1.本发明涉及软体机器人技术领域或者柔性驱动技术领域,特别涉及一种基于光磁驱动的复合水凝胶软体机器人。
背景技术:
2.软体机器人是一个新生领域,软体机器人模仿自然界的软体动物的外形结构或运动模式,很少甚至完全不采用传统硬质材料,由可承受大应变的橡胶、硅胶、形状记忆聚合物、水凝胶等柔软材料制成,刚度通常大约为104~109pa,与生物皮肤或肌肉组织相对应,可在大范围内改变自身的外形结构、或运动模式,以适应在多变复杂的非结构化环境中高效运动。
3.软体机器人作为一类新型连续体仿生机器人,但目前对于软体机器人的研究还处于起步阶段,目前软体机器人驱动方式通常包括形状记忆合金、气动式、介电弹性体、离子聚合物
‑
金属复合材料等。
4.现有技术公开了一种软体机器人,其由充磁系统及磁控多脚软体机器人本体构成,充磁系统包括电源装置、脉冲磁场发生装置和固定构建,该系统须对多脚软体机器人先进行整体轴向充磁,还须对局部径向充磁,从而控制机器人的运动步态,但由于其充磁过程较为复杂,对充磁精确性要求过高,难以做到精密控制。
5.现有技术公开了一种可视化janus结构色软体机器人及其制备方法。该软体机器人先将气液自组装策略生成碳基薄膜,再将碳基薄膜集成到柔性聚合物上,然后柔性碳基导体聚合物侧进行聚多巴胺处理,再沉积二维光子晶体阵列得到最终的可视化janus结构色软体机器人,其在近红外光驱动下可在35s时间弯曲90
°
,但其响应方式较为单一,难以多模式运动,且制备过程较为复杂。
6.现有技术公开了一种仿水母微型软体机器人,该软体机器人具有可变形的软肢结构,该结构由nipam/cnt构成,软肢结构的形状可随其承受光照的光强变化而改变,从而达到对微小物体的运输。但是该软体机器人的搬运过程是通过软肢夹取微小物体实现的,其效率较低,且无法承载物体对其定点搬运。
技术实现要素:
7.针对当前软体机器人驱动方式单一、难以精确控制、效率较低的问题,本发明提供了一种基于光磁驱动的复合水凝胶软体机器人,可实现任意方向上的自由度变化,能够完成更加复杂的姿态变换。相较于单层结构,本发明的三层结构能提高形态变换的稳定性、灵敏性以及功能性。
8.本发明是通过以下技术手段实现上述技术目的的。
9.一种基于光磁驱动的复合水凝胶软体机器人,包括可见光层、磁响应层和近红外光层;所述可见光层内填充光响应材料;所述磁响应层位于可见光层和近红外光层之间,所述磁响应层内填充磁响应材料;所述近红外光层内填充近红外光响应;
10.通过选择性的施加可见光场和匀强磁场,使可见光层和磁响应层产生形变,用于软体机器人产生蠕动变形;通过选择性的施加近红外光场和匀强磁场,使近红外光层和磁响应层产生形变,用于软体机器人产生扭转滚动。
11.进一步,所述可见光层为双网络交联温敏水凝胶,所述可见光层内填充可见光响应颗粒,通过对填充可见光响应颗粒的可见光层进行电编程处理,使可见光响应颗粒在可见光层内部线性排列。
12.进一步,线性排列的所述可见光响应颗粒在可见光层内部高度方向排布密集,宽度方向排布稀疏。
13.进一步,所述磁响应层为双网络交联温敏水凝胶,所述磁响应层内填充可见磁响应颗粒,通过对填充磁响应颗粒的磁响应层进行磁编程处理,使磁响应颗粒在磁响应层内部简谐式排布。
14.进一步,通过外力弯曲所述磁响应层,施加垂直与磁响应层弯曲中心的匀强磁场,使磁响应层内部的磁响应颗粒磁轴的方向按照弯曲曲率变化而改变。
15.进一步,所述近红外光层为双网络交联温敏水凝胶,所述磁响应层内填充近红外光响应颗粒和钛酸钡纳米片,通过对填充钛酸钡纳米片的红外光层进行电编程处理,使钛酸钡纳米片与近红外光层边缘的夹角呈锐角。
16.进一步,在所述近红外光层两端施加电场,使填充的钛酸钡纳米片表面与电场方向呈90
°
垂直排列,所述电场方向与近红外光层边缘的夹角呈钝角。
17.本发明的有益效果在于:
18.1.本发明所述的基于光磁驱动的复合水凝胶软体机器人,采用可见光层、磁响应层和近红外光层三层结构,在光场、磁场复合控制,形变效果更加多样。
19.2.本发明所述的基于光磁驱动的复合水凝胶软体机器人,可见光层、磁响应层和近红外光层三层结构之间地控制相互独立,互不干扰,最大限度地利用光磁复合作用。
20.3.本发明所述的基于光磁驱动的复合水凝胶软体机器人,可见光层下表面设有棘齿结构,利用弯曲变形时头部和尾部摩擦力不相等的特性使得机器人向顺棘齿方向运动,摆脱了导轨的限制。
21.4.本发明所述的基于光磁驱动的复合水凝胶软体机器人,利用光磁复合作用可以实现对微小物体的抓取与快速滚动搬运,能较好的适应狭窄空间及光滑的表面。
附图说明
22.图1为本发明所述的基于光磁驱动的复合水凝胶软体机器人结构示意图。
23.图2为本发明所述的可见光层结构示意图。
24.图3为本发明所述的磁响应层的磁编程示意图。
25.图4为本发明所述的磁编程后的磁响应层示意图。
26.图5为本发明所述的无电场取向的近红外光层示意图。
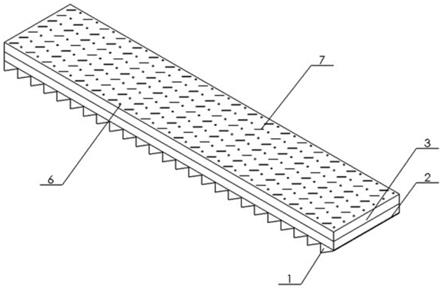
27.图6为本发明所述的经电场取向裁剪得到的最终近红外光层示意图。
28.图7为本发明实施例在磁场和可见光场的复合作用下蠕动爬行示意图。
29.图8为本发明实施例在磁场和近红外光场的复合作用下卷曲滚动行进示意图。
30.图中:
[0031]1‑
可见光层;2
‑
磁响应层;3
‑
近红外光层;4
‑
可见光响应颗粒;5
‑
磁响应颗粒;6
‑
近红外光响应颗粒;7
‑
钛酸钡纳米片;8
‑
棘齿。
具体实施方式
[0032]
下面结合附图以及具体实施例对本发明作进一步的说明,但本发明的保护范围并不限于此。
[0033]
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
[0034]
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“轴向”、“径向”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
[0035]
在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
[0036]
如图1所示,本发明所述的基于光磁驱动的复合水凝胶软体机器人,包括可见光层1、磁响应层2和近红外光层3;所述可见光层1、磁响应层2和近红外光层3均采用温敏单体n
‑
异丙基丙烯酰胺(nipam)和第二网络单体丙烯酸(aac)形成的纳米复合双网络水凝胶,因所述纳米复合双网络水凝胶具有自愈合功能,故所述三明治结构具有稳定可靠的特性。所述磁响应层2位于可见光层1和近红外光层3之间,可见光层1位于底层,磁响应层2位于中间层,近红外光层3位于顶层。所述可见光层1内填充光响应材料;所述磁响应层2内填充磁响应材料;所述近红外光层3内填充近红外光响应;通过选择性的施加可见光场和匀强磁场,使可见光层1和磁响应层2产生形变,用于软体机器人产生蠕动变形,具有蠕动爬行行为;通过选择性的施加近红外光场和匀强磁场,使近红外光层3和磁响应层2产生形变,用于软体机器人产生卷曲变形,可以卷运物体,具有扭转滚动行为。
[0037]
如图1所示,可见光层1底部具有棘齿8,棘齿8的齿高为2.5mm,棘齿8与水平面的夹角为30
°
。所述磁响应层2与近红外光层3层厚均为2.5mm。机器人整体尺寸为长100mm,宽20mm,厚7.5mm。
[0038]
如图2所示,所述可见光层1内填充可见光响应颗粒4,可见光响应颗粒4为碳纳米管或tio2或cu2o等纳米材料,通过对填充可见光响应颗粒4的可见光层1进行电编程处理,使可见光响应颗粒4在可见光层1内部线性排列。具体为:匀强电场沿可见光层1的长度方向水平穿过,使得可见光响应颗粒4排布方向与匀强电场方向平行。线性排列的所述可见光响应
颗粒4在可见光层1内部高度方向排布密集,宽度方向排布稀疏。
[0039]
如图3和图4所示,所述磁响应层2内填充磁响应颗粒5,所述磁响应颗粒5为钐铁氮、fe3o4、纳米fe粉。通过对填充磁响应颗粒5的磁响应层2进行磁编程处理,使磁响应颗粒5在磁响应层2内部简谐式排布。磁编程处理为:在外力作用下使磁响应层2弯曲300度,如图3所示,施加垂直与磁响应层2弯曲中心的匀强磁场,使磁响应层2内部的磁响应颗粒5磁轴的方向按照弯曲曲率变化而改变;经外力弯曲的所述磁响应层2在匀强磁场b中充分磁编程后撤去外力,磁响应层2内部填充的磁性颗粒5呈现简谐式排布方式,如图4所示。
[0040]
如图5和图6所示,所述磁响应层2内填充近红外光响应颗粒6和钛酸钡纳米片7,近红外光响应颗粒6为纳米金、菁类化合物、香豆素等,通过对填充钛酸钡纳米片7的红外光层3进行电编程处理,使钛酸钡纳米片7与近红外光层3边缘的夹角呈锐角。在所述近红外光层3两端施加电场,使填充的钛酸钡纳米片7表面与电场方向呈90
°
垂直排列,所述电场方向与近红外光层3边缘的夹角呈钝角。具体电编程处理如下,所述近红外光层3的尺寸为长90mm,宽90mm,厚2.5mm,在无水平匀强电场取向的情况下,所述近红外光层3中填充的近红外光响应颗粒6及钛酸钡纳米片7呈杂乱无章的排列,如图5所示。在所述近红外光层3两端施加水平匀强电场进行取向,使钛酸钡纳米片7表面与电场方向呈90
°
垂直排列,对取向过的所述近红外光层3进行裁剪,裁剪角度为45
°
。将裁剪后的近红外光层3旋转45度后固定在磁响应层2上,如图6所示。
[0041]
实施例1:
[0042]
如图7所示,本发明所述的基于光磁驱动的复合水凝胶软体机器人的蠕动爬行可实现在崎岖不平的表面行进。蠕动爬行动作分为两个过程,原地伸长阶段和铺展前进阶段,通过可见光的照射位置、强度以及磁场的强度对其进行调控。原地伸长阶段中,利用可见光对可见光层1进行来回周期扫描照射,使可见光层1周期式有规律地伸长。铺展前进阶段中,在机器人前进方向上设置水平匀强磁场,由于磁响应层2内部的磁性颗粒5沿长度方向简谐式排列,在匀强磁场作用下磁响应层2局部沿着磁性颗粒5取向方向会产生趋向力,最终在两种场强的配合作用下,机器人实现蠕动爬行行为。
[0043]
实施例2:
[0044]
如图8所示,本发明所述的基于光磁驱动的复合水凝胶软体机器人的扭转滚动可以用来快速卷运微小物体。相较于仿水母型的软体机器人,本发明的软体机器人在光磁复合作用下能够实现定点且快速地搬运微小物体,且光场与磁场二者缺一不可。卷运物体分为两个过程,原地卷曲包裹物体阶段和携物滚转前进阶段,通过近红外光的照射位置、强度以及磁场的强度对其进行调控。原地卷曲包裹物体阶段中,首先在实例1的基础上,所述软体机器人在可见光及磁场协同调控的基础上,蠕动爬行到微小物体上,利用近红外光对近红外光层3中部进行局部照射,温度升高进而提高钛酸钡纳米片7之间的静电斥力,使近红外光层3沿对角线向下卷曲对微小物体进行卷曲抓取。携物滚转前进阶段中,在机器人前进方向上设置水平匀强磁场,由于磁响应层2内部的磁性颗粒5沿长度方向简谐式排列,在匀强磁场作用下磁响应层2局部沿着磁性颗粒5取向方向会产生趋向力,最终在两种场强的配合作用下,机器人实现卷运物体的行为。在物体到达既定位置时,关闭近红外光和磁场作用,达到静止释放物体的目的。
[0045]
应当理解,虽然本说明书是按照各个实施例描述的,但并非每个实施例仅包含一
个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
[0046]
上文所列出的一系列的详细说明仅仅是针对本发明的可行性实施例的具体说明,它们并非用以限制本发明的保护范围,凡未脱离本发明技艺精神所作的等效实施例或变更均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。