1.本发明涉及无人机技术领域,具体涉及一种多约束条件下的四旋翼无人机。
背景技术:
2.无人驾驶飞机简称无人机,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,无人机按照应用的领域,可大致分为军用与民用两类。而在实际使用中,四旋翼无人机具备快速机动反应、最佳侦察监视视角、低廉成本等优点,被广泛运用于执行信息收集、巡逻和搜索监视等任务,而在四旋翼无人机使用时,需要考虑无人机的大小、重量与飞行的高度与速度等,同时还要考虑风速等自然环境因素,以确保无人机可以顺利执行信息收集等任务。
3.现有的多约束条件下的四旋翼无人机在使用时,为了避免无人机停降时无人机上的摄像头损坏,通常会将摄像头设置在无人机的支架之间,且摄像头的长度小于支架的长度,这样使得摄像头在朝向支架时,支架容易挡住摄像头的拍摄角度,从而使得摄像头只能向无人机前飞与倒飞时的方向拍摄,而在对无人机飞行航线一侧进行拍摄时,只能使无人机侧飞,由于无人机航向与摄像头之间成一定角度,使得无人机的控制飞行较为麻烦,使用较为不便。
技术实现要素:
4.为了克服上述的技术问题,本发明的目的在于提供一种多约束条件下的四旋翼无人机,通过圆杆一端与导轨内侧面滑动连接,驱动机构可以带动导轨转动,这时在导轨的作用下,可以使圆杆带动摄像机构向下移动,使摄像机构底部伸出两个支架之间,这样支架不会挡住摄像机构的拍摄,可以使无人机沿航线前飞,然后通过调整摄像机构的拍摄角度来拍摄航线的两侧,控制无人机飞行较为简单,使用较为方便。
5.本发明的目的可以通过以下技术方案实现:一种多约束条件下的四旋翼无人机,包括机体,所述机体底面两侧均固定连接有支架,所述机体底面固定连接有摄像模块,所述摄像模块包括外壳,所述外壳顶面与机体底面固定连接,所述外壳内顶面固定连接有固定框,所述固定框外侧壁顶部转动连接有齿环,所述外壳顶面固定连接有与齿环传动连接的驱动机构,驱动机构可以带动齿环转动,所述齿环底面固定连接有四个定位块,四个所述定位块底面固定连接有导轨,齿环可以通过定位块带动导轨转动,同时定位块可以对导轨进行支撑,所述固定框内侧面滑动连接有滑动块,所述滑动块底面设置有摄像机构,所述滑动块顶面固定连接有两个连接块,两个所述连接块侧面顶部固定连接有圆杆,所述固定框侧壁两侧均开设有与圆杆滑动连接的滑动槽,且圆杆一端穿过滑动槽与导轨内侧面滑动连接,驱动机构可以通过齿环带动导轨转动,导轨转动时,在导轨底部弧型内侧面的作用下,可以使圆杆沿滑动槽向下移动,这样可以使滑动块带动摄像机构向下移动,从而使摄像机构底端可以伸出两个支架之间,这样支架不会挡住摄像机构的拍摄,在无人机沿航线前飞时,可以调整摄像机构的拍摄角度来拍摄航线
的两侧,控制无人机飞行较为简单,且在飞行时,需要对不同方向上的物体进行拍摄时,只需根据画面调整拍摄角度,而不需要调整飞行方向,方便使用。
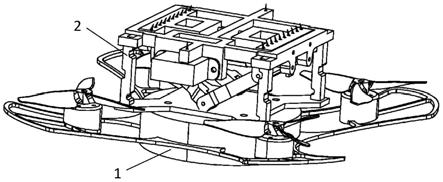
6.进一步在于:所述外壳内侧面底部转动连接有遮挡机构,所述遮挡机构包括两个相互接触的遮挡壳一,所述遮挡壳一外侧壁两侧顶部均固定连接有与外壳内侧壁转动连接的转动杆,所述转动杆侧面固定套接有齿轮一,所述外壳内侧面两侧均固定连接有与相邻两个齿轮一传动连接的传动机构,且传动机构与导轨传动连接,导轨转动时,可以通过传动机构使齿轮一转动,从而使两个遮挡壳一打开或闭合,两个所述遮挡壳一外侧壁相背的一侧均设置有遮挡壳二,所述遮挡壳二两端均与相邻转动杆转动连接,遮挡壳一与遮挡壳二可以对摄像机构进行保护,避免无人机停降在山区等底面崎岖不平的地面时,地面凸出的部分与摄像机构磕碰造成摄像机构损坏,同时可以在无人机坠毁时对摄像机构进行保护,所述遮挡壳一外侧壁底部固定连接有与相邻遮挡壳二外侧壁接触的弧型框,在遮挡壳一打开时,遮挡壳一可以通过弧型框带动遮挡壳二转动,使遮挡壳二打开,所述外壳内侧面底部两侧均固定连接有与相邻遮挡壳二侧面接触的两个挡块,在遮挡壳一与遮挡壳二合闭时,挡块可以挡住遮挡壳二的位置,避免遮挡壳二向下转动,从而使遮挡壳一与遮挡壳二错开,使遮挡壳一与遮挡壳二完全挡住外壳底部。
7.进一步在于:所述传动机构包括连接环,所述连接环内侧面固定连接有与导轨顶端内侧面滑动连接圆块,所述连接环外侧面两侧均固定连接有横杆,所述横杆底面背离连接环的一端固定连接有齿条,且齿条与相邻两个齿轮一啮合传动,导轨转动时,在导轨顶部弧型内侧面的作用下,将会使圆块向下移动,从而使连接环通过横杆带动齿条向下移动,齿条可以通过齿轮一带动转动杆转动,从而带动两个遮挡壳一相背向上转动,遮挡壳一可以通过弧型框带动遮挡壳二向上转动,从而打开遮挡壳一与遮挡壳二,然后导轨底部弧型内侧面才会与圆杆接触,使摄像机构向下移动,打开遮挡壳一与遮挡壳二的操作较为简单,方便使用,所述齿条侧面滑动连接有与外壳内侧面固定连接的限位块,限位块可以限制齿条的移动方向。
8.进一步在于:所述遮挡壳二外侧壁底部固定连接有与弧型框内侧面接触的固定块,在两个遮挡壳一合围后,弧型框可以限制固定块的位置,避免遮挡壳二向上转动,这样在无人机坠落或运输时,可以保证遮挡壳二不会打开,便于使用。
9.进一步在于:所述驱动机构包括固定壳,所述固定壳内底面固定连接有电机,所述电机输出端与固定壳顶面转动连接,且电机输出端固定套接有齿轮二,所述固定壳内侧面转动连接有传动杆,所述传动杆侧壁固定套接有与齿轮二啮合传动的齿轮三,且齿轮三与齿环啮合传动,电机可以带动齿轮二转动,齿轮二可以通过齿轮三带动齿环转动。
10.进一步在于:所述固定框外侧壁顶部固定连接有与齿环内侧面转动连接的限位环,限位环可以限制齿环的位置。
11.进一步在于:所述摄像机构包括固定座,所述固定座顶面与滑动块转动连接,且固定座侧壁与固定框内侧面滑动连接,所述滑动块内部设置有动力机构一,所述动力机构一输出端与固定座顶面传动连接,所述固定座底面固定连接有连接座,所述连接座内侧面转动连接有摄像头,所述连接座内部设置有动力机构二,所述动力机构二输出端与摄像头侧壁传动连接,可以通过动力机构一带动固定座转动,并通过动力机构二带动摄像头转动,这样可以调整摄像头的拍摄角度,使摄像头对无人机航线的一侧进行拍摄。
12.进一步在于:所述圆杆两端均固定连接有与固定框外侧壁滑动连接的限位片,限位片可以限制圆杆的移动方向。
13.本发明的有益效果:1、通过圆杆一端与导轨内侧面滑动连接,驱动机构可以带动齿环转动,从而使导轨转动,导轨转动时,在导轨的作用下,可以使圆杆沿滑动槽向下移动,这样可以使滑动块带动摄像机构向下移动,从而使摄像机构底端可以伸出两个支架之间,在将摄像机构朝向一侧支架时,支架不会挡住摄像机构的拍摄,这样可以直接使无人机沿航线前飞,然后通过调整摄像机构的拍摄角度来拍摄航线的两侧,控制无人机飞行较为简单,且在飞行时,需要对不同方向上的物体进行拍摄时,只需根据画面调整拍摄角度,而不需要调整飞行方向,方便使用;2、通过导轨顶端内侧面与圆块滑动连接,遮挡壳一与遮挡壳二合围后可以对摄像机构进行保护,避免无人机停降在山区等底面崎岖不平的地面时,地面凸出的部分与摄像机构磕碰造成摄像机构损坏,同时可以在无人机坠毁时对摄像机构进行保护,而在导轨转动时,将圆块将先会沿导轨顶部弧型内侧面向下移动,从而使齿条向下移动,使遮挡壳一与遮挡壳二打开,然后导轨底部弧型内侧面才会与圆杆接触,使摄像机构向下移动,打开遮挡壳一与遮挡壳二的操作较为简单,方便使用。
附图说明
14.下面结合附图对本发明作进一步的说明;图1是本发明一种多约束条件下的四旋翼无人机整体结构示意图;图2是本发明中的摄像模块正视图;图3是本发明中的遮挡机构与传动机构结构示意图;图4是本发明中的遮挡机构底部结构示意图;图5是本发明中的固定框结构示意图;图6是本发明中的固定框内部正视图;图7是本发明中的固定框内部结构示意图;图8是本发明中的齿环结构示意图;图9是本发明中的驱动机构结构示意图;图中:100、机体;110、支架;200、摄像模块;210、外壳;211、挡块;220、遮挡机构;221、遮挡壳一;222、遮挡壳二;223、转动杆;224、齿轮一;225、固定块;226、弧型框;230、传动机构;231、连接环;232、圆块;233、齿条;234、限位块;235、横杆;240、齿环;241、导轨;242、定位块;250、固定框;251、滑动槽;252、限位环;260、驱动机构;261、固定壳;262、电机;263、齿轮二;264、齿轮三;265、传动杆;270、摄像机构;271、固定座;272、连接座;273、摄像头;280、滑动块;281、连接块;282、圆杆;283、限位片。
具体实施方式
15.下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都
属于本发明保护的范围。
16.请参阅图1
‑
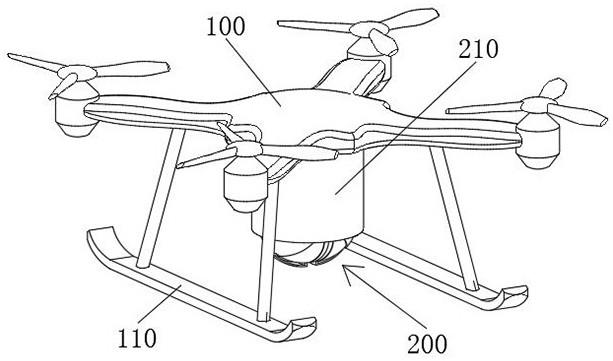
9所示,一种多约束条件下的四旋翼无人机,包括机体100,机体100底面两侧均固定连接有支架110,机体100底面固定连接有摄像模块200,摄像模块200包括外壳210,外壳210顶面与机体100底面固定连接,外壳210内顶面固定连接有固定框250,固定框250外侧壁顶部转动连接有齿环240,外壳210顶面固定连接有与齿环240传动连接的驱动机构260,驱动机构260可以带动齿环240转动,齿环240底面固定连接有四个定位块242,四个定位块242底面固定连接有导轨241,齿环240可以通过定位块242带动导轨241转动,同时定位块242可以对导轨241进行支撑,固定框250内侧面滑动连接有滑动块280,滑动块280底面设置有摄像机构270,滑动块280顶面固定连接有两个连接块281,两个连接块281侧面顶部固定连接有圆杆282,固定框250侧壁两侧均开设有与圆杆282滑动连接的滑动槽251,且圆杆282一端穿过滑动槽251与导轨241内侧面滑动连接,驱动机构260可以通过齿环240带动导轨241转动,导轨241转动时,在导轨241底部弧型内侧面的作用下,可以使圆杆282沿滑动槽251向下移动,这样可以使滑动块280带动摄像机构270向下移动,从而使摄像机构270底端可以伸出两个支架110之间,这样支架110不会挡住摄像机构270的拍摄,在无人机沿航线前飞时,可以调整摄像机构270的拍摄角度来拍摄航线的两侧,控制无人机飞行较为简单,且在飞行时,需要对不同方向上的物体进行拍摄时,只需根据画面调整拍摄角度,而不需要调整飞行方向,方便使用。
17.外壳210内侧面底部转动连接有遮挡机构220,遮挡机构220包括两个相互接触的遮挡壳一221,遮挡壳一221外侧壁两侧顶部均固定连接有与外壳210内侧壁转动连接的转动杆223,转动杆223侧面固定套接有齿轮一224,外壳210内侧面两侧均固定连接有与相邻两个齿轮一224传动连接的传动机构230,且传动机构230与导轨241传动连接,导轨241转动时,可以通过传动机构230使齿轮一224转动,从而使两个遮挡壳一221打开或闭合,两个遮挡壳一221外侧壁相背的一侧均设置有遮挡壳二222,遮挡壳二222两端均与相邻转动杆223转动连接,遮挡壳一221与遮挡壳二222可以对摄像机构270进行保护,避免无人机停降在山区等底面崎岖不平的地面时,地面凸出的部分与摄像机构270磕碰造成摄像机构270损坏,同时可以在无人机坠毁时对摄像机构270进行保护,遮挡壳一221外侧壁底部固定连接有与相邻遮挡壳二222外侧壁接触的弧型框226,在遮挡壳一221打开时,遮挡壳一221可以通过弧型框226带动遮挡壳二222转动,使遮挡壳二222打开,外壳210内侧面底部两侧均固定连接有与相邻遮挡壳二222侧面接触的两个挡块211,在遮挡壳一221与遮挡壳二222合闭时,挡块211可以挡住遮挡壳二222的位置,避免遮挡壳二222向下转动,从而使遮挡壳一221与遮挡壳二222错开,使遮挡壳一221与遮挡壳二222完全挡住外壳210底部。
18.传动机构230包括连接环231,连接环231内侧面固定连接有与导轨241顶端内侧面滑动连接圆块232,连接环231外侧面两侧均固定连接有横杆235,横杆235底面背离连接环231的一端固定连接有齿条233,且齿条233与相邻两个齿轮一224啮合传动,导轨241转动时,在导轨241顶部弧型内侧面的作用下,将会使圆块232向下移动,从而使连接环231通过横杆235带动齿条233向下移动,齿条233可以通过齿轮一224带动转动杆223转动,从而带动两个遮挡壳一221相背向上转动,遮挡壳一221可以通过弧型框226带动遮挡壳二222向上转动,从而打开遮挡壳一221与遮挡壳二222,然后导轨241底部弧型内侧面才会与圆杆282接触,使摄像机构270向下移动,打开遮挡壳一221与遮挡壳二222的操作较为简单,方便使用,
齿条233侧面滑动连接有与外壳210内侧面固定连接的限位块234,限位块234可以限制齿条233的移动方向。遮挡壳二222外侧壁底部固定连接有与弧型框226内侧面接触的固定块225,在两个遮挡壳一221合围后,弧型框226可以限制固定块225的位置,避免遮挡壳二222向上转动,这样在无人机坠落或运输时,可以保证遮挡壳二222不会打开,便于使用。
19.驱动机构260包括固定壳261,固定壳261内底面固定连接有电机262,电机262输出端与固定壳261顶面转动连接,且电机262输出端固定套接有齿轮二263,固定壳261内侧面转动连接有传动杆265,传动杆265侧壁固定套接有与齿轮二263啮合传动的齿轮三264,且齿轮三264与齿环240啮合传动,电机262可以带动齿轮二263转动,齿轮二263可以通过齿轮三264带动齿环240转动。固定框250外侧壁顶部固定连接有与齿环240内侧面转动连接的限位环252,限位环252可以限制齿环240的位置。
20.摄像机构270包括固定座271,固定座271顶面与滑动块280转动连接,且固定座271侧壁与固定框250内侧面滑动连接,滑动块280内部设置有动力机构一,动力机构一输出端与固定座271顶面传动连接,固定座271底面固定连接有连接座272,连接座272内侧面转动连接有摄像头273,连接座272内部设置有动力机构二,动力机构二输出端与摄像头273侧壁传动连接,其中动力结构一与动力机构二均为现有技术中常见的旋转电机或者能够实现转动效果的机构,可以通过动力机构一带动固定座271转动,并通过动力机构二带动摄像头273转动,这样可以调整摄像头273的拍摄角度,使摄像头273对无人机航线的一侧进行拍摄。圆杆282两端均固定连接有与固定框250外侧壁滑动连接的限位片283,限位片283可以限制圆杆282的移动方向。
21.工作原理:使用时,通过遥控器控制机体100起飞后,可以通过遥控器控制电机262启动,电机262可以通过齿轮二263与齿轮三264带动齿环240转动,齿环240可以通过定位块242带动导轨241转动,导轨241转动时,在导轨241顶部弧型内侧面的作用下,将会使圆块232向下移动,从而使连接环231通过横杆235带动齿条233沿限位块234向下移动,齿条233可以通过齿轮一224带动转动杆223转动,从而带动两个遮挡壳一221相背向上转动,在弧型框226底端内侧面与遮挡壳二222接触时,遮挡壳一221可以通过弧型框226带动遮挡壳二222向上转动,从而打开遮挡壳一221与遮挡壳二222。
22.在圆块232沿导轨241顶部的弧型内侧面向下移动时,圆杆282将始终与导轨241中部与水平面平行的内侧面接触,这样导轨241转动时,将不会使圆杆282向下移动,在遮挡壳一221与遮挡壳二222完全打开后,导轨241中部的水平内侧面将会与圆块232接触,这时导轨241继续转动时将不会带动圆块232向下移动,并使圆块232的高度保持不变,从而使遮挡壳一221与遮挡壳二222保持打开的状态,且这时圆杆282将会与导轨241底部的弧型内侧面接触,导轨241继续转动时,在导轨241底部的弧型内侧面的作用下,可以使圆杆282沿滑动槽251向下移动,圆杆282可以通过连接块281带动滑动块280向下移动,滑动块280可以带动摄像机构270向下移动,使摄像头273底部的镜头伸出两个支架110之间。
23.摄像机构270下降完成后,可以通过摄像头273进行拍摄,同时可以通过动力机构一带动固定座271转动,并通过动力机构二带动摄像头273转动,这样可以调整摄像头273的拍摄角度,使摄像头273对无人机航线的一侧进行拍摄。
24.拍摄结束后,在对无人机进行停降前,可以启动电机262,使电机262通过齿轮二263与齿轮三264带动齿环240反向转动,这样可以使圆杆282在导轨241底部弧型内侧面的
作用下向上移动,从而带动摄像机构270移动到外壳210内部,然后圆杆282可以与导轨241中部的水平内侧面接触,使圆杆282保持位置不变,从而使摄像机构270的位置保持不变,这时圆块232将会与导轨241顶部的弧型内侧面接触,导轨241转动时,可以使圆块232沿导轨241顶部的弧型内侧面向上移动,使齿条233沿限位块234向上移动,齿条233可以通过齿轮一224与转动杆223带动遮挡壳一221向下转动,同时遮挡壳二222在自身重力的作用下,可以向下移动,在两个遮挡壳一221合围后,停止电机262,这时遮挡壳二222可以被挡块211挡住,使遮挡壳二222不会向下转动,这样遮挡壳二222可以与遮挡壳一221一起挡住摄像头273,然后可以将无人机停降。
25.在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
26.以上内容仅仅是对本发明所作的举例和说明,所属本技术领域的技术人员对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离发明或者超越本权利要求书所定义的范围,均应属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。