汽车辅助控制系统,尤其是涉及了一种基于毫米波雷达的紧急转向系统和控制方法。
背景技术:
2.随着世界范围内各国生活水平的提高,汽车保有量持续地增加,同时各类交通事故以及由此引发的人员伤亡和财产损失案例也不断增长。虽然abs、esp等安全技术地应用使得在极端工况下车辆的操控稳定性有一定的提高,但是依旧不足以完全防止交通事故的发生。根据道路交通事故数据显示,有约四成的交通事故发生时司机没有采取任何有效的回避动作;另外汽车碰撞事故约占全部交通事故的六七成。这些交通事故中,由于驾驶者在紧急的工况下存在认知延迟或操作不当而造成无法避免事故的发生。
技术实现要素:
3.为了解决背景技术中存在的问题,本发明所提供一种基于毫米波雷达的紧急转向系统和控制方法,有效的减少碰撞事故的发生,保护人员和财产安全。
4.本发明采用的技术方案是:
5.本发明主要针对在这种即将发生碰撞事故的紧急情况下,避免因驾驶员无法进行有效避撞措施而发生事故。本发明主要是结合此类情况,在车辆的四周安装有4个毫米波雷达用于感知周围车况。当即将发生碰撞事故时,本系统能够根据毫米波雷达得到的车况信息判断出能否有效避撞并计算出一条安全稳定的转向路径,同时系统会监控驾驶员是否有打转向的意图,如果发现有此意图则通过can网络发送控制指令给转向控制模块来控制方向盘进行有效的避撞动作。通过有效的避撞行为,本系统能够显著地避免此类的交通事故发生,减少人员伤亡和财产损失。
6.本系统主要安装在车辆车身四周的毫米波雷达对周围的路况信息进行感知监测,当毫米波雷达识别出前方存在车辆并把车辆信息通过can网络传输给系统主控,并且系统主控根据自身车辆和前方车辆信息判断出即将与前车发生碰撞时,根据当前的周围车况并判断能够安全转向变道的情况下本系统计算出一条安全稳定的变道轨迹,然后发送控制命令给转向控制模块并且发送提示报警信息提示驾驶员注意转向安全。转向控制模块控制方向盘沿先前计算出的轨迹,在原碰撞点之前能够安全地进行转向防止碰撞,保护车内乘员的安全性。
7.本发明的有益效果是:
8.一、一种紧急转向控制系统:
9.包括毫米波雷达,布置在车身周围,探测获得车身周围的车况信息,并发送到车身can网络;
10.包括车身can网络,接收车况信息并发送到车辆系统主控;
11.包括车辆系统主控,通过can网络接收毫米波雷达的车况信息,并采集自身的车辆
信息,结合车况信息和车辆信息判断出是否能够进行安全的紧急转向:若能进行进行安全的紧急转向,则处理获得一条安全的转向避障路径,根据转向避障路径转换产生转向控制信号并发送到转向控制模块;
12.包括转向控制模块,根据转向控制信号自动控制方向盘进行紧急转向。
13.车身四周各布置装有一个毫米波雷达。前侧的毫米波雷达能够前车的位置,如果在理想状况下可以不考虑周围环境则可以只使用前侧的毫米波雷达。通过后侧和两边的毫米波雷达能够确认后方和两边的路况环境是否能够满足转向的需求,在非理想状况等复杂情况下通过通过后侧和两边的毫米波雷达能够确认后方和两边的路况环境进而进行紧急转向控制。
14.还包括制动系统模块;
15.所述车辆系统主控中,若不能进行进行安全的紧急转向,则处理产生制动控制信号并发送到制动系统模块,由制动系统模块根据制动控制信号自动控制制动器进行紧急制动。
16.所述的车辆系统主控在产生转向控制信号的同时产生提示报警信息,在主控台上向驾驶员提醒呈现。
17.所述的紧急转向系统布置在本车上,通过本车车身前方布置的毫米波雷达探测本车和前车之间的纵向距离和横向距离。纵向距离为沿行驶方向的距离,横向距离为沿垂直于行驶方向的距离。
18.本发明针对本车和前车在沿同一路线上前后行驶的情况,本车相对于前车靠近行驶。
19.所述的车况信息包括了当前本车和前车之间的距离、相对速度,所述的车辆信息包括了当前本车的速度。
20.二、应用于上述紧急转向系统的一种紧急转向控制方法:
21.通过毫米波雷达实时获得当前本车和前车之间的距离δd、相对速度,按照以下进行紧急转向避撞控制处理:
22.经过时间t的本车车辆的转向角度按照以下公式获得:
23.θ=k sin(at)
24.其中,k表示角度倍数,a表示时间周期系数;
25.根据转向角度θ实时处理获得经过时间t内前车和本车沿行驶路径的距离为:
[0026][0027][0028]
其中,v0和v1分别表示本车和前车的速度,x1表示前车在沿行驶路径上的纵向行驶距离,y1表示前车在沿行驶路径上的横向行驶距离,δd表示经过时间t前的前车和本车之间的纵向距离;x0表示本车在沿行驶路径上的纵向行驶距离,y0表示本车在沿行驶路径上的
横向行驶距离,d
t
表示本车经过时间t内的行驶距离;d
t
表示的是本公式中要积分的积分变量为t。
[0029]
根据实时获得的前车的纵向行驶距离x1、横向行驶距离y1以及本车的纵向行驶距离x0、横向行驶距离y0,代入以下公式并进行判断:
[0030][0031]
其中,w表示车宽,d表示车间安全距离;
[0032]
若同时满足上述两个公式,则能够进行安全的紧急转向。
[0033]
本发明是对主动防碰撞技术的有效补充,系统主要解决了目前多采用纵向制动介入方式实现避撞的前向防碰撞系统在相对速度过高、路面附着条件差、与障碍物重叠率低等特定场景下存在制动距离过长而造成无法完全避撞的问题。
[0034]
本发明有效的提高了车辆在碰撞事故将要发生时的安全性,进一步保护车内乘员的安全。
附图说明
[0035]
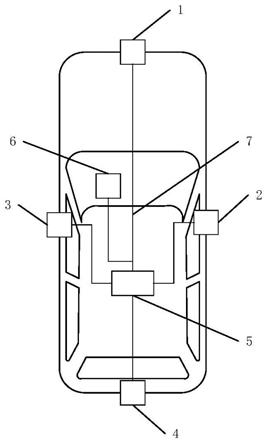
图1为基于毫米波雷达的紧急转向系统的系统框图俯视图
[0036]
图中:1
‑
4、毫米波雷达,5、系统主控,6、转向控制模块,7、can网络。
[0037]
图2为基于毫米波雷达的紧急转向系统的转向避障路径图
[0038]
图中:δx为转向避撞完成时的纵向位移,δy为转向避撞完成时的横向位移。
具体实施方式
[0039]
下面结合附图及具体实施例对本发明作进一步详细说明。
[0040]
如图1所示,系统包括:
[0041]
包括毫米波雷达1
‑
4,车身四周各布置装有一个毫米波雷达,共计有四个毫米波雷达,探测获得车身周围的车况信息,并发送到车身can网络7;
[0042]
包括车身can网络7,接收车况信息并发送到车辆系统主控;
[0043]
包括车辆系统主控5,通过can网络接收毫米波雷达的车况信息,并采集自身的车辆信息,结合车况信息和车辆信息判断出是否能够进行安全的紧急转向:若能进行进行安全的紧急转向,则处理获得一条安全的转向避障路径,根据转向避障路径转换产生转向控制信号并发送到转向控制模块6;若不能进行进行安全的紧急转向,则处理产生制动控制信号并发送到制动系统模块;
[0044]
包括转向控制模块6,根据转向控制信号自动控制方向盘进行紧急转向。
[0045]
包括制动系统模块;由制动系统模块根据制动控制信号自动控制制动器进行紧急制动。
[0046]
车辆系统主控在产生转向控制信号的同时产生提示报警信息,在主控台上向驾驶员提醒呈现,以提醒将进行紧急转向控制的信息。
[0047]
紧急转向系统布置在本车上,通过本车车身前方布置的毫米波雷达1探测本车和前车之间的纵向距离和横向距离。
[0048]
安装在车辆四周的毫米波雷达1
‑
4识别到行人、车辆或其他障碍物,从而对周围的车况进行监控,并实时把障碍物信息数据通过can网络7发送给车辆系统主控5。
[0049]
如果在某一时刻,车辆系统主控5根据车况数据发现前方将发生碰撞事故。在这种紧急情况下若驾驶员因认知延迟或操作不当而没有采取有效的措施,车辆系统主控5将会立刻根据毫米波雷达1
‑
4得到的四周车况信息对能否安全避撞进行判定并计算出一条安全平稳的转向路径(图2),然后通过提示警示信号提醒驾驶员,然后系统开始监测驾驶员的转向意图,一旦检测到驾驶员开始转向,则开始接管车辆,系统结合当前车速把路径信息转化成转向控制指令通过can网络7发送给转向控制模块6。
[0050]
转向控制模块6根据给定的控制指令控制方向盘转角,使车辆在原碰撞点前沿着计算出的转向路径(图2)进行避撞动作,与此同时车辆系统主控5还会根据实时的车辆路径与计划好的路径进行比较并修正,防止因偏离既定轨迹而造成其他事故。当完成紧急转向避撞动作后,车辆系统主控5会提醒驾驶员重新接管方向盘继续正常行驶。
[0051]
转向避障路径key6i按照以下规则设置:1、规划路径曲率平滑且二阶导数连续;2、路径纵向避让距离尽量短;3、路径极值较小;4、车辆侧向位移量较小;5、曲率边界条件;6、单值函数的边界条件;7、以时间为参数自变量的边界条件。
[0052]
具体实施采用了五次多项式来拟合描述转向避障路径,能够在各个时间点的横向加速度曲线光滑且连续,较为符合大多数驾驶员的行为习惯。根据路径边界条件并满足路径初始点和种子点边界要求的前提下,能够得到期望的路径(图2)。
[0053]
本发明的具体实施转向控制过程如下:
[0054]
通过毫米波雷达1
‑
4实时获得当前本车和前车之间的距离δd、相对速度,按照以下进行紧急转向避撞控制处理:
[0055]
具体设置车辆前进方向为纵向,表示为x,横向为y。
[0056]
以转向角度平顺情况考虑,车辆系统主控5通过采集自身的车辆信息获得角度倍数k和时间周期系数a,经过时间t的本车车辆的转向角度按照以下公式获得:
[0057]
θ=k sin(at)
[0058]
其中,k表示角度倍数,a表示时间周期系数,k和a均为常数参数;
[0059]
根据转向角度θ实时处理获得经过时间t内前车和本车沿行驶路径的距离为:
[0060][0061][0062]
其中,v0和v1分别表示本车和前车的速度,由于前车和本车均沿同一路线行驶,因此前车和本车的两车横向偏移为0,x1表示前车在沿行驶路径上的纵向行驶距离,y1表示前车在沿行驶路径上的横向行驶距离,δd表示经过时间t前的前车和本车之间的纵向距离;
x0表示本车在沿行驶路径上的纵向行驶距离,y表示本车在沿行驶路径上的横向行驶距离,d
t
表示本车经过时间t内的行驶距离;
[0063]
根据实时获得的前车的纵向行驶距离x1、横向行驶距离y1以及本车的纵向行驶距离x0、横向行驶距离y0,代入以下公式并进行判断:
[0064][0065]
其中,w表示车宽,d表示车间安全距离;
[0066]
若同时满足上述两个公式,则能够进行安全的紧急转向。
[0067]
若无法同时满足上述两个公式,则产生制动控制信号进行制动尽量减速来避免事故或者减轻事故损失。
[0068]
当x1=x0时,则前车和本车的两车在纵向方向上会碰撞,此时若|y0‑
y1|≥w d则判定为能够通过紧急转向来避撞,能够进行安全的紧急转向。
[0069]
当|y0‑
y1|=w d且x1≥x0时,也判定能够紧急转向避撞,能够进行安全的紧急转向。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。