1.本发明涉及敏捷遥感卫星技术领域,特别涉及一种基于启发式链条优化组合方法。
背景技术:
2.随着敏捷卫星的发展,敏捷卫星的姿态机动能力越来越强,对于突发事件具备了通过快速的姿态机动完成对特定区域的快速指向,并通过区域凝视对任务区域持续观测。然而对于任务的响应需要具备实时的在轨规划能力,需要及时合理调度卫星资源实现尽可能高的观测收益。在宽幅载荷或其他信息形成大范围内的大量待观测的点目标,飞越的敏捷卫星从地面上注或者星间链路获得这些点目标的位置信息及状态评估信息,敏捷卫星需要依据这些信息通过规划在卫星过境的有限时间内,对尽量多的点目标完成观测。
3.如在山火蔓延时,实现一次过境对多个火点的有效探测。敏捷成像卫星任务规划问题难于求解。任务规划问题的指数爆炸特征十分明显。但敏捷遥感卫星面临着在轨自主能力与姿态机动能力逐步缩小差距的需求,如何有效地实现敏捷遥感卫星基于在轨资源及任务需求进行有效的自主快速任务规划,是提升敏捷遥感卫星应用能力的关键环节。
4.在随机的单次仿真中发现链条的长度与组合在不同的场景下如选择单一的长度标准和连接原则会造成一些较佳链条的未选择;同时如果不针对目标数量进行优化,任务规划方法会出现一些较佳链条的未选择。
技术实现要素:
5.本发明的目的在于提供一种基于启发式链条优化组合方法,以解决敏捷遥感卫星在轨接收应急任务,在一次过境的有限时间窗口内对多个点目标进行观测与观测路径规划不合理的问题。
6.为解决上述技术问题,本发明提供一种基于启发式链条优化组合方法,所述基于启发式链条优化组合方法包括:
7.所述基于启发式链条优化组合方法包括:
8.按照多目标的观测权重将多目标分为多个等级,或按照多目标的位置靠各个簇团中心的距离将多目标分为多个等级;
9.将同一等级的目标组成同一观测序列,并形成多个观测序列,并按目标的等级对所述多个观测序列进行排序连接,当最高等级的观测序列最长时输出该最终排序。
10.可选的,在所述的基于启发式链条优化组合方法中,还包括:
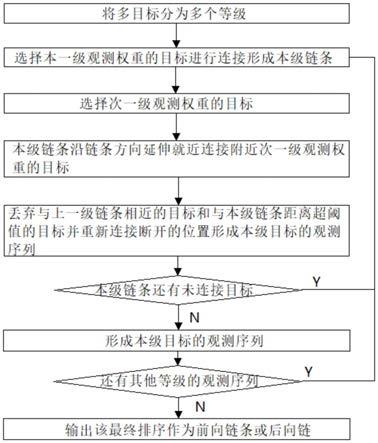
11.步骤一,将多目标分为多个等级;
12.步骤二,选择本一级观测权重的目标进行连接形成本级链条;
13.步骤三,选择次一级观测权重的目标;
14.步骤四,本级链条沿链条方向延伸就近连接附近次一级观测权重的目标;
15.步骤五,丢弃与上一级链条相近的目标和与本级链条距离超阈值的目标,并重新
连接断开的位置形成本级目标的观测序列;
16.步骤六,判断本级链条是否还有未连接目标,若是则返回至步骤二,否则形成本级目标的观测序列;
17.步骤七,判断是否还有其他等级的观测序列,若是则返回至步骤二,否则输出该最终排序。
18.可选的,在所述的基于启发式链条优化组合方法中,输出的最终排序作为前向链条或后向链条,具体包括:
19.获取多目标的经纬度信息、观测权重及观测开始点信息,作为任务规划的输入条件;
20.根据所述多目标的经纬度信息、观测权重及观测开始点信息,在前向观测时将连续几个处于前向观测的目标组合成为前向的观测序列,形成多个前向链条;
21.根据所述多目标的经纬度信息、观测权重及观测开始点信息,在后向观测时将连续几个处于后向观测的目标组合成为后向的观测序列,形成多个后向链条。
22.可选的,在所述的基于启发式链条优化组合方法中,根据不同的前向链条和后向链条组合后的收益,结合观测方向所产生的姿态机动代价,确定前向链条和后向链条组合,并根据所述前向链条和后向链条组合调整前向链条或后向链条上目标的数量,计算出所述前向链条和后向链条组合的切换点,形成过境期间的完整观测序列,完成任务规划;
23.所述前向链条和后向链条组合的切换点包括:
24.当所述敏捷遥感卫星进入观测开始点上空时,采取仰视角度并左右变换摇摆角度,对前向链条上的目标进行观测;
25.当所述敏捷遥感卫星来到切换点上空时,采取俯视角度并左右变换摇摆角度,对后向链条上的目标进行观测。
26.可选的,在所述的基于启发式链条优化组合方法中,根据不同的前向链条和后向链条组合后的收益,结合观测方向所产生的姿态机动代价,选择最优的前向链条和后向链条组合包括:
27.通过对于敏捷遥感卫星在一次过境中对于多目标的观测收益进行总和计算,对前后向链条优化组合的规划收益进行评价,目标收益函数:
[0028][0029]
其中:pi为本次敏捷遥感卫星过境的全部目标观测的总收益;n表示第n个观测目标;cn为第n个观测目标的观测时间;w
n
为第n个观测目标的权重,权重与观测时间的乘积作为第n个观测目标的实际观测权重;
[0030]
t
θ,n
为向第n个观测目标机动花费的滚动向机动时间;为向第n个观测目标机动花费的俯仰向机动时间;k为姿态机动时间消耗权重。
[0031]
可选的,在所述的基于启发式链条优化组合方法中,所述目标的数量为30个~100个;
[0032]
若两个目标之间的沿迹向与切迹向的距离,小于目标在此观测角度的视场的宽度与长度,则将该两个目标进行合并,以该两个目标连线的中心点为指向点,作为一个目标进
行规划;
[0033]
所述敏捷遥感卫星搭载一伺服机构,所述伺服机构驱动观测相机进行观测,所述敏捷遥感卫星的最大俯仰方向姿态机动速度不超过4
°
/s;所述伺服机构的最大俯仰方向姿态机动速度为5
°
/s
‑8°
/s。
[0034]
可选的,在所述的基于启发式链条优化组合方法中,所述基于启发式链条优化组合方法还包括:所述敏捷遥感卫星观测前向链条与后向链条的姿态机动范围由滚动方向最大机动角与俯仰方向最大机动角决定,其中:
[0035]
所述滚动方向姿态机动范围为:
[0036][0037]
所述俯仰方向姿态机动范围为:
[0038][0039]
所述敏捷遥感卫星的轨道高度为800km~1000km,滚动方向最大机动角为θ
max
=45
°
;俯仰方向最大机动角为
[0040]
可选的,在所述的基于启发式链条优化组合方法中,所述敏捷遥感卫星观测前向链条与后向链条的姿态机动时间范围由滚动方向姿态机动速度与俯仰方向姿态机动速度决定,其中:
[0041]
滚动方向姿态机动时间范围为:
[0042][0043]
其中,ω
θ,n
为滚动方向姿态机动速度,ω
θ,n
‑
max
为敏捷遥感卫星能够达到的最大滚动方向姿态机动速度;
[0044]
俯仰方向姿态机动时间范围为:
[0045][0046]
其中,为俯仰方向姿态机动速度,为敏捷遥感卫星能够达到的最大俯仰方向姿态机动速度。
[0047]
可选的,在所述的基于启发式链条优化组合方法中,敏捷卫星具备滚动轴与俯仰轴两轴自由度的姿态机动能力,两维自由度的目标观测模式下,具备滚动向的姿态机动能力的同时具备俯仰轴的机动能力,敏捷遥感卫星具备在未飞达目标时对目标进行前向的观测,以及在飞越目标之后对目标进行后向的观测。
[0048]
可选的,在所述的基于启发式链条优化组合方法中,对以不同的机动能力设置了不同数量的待观测目标场景进行仿真,以提出观测目标数量与机动能力对本方法形成观测路径的影响;
[0049]
根据经过打靶分析的结果,选择前向和后向链条的数量,获得更好的组合收益;
[0050]
打靶分析的结果包括:在驻留时间较短的场景下前向和后向链条长度接近的组合方式能够获得较好的观测数量,随着观测时间的增加,后向链条的长度增加有助于调高观测效能。
[0051]
本发明提出一种基于启发式前后链条优化组合的点目标观测路径序列规划算法,并通过蒙特卡洛打靶进行了不同任务条件下的链条优化,为未来的在轨应用奠定了一定的技术基础。其核心思想是将一次前向或者后向上的观测对尽可能多的目标进行观测,而可以观测的范围取决于抽象后的链条的长度,将输入的目标根据相邻关系进行不同链条得组合,以姿态的机动能力作为约束进行链条长度的优化,并由少及多地进行无用目标点的删除,再逐一评估链条间的联通性,进行较短间隔的链条相连。
[0052]
本实施例通过不同目标分布、卫星姿态机动能力情况下的蒙特卡洛打靶仿真,分析得到了不同任务输入下的链条选择策略,方法有效,观测收益高,计算开销小,可应用于敏捷卫星面向大量点目标的在轨自主任务规划应用。
[0053]
本发明从工程应用出发,针对具备两个轴向自由度的敏捷遥感卫星,在一次过境对多目标的观测,提出了一种以其姿态机动能力为约束的前后向链条优化组合方法;建立了问题模型与目标函数,并完成了前后向链条优化组合方法的算法设计。
[0054]
在本发明提供的基于启发式链条优化组合方法中,通过在前向观测时采用连续几个处于前向观测的目标组合成为前向的观测序列,在后向观测时采用连续几个处于后向观测的目标组合成为后向的观测序列,并根据不同的前向链条和后向链条组合后的收益,结合观测方向所产生的姿态机动代价,实现了选择最优的前向链条和后向链条组合,形成过境期间的完整观测序列,完成任务规划,进一步实现了敏捷遥感卫星对于在轨多目标观测任务具备实时响应能力,即求解方法在较短时间内获得满足任务要求的规划结果。
[0055]
进一步的,通过当敏捷遥感卫星采取俯仰视角度并左右变换摇摆角度,对前后向链条上的目标进行观测,使敏捷遥感卫星具备了对卫星姿态机动能力的有效利用,即充分考虑卫星在滚动与俯仰向的姿态机动能力。
[0056]
在本发明提供的基于启发式链条优化组合方法中,敏捷卫星具备滚动轴与俯仰轴两轴自由度的姿态机动能力。如果只考虑滚动轴一维的姿态机动能力,则卫星飞越待观测区域的过程中主要采取的观测模式只有左右两侧的正侧视观测模式。一旦卫星飞越目标则卫星不具备对目标的观测可能性。两维自由度的目标观测模式下,卫星不但具备滚动向的姿态机动能力,同时具备俯仰轴的机动能力,因此卫星具备在未飞达目标时对目标进行前向的观测,以及在飞越目标之后对目标进行后向的观测,使得卫星更为灵活的观测模式。具备两个轴向姿态机动自由度的敏捷卫星,不但对于同一目标的观测也可以拥有更长的观测窗口,而且整体上可以获得更大的观测区域,因此对于具备两个自由度的敏捷卫星的规划将有效的提升该类卫星针对不同目标观测需求,自主生产更为灵活的工作模式。
附图说明
[0057]
图1是本发明一实施例敏捷遥感卫星具有两轴自由度观测示意图;
[0058]
图2是本发明一实施例敏捷遥感卫星具有一轴自由度观测示意图;
[0059]
图3是本发明一实施例基于启发式链条优化组合方法形成链条流程示意图;
[0060]
图4是本发明一实施例基于启发式链条优化组合方法视场中目标采样示意图;
[0061]
图5(a)~(d)是本发明一实施例基于启发式链条优化组合方法场景一仿真结果示意图;
[0062]
图6(a)~(d)是本发明一实施例基于启发式链条优化组合方法场景二仿真结果示
意图;
[0063]
图7是本发明一实施例基于启发式链条优化组合方法链条组合分析示意图;
[0064]
图8是本发明一实施例基于启发式链条优化组合方法观测时长分析示意图。
具体实施方式
[0065]
以下结合附图和具体实施例对本发明提出的基于启发式链条优化组合方法作进一步详细说明。根据下面说明和权利要求书,本发明的优点和特征将更清楚。需说明的是,附图均采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本发明实施例的目的。
[0066]
本发明的核心思想在于提供一种基于启发式链条优化组合方法,以解决敏捷遥感卫星在轨接收应急任务,在一次过境的有限时间窗口内对多个点目标进行观测与观测路径规划不合理的问题。
[0067]
为实现上述思想,本发明提供了一种基于启发式链条优化组合方法,所述基于启发式链条优化组合方法包括:获取多目标的经纬度信息、观测权重及观测开始点信息,作为任务规划的输入条件;根据所述多目标的经纬度信息、观测权重及观测开始点信息,在前向观测时将连续几个处于前向观测的目标组合成为前向的观测序列,形成多个前向链条;根据所述多目标的经纬度信息、观测权重及观测开始点信息,在后向观测时将连续几个处于后向观测的目标组合成为后向的观测序列,形成多个后向链条;根据不同的前向链条和后向链条组合后的收益,结合观测方向所产生的姿态机动代价,确定前向链条和后向链条组合,并根据所述前向链条和后向链条组合调整前向链条或后向链条上目标的数量,计算出该组合的切换点,形成过境期间的完整观测序列,完成任务规划。
[0068]
<实施例一>
[0069]
本实施例提供一种敏捷遥感卫星多目标在轨观测方法,如图1所示,所述敏捷遥感卫星多目标在轨观测方法包括:获取多目标的经纬度信息、观测权重及观测开始点信息,作为任务规划的输入条件;根据所述多目标的经纬度信息、观测权重及观测开始点信息,在前向观测时将连续几个处于前向观测的目标组合成为前向的观测序列,形成多个前向链条;根据所述多目标的经纬度信息、观测权重及观测开始点信息,在后向观测时将连续几个处于后向观测的目标组合成为后向的观测序列,形成多个后向链条;根据不同的前向链条和后向链条组合后的收益,结合观测方向所产生的姿态机动代价,确定前向链条和后向链条组合,并根据所述前向链条和后向链条组合调整前向链条或后向链条上目标的数量,计算出该组合的切换点,形成过境期间的完整观测序列,完成任务规划。
[0070]
进一步的,所述敏捷遥感卫星多目标在轨观测方法还包括:当所述敏捷遥感卫星进入观测开始点上空时,采取仰视角度并左右变换摇摆角度,对前向链条上的目标进行观测;当所述敏捷遥感卫星来到切换点上空时,采取俯视角度并左右变换摇摆角度,对后向链条上的目标进行观测。
[0071]
在本实施例提供的敏捷遥感卫星多目标在轨观测方法中,通过在前向观测时采用连续几个处于前向观测的目标组合成为前向的观测序列,在后向观测时采用连续几个处于后向观测的目标组合成为后向的观测序列,并根据不同的前向链条和后向链条组合后的收益,结合观测方向所产生的姿态机动代价,选择最优的前向链条和后向链条组合,形成过境
期间的完整观测序列,完成任务规划,实现了敏捷遥感卫星对于在轨多目标观测任务具备实时响应能力,即求解方法在较短时间内获得满足任务要求的规划结果;通过当敏捷遥感卫星采取俯仰视角度并左右变换摇摆角度,对前后向链条上的目标进行观测,使敏捷遥感卫星具备了对卫星姿态机动能力的有效利用,即充分考虑卫星在滚动与俯仰向的姿态机动能力。
[0072]
在本发明提供的敏捷遥感卫星多目标在轨观测方法中,敏捷卫星具备滚动轴与俯仰轴两轴自由度的姿态机动能力。如果只考虑滚动轴一维的姿态机动能力,如图2所示,则卫星飞越待观测区域的过程中主要采取的观测模式只有左右两侧的正侧视观测模式。一旦卫星飞越目标则卫星不具备对目标的观测可能性。两维自由度的目标观测模式下,如图1所示,卫星不但具备滚动向的姿态机动能力,同时具备俯仰轴的机动能力,因此卫星具备在未飞达目标时对目标进行前向的观测,以及在飞越目标之后对目标进行后向的观测,使得卫星更为灵活的观测模式。具备两个轴向姿态机动自由度的敏捷卫星,不但对于同一目标的观测也可以拥有更长的观测窗口,而且整体上可以获得更大的观测区域,因此对于具备两个自由度的敏捷卫星的规划将有效的提升该类卫星针对不同目标观测需求,自主生产更为灵活的工作模式。
[0073]
在本发明的一个实施例中,如图3所示,在所述的敏捷遥感卫星多目标在轨观测方法中,根据所述多目标的经纬度信息、观测权重及观测开始点信息,前向或后向观测时采用连续几个处于前向或后向观测的目标组合成为前向或后向的观测序列,形成多个前向链条和后向链条包括:按照多目标的观测权重将多目标分为多个等级,或按照多目标的位置靠各个簇团中心的距离将多目标分为多个等级;将同一等级的目标组成同一观测序列,并形成多个观测序列,并按目标的等级对所述多个观测序列进行排序连接,当最高等级的观测序列最长时输出该最终排序作为前向链条或后向链条。将同一等级的目标组成同一观测序列包括:选择本一级观测权重的目标进行连接,形成本级链条,并选择次一级观测权重的目标,所述本级链条沿链条方向延伸,就近连接附近次一级观测权重的目标,丢弃与上一级链条相近的目标和与本级链条距离超阈值的目标并重新连接断开的位置,形成本级目标的观测序列。
[0074]
在本发明的一个实施例中,对多目标的观测权重进行排序,选择一级观测权重的目标进行连接,形成最高级链条,所述最高级链条沿链条方向延伸,就近连接附近的点,并选择二级观测权重的目标,二级观测权重的目标连接形成次高级链条,所述次高级链条沿链条方向延伸,就近连接附近的目标,选择三级观测权重的目标,三级观测权重的目标连接形成低级链条,循环上述步骤直至所述最高级链条的长度最长;所述最高级链条、所述次高级链条和所述低级链条丢弃与上一级链条附近的目标和距离超阈值的目标,形成前向链条或后向链条。
[0075]
在本发明的一个实施例中,如不设置权重则通过聚类获得的靠近各个簇团中心的目标,进行最近目标的链接。再选择次一级权重的目标点进行联通判断,并依次逐级选择进行链接,并在此过程中持续舍弃不适用的目标,及联通性较差的目标。包括:根据所述多目标的经纬度信息、观测权重及观测开始点信息,设计多个前向链条和后向链条还包括:对多目标的位置靠各个簇团中心的距离进行排序,选择距离最小的目标进行连接,形成最高级链条,所述最高级链条沿链条方向延伸,就近连接附近的点,并选择距离次之的目标,距离
次之的目标连接形成次高级链条,所述次高级链条沿链条方向延伸,就近连接附近的目标,选择距离最远的目标,距离最远的目标连接形成低级链条,循环上述步骤直至所述最高级链条的长度最长;所述最高级链条、所述次高级链条和所述低级链条丢弃与上一级链条附近的目标和距离超阈值的目标,形成前向链条或后向链条。
[0076]
如图4所示,在所述的敏捷遥感卫星多目标在轨观测方法中,所述目标的数量为30个~100个;若两个目标之间的沿迹向与切迹向的距离,小于目标在此观测角度的视场的宽度与长度,则将该两个目标进行合并,以该两个目标连线的中心点为指向点,作为一个目标进行规划。
[0077]
可选的,在所述的敏捷遥感卫星多目标在轨观测方法中,根据不同的前向链条和后向链条组合后的收益,结合观测方向所产生的姿态机动代价,选择最优的前向链条和后向链条组合包括:通过对于敏捷遥感卫星在一次过境中对于多目标的观测收益进行总和计算,对前后向链条优化组合的规划收益进行评价,目标收益函数:
[0078][0079]
该目标收益函数主要的优化方向是尽量的对于高优先级的目标进行较长时间的观测,同时将对向该目标进行姿态机动作为主要的约束条件;其中:pi为本次敏捷遥感卫星过境的全部目标观测的总收益;n表示第n个观测目标;cn为第n个观测目标的观测时间;wn为第n个观测目标的权重,权重与观测时间的乘积作为第n个观测目标的实际观测权重;t
θ,n
为向第n个观测目标机动花费的滚动向机动时间;为向第n个观测目标机动花费的俯仰向机动时间;k为姿态机动时间消耗权重。
[0080]
另外,在所述的敏捷遥感卫星多目标在轨观测方法中,所述敏捷遥感卫星多目标在轨观测方法还包括:所述敏捷遥感卫星观测前向链条与后向链条的姿态机动范围由滚动方向最大机动角与俯仰方向最大机动角决定,其中:所述滚动方向姿态机动范围为:
[0081][0082]
所述俯仰方向姿态机动范围为:
[0083][0084]
所述敏捷遥感卫星的轨道高度为800km~1000km,滚动方向最大机动角为θ
max
=45
°
;俯仰方向最大机动角为在所述的敏捷遥感卫星多目标在轨观测方法中,所述敏捷遥感卫星观测前向链条与后向链条的姿态机动时间范围由滚动方向姿态机动速度与俯仰方向姿态机动速度决定,其中:滚动方向姿态机动时间范围为:
[0085][0086]
其中,ω
θ,n
为滚动方向姿态机动速度,ω
θ,n
‑
max
为敏捷遥感卫星能够达到的最大滚动方向姿态机动速度;
[0087]
俯仰方向姿态机动时间范围为:
[0088][0089]
其中,为俯仰方向姿态机动速度,为敏捷遥感卫星能够达到的最大俯仰方向姿态机动速度。为了将问题简化,将重点用于任务规划,故这里ω
θ,n
,为平均的滚动向姿态机动速度,不考虑实际在轨过程中的加减速过程。采用较大的姿态机动速度可以获得较短的姿态机动时间,最短为t
θ,n
‑
min
与最大的姿态机动速度会消耗较大的卫星姿态机动资源,获得较低的姿态机动时间消耗权重k。在该问题中,我们主要考虑以卫星本体进行姿态机动的情况,最大的姿态机动速度不超过4
°
/s;以及以转台为指向的情况,角度机动范围为5
°
/s
‑8°
/s。具体的,当所述敏捷遥感卫星搭载一伺服机构,所述伺服机构驱动观测相机进行观测时,所述敏捷遥感卫星的最大俯仰方向姿态机动速度不超过4
°
/s;所述伺服机构的最大俯仰方向姿态机动速度为5
°
/s
‑8°
/s。
[0090]
本发明提出一种基于启发式前后链条优化组合的点目标观测路径序列规划算法,并通过蒙特卡洛打靶进行了不同任务条件下的链条优化,为未来的在轨应用奠定了一定的技术基础。其核心思想是将一次前向或者后向上的观测对尽可能多的目标进行观测,而可以观测的范围取决于抽象后的链条的长度,将输入的目标根据相邻关系进行不同链条得组合,以姿态的机动能力作为约束进行链条长度的优化,并由少及多地进行无用目标点的删除,再逐一评估链条间的联通性,进行较短间隔的链条相连。
[0091]
本实施例对以不同的机动能力设置了不同数量的待观测目标场景进行仿真,以提出观测目标数量与机动能力对本方法形成观测路径的影响。如图5(a)~(d)所示,在场景一中(低速机动任务规划),设置沿星下点航迹两侧500km内随机分布的30个目标。以低速姿态机动为假设场景,分别对姿态机动能力1
°
/s,2
°
/s,3
°
/s,4
°
/s输入下对目标进行了观测序列路径的规划,规划结果分别对应图5(a)~(d)。
[0092]
如图6(a)~(d)所示,在场景二中(高速机动任务规划),设置沿星下点航迹两侧800km内随机分布的100个目标。以高速姿态机动为假设场景,分别对姿态机动能力5
°
/s,6
°
/s,7
°
/s,8
°
/s输入下对目标进行了观测序列路径的规划,规划结果分别对应图6(a)~(d)。发明人发现,在随机的单次仿真中发现链条的长度与组合在不同的场景下如选择单一的长度标准和连接原则会造成一些较佳链条的未选择,因此采用打靶的方法对不同的链条选择原则进行了优化。
[0093]
如图7所示,经过打靶分析,在驻留时间较短的场景下前向和后向链条长度接近的组合方式可以获得较好的观测数量,随着观测时间的增加,后向链条的长度增加有助于调高观测效能,效果在增加3个至5个目标时最为明显。前向链条的长度在6个至9个目标,后向链条的长度在7个至13个目标之间组合可以获得较好的组合收益。
[0094]
本实施例对以不同的观测时间的待观测目标场景进行仿真,以提出观测时间对链条观测能力的影响,如图8所示,对于不同凝视时间下的链条长度的置信度进行分析,30个目标的数据在85%的置信区间下链条长度为7个至8个目标,40个目标的数据在85%的置信区间下链条长度为8个至10个目标,50个目标的数据在85%的置信区间下链条长度为9个至11个目标。
[0095]
本实施例通过不同目标分布、卫星姿态机动能力情况下的蒙特卡洛打靶仿真,分析得到了不同任务输入下的链条选择策略,方法有效,观测收益高,计算开销小,可应用于敏捷卫星面向大量点目标的在轨自主任务规划应用。
[0096]
本发明从工程应用出发,针对具备两个轴向自由度的敏捷遥感卫星,在一次过境对多目标的观测,提出了一种以其姿态机动能力为约束的前后向链条优化组合方法;建立了问题模型与目标函数,并完成了前后向链条优化组合方法的算法设计。经过仿真表明算法有效,可以以在轨条件实现实时的观测路径规划。同时如果不针对目标数量进行优化,任务规划方法会出现一些较佳链条的未选择。发明人因此对链条长度进行优化,得出了特定场景下的先后向链条长度的选择区间。最后考虑了在不同凝视情况下对链条长度的选择影响情况。综上,前后向链条优化组合方法有效,计算开销小,可应用于敏捷卫星面向大量点目标的在轨自主任务规划应用。未来工作中,需要在链条针对目标分布的自适应选择方面开展进一步的研究。
[0097]
综上,上述实施例对敏捷遥感卫星多目标在轨观测方法的不同构型进行了详细说明,当然,本发明包括但不局限于上述实施中所列举的构型,任何在上述实施例提供的构型基础上进行变换的内容,均属于本发明所保护的范围。本领域技术人员可以根据上述实施例的内容举一反三。
[0098]
上述描述仅是对本发明较佳实施例的描述,并非对本发明范围的任何限定,本发明领域的普通技术人员根据上述揭示内容做的任何变更、修饰,均属于权利要求书的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。