技术特征:
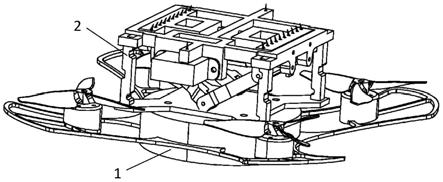
1.一种多约束条件下的四旋翼无人机,其特征在于,包括机体(100),所述机体(100)底面两侧均固定连接有支架(110),所述机体(100)底面固定连接有摄像模块(200),所述摄像模块(200)包括外壳(210),所述外壳(210)顶面与机体(100)底面固定连接,所述外壳(210)内顶面固定连接有固定框(250),所述固定框(250)外侧壁顶部转动连接有齿环(240),所述外壳(210)顶面固定连接有与齿环(240)传动连接的驱动机构(260),所述齿环(240)底面固定连接有四个定位块(242),四个所述定位块(242)底面固定连接有导轨(241),所述固定框(250)内侧面滑动连接有滑动块(280),所述滑动块(280)底面设置有摄像机构(270),所述滑动块(280)顶面固定连接有两个连接块(281),两个所述连接块(281)侧面顶部固定连接有圆杆(282),所述固定框(250)侧壁两侧均开设有与圆杆(282)滑动连接的滑动槽(251),且圆杆(282)一端穿过滑动槽(251)与导轨(241)内侧面滑动连接。2.根据权利要求1所述的一种多约束条件下的四旋翼无人机,其特征在于,所述外壳(210)内侧面底部转动连接有遮挡机构(220),所述遮挡机构(220)包括两个相互接触的遮挡壳一(221),所述遮挡壳一(221)外侧壁两侧顶部均固定连接有与外壳(210)内侧壁转动连接的转动杆(223),所述转动杆(223)侧面固定套接有齿轮一(224),所述外壳(210)内侧面两侧均固定连接有与相邻两个齿轮一(224)传动连接的传动机构(230),且传动机构(230)与导轨(241)传动连接,两个所述遮挡壳一(221)外侧壁相背的一侧均设置有遮挡壳二(222),所述遮挡壳二(222)两端均与相邻转动杆(223)转动连接,所述遮挡壳一(221)外侧壁底部固定连接有与相邻遮挡壳二(222)外侧壁接触的弧型框(226),所述外壳(210)内侧面底部两侧均固定连接有与相邻遮挡壳二(222)侧面接触的两个挡块(211)。3.根据权利要求2所述的一种多约束条件下的四旋翼无人机,其特征在于,所述传动机构(230)包括连接环(231),所述连接环(231)内侧面固定连接有与导轨(241)顶端内侧面滑动连接圆块(232),所述连接环(231)外侧面两侧均固定连接有横杆(235),所述横杆(235)底面背离连接环(231)的一端固定连接有齿条(233),且齿条(233)与相邻两个齿轮一(224)啮合传动,所述齿条(233)侧面滑动连接有与外壳(210)内侧面固定连接的限位块(234)。4.根据权利要求2所述的一种多约束条件下的四旋翼无人机,其特征在于,所述遮挡壳二(222)外侧壁底部固定连接有与弧型框(226)内侧面接触的固定块(225)。5.根据权利要求1所述的一种多约束条件下的四旋翼无人机,其特征在于,所述驱动机构(260)包括固定壳(261),所述固定壳(261)内底面固定连接有电机(262),所述电机(262)输出端与固定壳(261)顶面转动连接,且电机(262)输出端固定套接有齿轮二(263),所述固定壳(261)内侧面转动连接有传动杆(265),所述传动杆(265)侧壁固定套接有与齿轮二(263)啮合传动的齿轮三(264),且齿轮三(264)与齿环(240)啮合传动。6.根据权利要求1所述的一种多约束条件下的四旋翼无人机,其特征在于,所述固定框(250)外侧壁顶部固定连接有与齿环(240)内侧面转动连接的限位环(252)。7.根据权利要求1所述的一种多约束条件下的四旋翼无人机,其特征在于,所述摄像机构(270)包括固定座(271),所述固定座(271)顶面与滑动块(280)转动连接,且固定座(271)侧壁与固定框(250)内侧面滑动连接,所述滑动块(280)内部设置有动力机构一,所述动力机构一输出端与固定座(271)顶面传动连接,所述固定座(271)底面固定连接有连接座(272),所述连接座(272)内侧面转动连接有摄像头(273),所述连接座(272)内部设置有动力机构二,所述动力机构二输出端与摄像头(273)侧壁传动连接。
8.根据权利要求1所述的一种多约束条件下的四旋翼无人机,其特征在于,所述圆杆(282)两端均固定连接有与固定框(250)外侧壁滑动连接的限位片(283)。
技术总结
本发明公开了一种多约束条件下的四旋翼无人机,包括机体,所述机体底面两侧均固定连接有支架,所述机体底面固定连接有摄像模块,所述摄像模块包括外壳,所述外壳顶面与机体底面固定连接,所述外壳内顶面固定连接有固定框,所述固定框外侧壁顶部转动连接有齿环。本发明的优点在于通过圆杆一端与导轨内侧面滑动连接,驱动机构可以带动导轨转动,这时在导轨的作用下,可以使圆杆带动摄像机构向下移动,使摄像机构底部伸出两个支架之间,这样支架不会挡住摄像机构的拍摄,可以使无人机沿航线前飞,然后通过调整摄像机构的拍摄角度来拍摄航线的两侧,控制无人机飞行较为简单,使用较为方便。较为方便。较为方便。
技术研发人员:夏昊天 严婷婷 许鹏鹏 季肖枫 杨俊 杜虹 段健 杨硕 范星亮 曾庆雨 杨照 杨力涛
受保护的技术使用者:江苏航运职业技术学院
技术研发日:2021.09.24
技术公布日:2021/11/8
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。