技术特征:
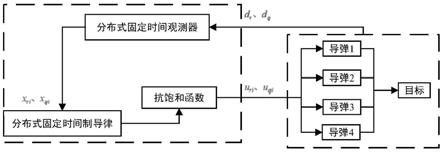
1.一种攻击高机动目标的抗饱和固定时间协同制导律,其特征在于,包括以下步骤:步骤1,建立导弹与目标的运动几何数学模型,转入步骤2;步骤2,根据导弹与目标的运动几何数学模型,设计分布式扩张状态固定时间观测器,转入步骤3;步骤3,根据分布式扩张状态观测器所观测到的加速度值以及导弹与目标的运动几何数学模型,设计分布式抗饱和协同制导律,转入步骤4;步骤4,运用双极限齐次定理和李雅普诺夫方程进行稳定性证明,引入固定时间理论得到协同制导系统的固定时间稳定的结果。2.根据权利要求1所述的攻击高机动目标的抗饱和固定时间协同制导律,其特征在于,步骤1中建立导弹与目标的运动几何数学模型,具体如下:步骤1.1、考虑多个导弹协同攻击一个高机动目标的场景,根据导弹和目标的动力学模型,推导出导弹与目标的相对运动方程为:型,推导出导弹与目标的相对运动方程为:η
t
=q
i
‑
θ
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)η
i
=q
i
‑
θ
i
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)(4)式中:r
i
为第i枚导弹与目标的相对距离,为第i枚导弹与目标的相对速度;q
i
为第i枚导弹的视线方向角,为第i枚导弹的视线方向角的角速度;v
i
为第i枚导弹在视线方向的速度,v
t
为目标在视线方向的速度;θ
i
为第i枚导弹的弹道倾角,为第i枚导弹的弹道倾角的角速度,θ
t
为目标弹道倾角,为目标弹道倾角的角速度;a
i
为第i枚导弹的法向加速度,a
t
为目标的法向加速度;η
i
为第i枚导弹的前置角,η
t
为目标的前置角;对式(1)和式(2)求导,整理后得:式中:第i枚导弹的加速度在视线方向的输入u
ri
,目标的加速度在视线方向的分量d
r
;第i枚导弹的法向角速度在视线法线方向的输入u
qi
,目标的法向角速度在视线法线方向的分量d
q
;步骤1.2、设中间参量分别为x
1i
、x
2i
、x
3i
、x
4i
,令x
1i
=r
i
,x
3i
=q
i
‑
q0,q0表示理想视线方向角度,得导弹与攻击目标的相对移动模型,即导弹与目标的运动几何数学模型:
假设1:由于目标驱动力的限制,其任务目标的移动加速度在一个合理的区间内,所以d
r
和d
q
应该是有界且符合lipschitz条件的。3.根据权利要求1或2所述的攻击高机动目标的抗饱和固定时间协同制导律,其特征在于,步骤2,根据导弹与目标的运动几何数学模型,设计分布式扩张状态固定时间观测器,具体如下:由于高机动目标运动目标的加速度往往是不可测的,根据导弹与目标的运动几何数学模型设计视线角方向的分布式固定时间观测器如下:式中是x
1i
的估计值,是的导数,是x
2i
的估计值,是的导数,是d
r
的估计值,是的导数;定义观测器误差分别选取了κ1,κ2和κ3作为观测器的系数,κ1=3w0,w0为增益带宽;其中中间函数sig(
·
)
α
=sign(
·
)|
·
|
α
,α为指数系数;α1、β1、α2、β2、α3、β3均为观测器的指数,选择如下α1∈(2/3,1),β1∈(1,4/3)且令α2∈2α1‑
1,α3∈3α1‑
2;β2∈2β1‑
1,β3∈3β2‑
2;结合式(8)和式(9),记观测器误差状态空间方程为:其中,中间变量中间变量根据假设1,一定存在一个正常数δ
max
使得|d
r
|≤δ
max
;在上述观测器的作用下,e
1i
,e
2i
和e
ri
在固定时间t
i
,i=1,...,n以内收敛至零,推导出e
1,i
=e
2,i
=e
r,i
=0,i=1,...,n;n为导弹数量。4.根据权利要求3所述的攻击高机动目标的抗饱和固定时间协同制导律,其特征在于:对于视线法线方向的分布式固定时间观测器设计采取与视线角方向相同的设计原则,视线法线方向的分布式固定时间观测器为:
式中是x
3i
的估计值,是的导数,是x
4i
的估计值,是的导数,是d
q
的估计值,是的导数;定义观测器误差5.根据权利要求4所述的攻击高机动目标的抗饱和固定时间协同制导律,其特征在于:步骤3中根据分布式扩张状态观测器所观测到的加速度值以及导弹与目标的运动几何数学模型,设计分布式抗饱和协同制导律,具体如下:步骤3.1、设计视线角方向的分布式抗饱和协同制导律,视线角方向的制导模型为:为了令每一枚导弹的距离目标的相对距离和速度均一致,引入以下变量表征协同性误差:式中,a
ij
表示通信参数,如果有信息从第i枚导弹流向第j枚导弹则a
ij
为1,否则为0;x
1j
表示第j枚导弹与目标的相对距离,x
2j
表示第j枚导弹与目标的相对速度,v
1i
表示第i枚导弹与第j枚导弹距离目标的距离差值,v
2i
表示第i枚导弹i与第j枚导弹距离目标的当前视线角速度差值,即当v
1i
和v
2i
均趋近于0时,则视为第i枚导弹与第j枚导弹的飞行状态一致,即最后攻击目标时能够实现共同打击;考虑式(12),设计基于固定时间理论和双极限齐次定理的一致性制导律为:其中,扰动估计量是d
r
的估计值,σ1、σ'1、σ2、σ'2均为一致性制导律指数,k1、k2、k'1、k'2为一致性制导律增益且满足:其中,x
1max
表示第i枚导弹与目标的相对距离的最大值;x
4max
表示第i枚导弹的视线方向角的角速度,u
rmax
表示导弹的加速度在视线方向的分量的最大值;对于任意u
rmax
>0且满足:1)对于所有i=1,2,...,n都有|u
ri
|≤u
rmax
;2)对于式(12)的协同制导律一致性能够在固定时间内完成,其时间上限t
s
为:式中t
n
为的收敛时间,k
v
、k0、k
∞
、γ1、γ2、d
v0
、d
v∞
、σ设计如下:
k
v
、k0、k
∞
、γ1、γ2、σ均为收敛参数;步骤3.2、对于视线角法线方向的协同制导律采取与视线角方向相同的设计原则,视线角法向方向的制导模型为:为了保证视线角与理想视线角的夹角趋近于0,设计每一枚导弹的视线角法向设计加速度,使得按照每一枚导弹按照预设攻击角度进行攻击,在此基础上,设计视线角方向协同制导律为:其中σ3、σ'3、σ4、σ'4为一致性制导律指数,k3、k4、k'3、k'4为一致性制导律增益且满足:(k3 k'3 k4 k'4) δ
max
2x
2max
x
4max
≤u
qmax
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(20)其中,x
2max
表示第i枚导弹与目标的相对速度的最大值;u
qmax
表示导弹的加速度在视线方向法线的分量的最大值,其证明过程的方式也同样采用视线角方向的证明方式。6.根据权利要求5所述的攻击高机动目标的抗饱和固定时间协同制导律,其特征在于,步骤4中运用双极限齐次定理和李雅普诺夫方程进行稳定性证明,引入固定时间理论得到协同制导系统的固定时间稳定的结果,具体如下:由式(12)和式(14)所组成的协同制导系统为:式中i=1,...,n;继而令中间变量中间变量并且当扩张状态固定时间观测器的收敛至d
r
,上式写为:式中l是laplacian矩阵;且令中间变量中间变量中间向量i
n
是对应单特征值0的特征向量,中间变量推出:
有当且仅当x
11
=x
12
=
…
x
1n
和x
21
=x
22
=
…
x
2n
时,p=0和q=0;当且仅当p和q在固定时间收敛到零时,式(21)才能实现固定时间一致。
技术总结
本发明公开了一种攻击高机动目标的抗饱和固定时间协同制导律,运用分布式固定时间扩张状态观测器和抗饱和函数的方式设计了一种固定时间协同制导律。本发明是在以下的背景提出的:随着航空航天技术和复杂网络技术的飞速发展,多导弹协同作战的理念受到了越来越多的重视。相比于传统的单导弹作战方式,多导弹协同作战具有更大的优势,采用多点起爆的方式产生的爆炸聚集效应能够实现饱和式攻击的目的,拥有更高的毁伤效能。本发明所公开的协同制导律有效的解决了多导弹协同打击高机动目标的特点,并且设计了抗饱和函数使得整个系统的打击效能有了提升,获得了良好的制导性能。获得了良好的制导性能。获得了良好的制导性能。
技术研发人员:戴可人 马翔 商玮宸 于航 张合
受保护的技术使用者:南京理工大学
技术研发日:2021.06.29
技术公布日:2021/11/8
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。