1.本说明书中,公开了一种将半导体芯片接合并封装于基板晶片的封装装置。
背景技术:
2.自从前以来,已知有将半导体芯片接合至基板上来制造半导体装置的封装装置。近年来,提出了使用晶片作为基板的晶片上芯片方式的半导体装置。在制造晶片上芯片方式的半导体装置的封装装置中,设置有将半导体芯片接合至晶片的接合装置、以及向接合装置供给并自接合装置回收作为基板发挥功能的晶片(以下称为“基板晶片”)的晶片搬运装置。晶片搬运装置设置有用以在不与基板晶片的表面接触的情况下搬运晶片的搬运机器人、或者修正基板晶片的旋转角度的预对准器等。而且,晶片搬运装置在自载入端口(load port)取出基板晶片后,修正所述基板晶片的旋转角度,然后将所述基板晶片供给至接合装置。在接合装置中,若接合处理结束,则晶片搬运装置自接合装置回收处理后的基板晶片,且视需要在进行检查等之后,将所述基板晶片搬运至载入端口。
技术实现要素:
3.发明所要解决的问题
4.此处,为了提高半导体装置的生产能力,提出了设置多个所述封装装置。通过使多个封装装置并行运行,可提高生产能力。在设置多个封装装置的情况下,当然,不仅设置接合装置或芯片供给装置,而且也设置多个晶片搬运装置。但是,通常基板晶片的搬运或检查所需要的时间与接合处理所需要的时间相比,大幅度地变短。因此,晶片搬运装置与接合装置相比,不运行的待机时间多,浪费多。设置多个所述晶片搬运装置浪费了空间、费用。
5.因此,本说明书中,公开了一种可提高晶片上芯片方式的半导体装置的生产能力且也可抑制空间、费用的增加的封装装置。
6.解决问题的技术手段
7.本说明书中公开的封装装置的特征在于包括多个接合站、以及单个晶片搬运装置,所述多个接合站分别具有将半导体芯片接合至基板晶片的接合装置、以及向所述接合装置供给半导体芯片的芯片供给装置,所述单个晶片搬运装置为了对所述多个接合站各自供给所述基板晶片并自所述多个接合站各自回收所述基板晶片,而搬运所述基板晶片。
8.通过设为所述结构,可在多个接合站中共用一个晶片搬运装置,因此可提高生产能力且也可抑制空间、费用的增加。
9.另外,所述多个接合站各自的所述接合装置可与所述晶片搬运装置相邻配置,所述多个接合站各自的所述芯片供给装置隔着所述接合装置而配置于所述晶片搬运装置的相反侧。
10.通过设为所述结构,可在不横贯芯片供给装置的情况下供给、回收基板晶片。
11.另外,所述晶片搬运装置及所述多个接合站可彼此协作而形成一个腔室,所述晶片搬运装置可在不使所述基板晶片露出至所述腔室的外部的情况下自一个接合站搬运至
其他接合站。
12.通过设为所述结构,可防止基板晶片的污染,且在使基板晶片不收容于搬运用容器中的情况下在多个接合站之间简易地移动。
13.另外,所述多个接合站可包括第一接合站以及第二接合站,所述第二接合站隔着所述晶片搬运装置而配置于第一接合站的相反侧,所述第一接合站、所述晶片搬运装置及所述第二接合站排成一列配置。
14.通过设为所述结构,可减少死空间(dead space),因此可更有效地利用空间。
15.另外,封装装置可进而包括对处理后的基板晶片进行检查的单个所述检查装置,所述多个接合站共用所述单个检查装置。
16.通过设为所述结构,可防止检查装置的设置所需要的费用、空间的增加。
17.另外,所述晶片搬运装置可包括搬运所述基板晶片的单个搬运机器人、以及修正所述基板晶片的旋转角度的单个预对准器,在多个接合站中共用单个所述搬运机器人及单个所述预对准器。
18.另外,所述晶片搬运装置可具有能够同时保持两个所述基板晶片的搬运机器人,所述搬运机器人于在一个接合站中回收处理后的基板晶片后,可在不移动的情况下立即供给新的基板晶片。
19.通过设为所述结构,可进一步缩短基板晶片的供给、回收所需要的时间。
20.另外,所述多个接合站可包含第一接合站以及第二接合站,所述晶片搬运装置将自所述第一接合站回收的处理后的所述基板晶片供给至所述第二接合站。
21.通过设为所述结构,可对一个基板晶片串列实施不同的两种接合处理。
22.所述情况下,在所述第一接合站中,可执行将所述半导体芯片临时压接于所述基板晶片的临时压接处理,在所述第二接合站中,执行对所述临时压接的半导体芯片进行正式压接的正式压接处理。另外,在所述第一接合站中,可执行将第一半导体芯片接合至所述基板晶片的处理,在所述第二接合站中,执行在所述第一半导体芯片上接合与所述第一半导体芯片不同的第二半导体芯片的处理。
23.发明的效果
24.根据本说明书中公开的封装装置,可在多个接合站中共用一个晶片搬运装置,因此可提高生产能力且也可抑制空间、费用的增加。
附图说明
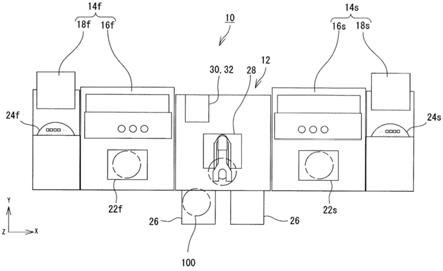
25.图1是封装装置的概略平面图。
26.图2是表示晶片搬运装置的结构的概略剖面图。
27.图3是搬运机器人的概略立体图。
28.图4是表示封装装置的另一布局例的图。
29.图5是表示封装装置的运行时序的一例的图。
30.图6是表示封装装置的运行时序的一例的图。
31.图7是表示封装装置的运行时序的一例的图。
32.图8是表示封装装置的运行时序的一例的图。
33.图9是表示封装装置的另一布局例的图。
34.图10是表示封装装置的运行时序的一例的图。
35.图11是表示封装装置的运行时序的一例的图。
36.图12是表示封装装置的运行时序的一例的图。
37.图13是表示第一接合站中的接合状况的图。
38.图14是表示第二接合站中的接合状况的图。
39.图15是表示第一接合站中的接合状况的图。
40.图16是表示第二接合站中的接合状况的图。
41.图17是表示封装装置的运行时序的一例的图。
42.图18是表示封装装置的运行时序的一例的图。
43.图19是表示封装装置的运行时序的一例的图。
44.图20是另一例的搬运机器人的概略立体图。
45.图21是表示封装装置的运行时序的一例的图。
具体实施方式
46.以下,参照图示说明封装装置10的结构。图1是封装装置10的概略平面图。另外,图2是表示晶片搬运装置12的结构的概略剖面图,图3是搬运机器人28的概略立体图。
47.所述封装装置10制造将半导体芯片102封装于基板晶片100的半导体装置、所谓的“cow”(晶片上芯片(chip on wafer))方式的半导体装置。
48.封装装置10包括一个晶片搬运装置12、第一接合站14f及第二接合站14s。再者,在以下的说明中,在不区别第一、第二的情况下,省略标注f、s,简称为“接合站14”。其他部件也相同。第一接合站14f、第二接合站14s彼此具有相同的结构。另外,晶片搬运装置12与两个接合站14f、接合站14s彼此协作而形成一个腔室。因此,晶片搬运装置12可在不使基板晶片100露出至所述腔室的外部的情况下自一个接合站14搬运至其他接合站14。
49.各接合站14包括接合装置16、以及芯片供给装置18,所述芯片供给装置18在x方向与所述接合装置16相邻配置。接合装置16是将半导体芯片102接合至基板晶片100的装置,且具有载置有基板晶片100的接合台22。在所述接合台22的上方设置有吸附并搬运半导体芯片102的接合头(图1中未图示)。接合头38通过将吸附保持的半导体芯片102按压至基板晶片100表面且进行加热,而电气及机械地固定于基板晶片100上。
50.芯片供给装置18是向接合装置16供给半导体芯片102的装置,且具有芯片供给源24。芯片选择器(picker)(未图示)拾取位于芯片供给源24中的半导体芯片102并进行搬运,供给至接合头38。作为所述芯片供给装置18的结构,可利用公知的现有技术,因此此处省略详细说明。
51.晶片搬运装置12是向两个接合站14两者供给基板晶片100且自两个接合站14回收处理后的基板晶片100的装置。在本例中,晶片搬运装置12设置于两个接合站14之间。更具体而言,第一芯片供给装置18f、第一接合装置16f、晶片搬运装置12、第二接合装置16s及第二芯片供给装置18s按照所述顺序在x方向排成一列配置。就另一个角度而言,两个接合站14以晶片搬运装置12为中心对称配置或者镜像配置。另外,两个接合站14各自的接合装置16与晶片搬运装置12相邻配置,多个接合站14各自的芯片供给装置18隔着接合装置16而配置于晶片搬运装置12的相反侧。
52.晶片搬运装置12是搬运基板晶片100的装置,但要求基板晶片100的上表面保持正常且不能接触。因此,在晶片搬运装置12中设置有吸附保持基板晶片100的底面且进行搬运的搬运机器人28。如图3所示,所述搬运机器人28是具有多个臂34的多关节机器人。所述多关节机器人的结构并无特别限定,在本例中,搬运机器人28包括:在z轴方向可伸缩的基本臂34a、在水平面内可旋转的多个中间臂34b、以及设置于多关节机器人的前端的保持手36。在保持手36的表面形成有多个用以吸附保持基板晶片100的吸附孔36a。所述搬运机器人28具有可接近第一接合台22f及第二接合台22s两者的程度的可移动范围。
53.在晶片搬运装置12的前端部分设置有用以搬入、搬出基板晶片100的载入端口26。在本例中,设置两个所述载入端口26,但载入端口26的个数可为一个,也可为三个以上。另外,多个载入端口26也可分为处理前的基板晶片100待机的搬入用端口、以及实施了封装处理的处理后的基板晶片100待机的搬出用端口。另外,多个载入端口26也可分为收容在第一接合站14f中处理的基板晶片100的端口、以及收容在第二接合站14s中处理的基板晶片100的端口。
54.进而,在晶片搬运装置12中也设置有修正基板晶片100的旋转角度的预对准器30。即,在基板晶片100中通常设置有被称为定向平面的直线部或凹口作为用以规定所述基板晶片100的旋转角度的标记。在向接合台22供给基板晶片100并载置时,必须以所述基板晶片100的标记成为预先规定的朝向(旋转角度)的方式载置。因此,设置有预对准器30,所述预对准器30在将基板晶片100供给至接合台22之前,确认所述基板晶片100的旋转角度并进行修正。预对准器30例如具有载置有基板晶片100的旋转桌30a、以及拍摄基板晶片100的照相机30b。
55.在预对准器30的下侧设置有第一待机台32f、第二待机台32s。所述待机台32是载置有进行了接合处理的基板晶片100的台。所述待机台32例如用于在接合处理后使高温状态的基板晶片100冷却。
56.在以上的结构的封装装置10中,使用单个搬运机器人28及预对准器30,进行在多个接合站14中处理的基板晶片100的供给、回收、或旋转角度的修正。换言之,在本例中,在多个接合站14中共用单个晶片搬运装置12。通过设为所述结构,可更有效率地制造cow方式的半导体装置。
57.即,现有的封装装置10大多相对于一个接合站14设置一个晶片搬运装置12。因此,为了提高制造能力,在设置两个接合站14的情况下,也设置两个晶片搬运装置12。然而,通常大多是将多个半导体芯片102接合至一个基板晶片100,由接合装置16执行的接合处理时间与基板晶片100的搬运或旋转角度修正所需要的时间相比,大幅度地变长。因此,晶片搬运装置12与接合装置16相比,未驱动的待机时间多,浪费多。另一方面,如上所述,晶片搬运装置12具有搬运机器人28等。因此,在设置多个晶片搬运装置12的情况下,空间上及成本上的负担大。
58.因此,在本例中,构成为设置多个接合站14,且在所述多个接合站14中共用单个晶片搬运装置12。通过设置多个接合站14,可提高半导体装置的生产能力。另一方面,晶片搬运装置12仅一个便足够,因此可抑制晶片搬运装置12所花费的费用、空间的增加。
59.另外,如上所述,在本例中,以晶片搬运装置12为中心,镜像配置两个接合站14。通过设为所述配置,可减少死空间。即,两个接合站14的配置形式不限于如图1所示的镜像配
置,也考虑其他配置。例如,也考虑设为如图4所示,自晶片搬运装置12观察时,第一接合站14f位于x方向、第二接合站14s位于y方向的l字状配置。然而,在所述配置的情况下,由l字包围的区域e容易成为死空间,工厂内的布局容易变得困难。另一方面,若设为如图1所示的镜像配置(或一列配置),则难以产生死空间,工厂内的布局变得容易。其中,当然,若不产生空间上的问题,则也可设为如图4所示的l字状配置。另外,即使为任意配置,多个接合站14各自的接合装置16也理想的是与晶片搬运装置12相邻配置。通过设为所述配置,搬运机器人28可在不横贯芯片供给装置18的情况下到达接合装置16。其结果,由于不需要增大搬运机器人28的可移动范围,因此可防止搬运机器人28的大型化。另外,由于搬运机器人28不横贯芯片供给装置18,因此也可有效地抑制搬运机器人28与其他构件的干涉。
60.其次,对所述封装装置10中的封装处理的流程进行说明。图5至图8是表示搬运机器人28的运行时序与基板晶片100的滞留部位的时序图。图5至图8中,第一段表示搬运机器人28搬运基板晶片100的时序。另外,第二段以后表示基板晶片100的滞留部位。更具体而言,于在第一接合站14f中被处理的基板晶片100中,第奇数片的基板晶片100(以下称为“第一奇数晶片w1o”)表示为淡墨的带,第偶数片的基板晶片100(以下称为“第一偶数晶片w1e”)表示为浓墨的带。另外,于在第二接合站14s中被处理的基板晶片100中,第奇数片的基板晶片100(以下称为“第二奇数晶片w2o”)表示为倾斜阴影线的带,第偶数片的基板晶片100(以下称为“第二偶数晶片w2e”)表示为交叉阴影线的带。
61.图5是最基本的时序图。如图5所示,搬运机器人28最初将第一奇数晶片w1o(淡墨)自晶片搬运装置12搬运至第一接合站14f(t1)。在第一接合站14f中,对所述第一奇数晶片w1o执行接合处理。如图5所示,所述接合处理所需要的时间与搬运所需要的时间相比,大幅度地变长。因此,搬运机器人28在对第一奇数晶片w1o执行接合处理的期间中,将第二奇数晶片w2o(倾斜阴影线)自晶片搬运装置12搬运至第二接合站14s(t2)。
62.若第一接合站14f中的接合装置16结束(t3),则搬运机器人28在将第一奇数晶片w1o回收至晶片搬运装置12之后,将第一偶数晶片w1e(浓墨)搬运至第一接合站14f。在第一接合站14f中,对所述第一偶数晶片w1e执行接合处理。在对第一偶数晶片w1e执行接合处理的期间中,第二奇数晶片w2o的接合处理结束(t4)。若为所述状态,则搬运机器人28在将第二奇数晶片w2o回收至晶片搬运装置12之后,将第二偶数晶片w2e(交叉阴影线)搬运至第二接合站14s。以后,重复相同的处理。
63.如上所述,于在一个接合站14中执行接合处理的期间中,向其他接合站14供给或回收基板晶片100。通过设为所述结构,在第一、第二接合站14s中,基板晶片100的供给、回收的时序错开,因此可在多个接合站14中共用单个晶片搬运装置12。再者,当然,预先使两个接合站14f、接合站14s中的基板晶片100的搬运时序错开,以便在第一接合站14f与第二接合站14s中基板晶片100的交换时序不重复。具体而言,在将第一接合站14f、第二接合站14s各自中的接合处理时间设为tb1、tb2,将基板晶片100的交换所需要的时间设为tc,且将两个接合站14f、接合站14s中的基板晶片100的搬运时序的时间差设为td的情况下,需要满足tb1 tc<tb2 td的条件。因此,在第一接合站14f、第二接合站14s中制造相同种类的半导体装置,在tb1=tb2的情况下,只要使时间差td比基板晶片100的交换时间tc大(即tc<td)即可。
64.其次,参照图6说明更具体的运行时序。在图6的例子中,各基板晶片100被收容于
载入端口26中,自所述载入端口26经由预对准器30被供给至接合站14。若具体说明,则搬运机器人28将第一奇数晶片w1o(淡墨)自载入端口26搬运至预对准器30(t1)。在预对准器30中,确认第一奇数晶片w1o的旋转角度,视需要进行修正。若旋转角度的修正结束,则搬运机器人28将第一奇数晶片w1o自预对准器30供给至第一接合站14f(t2)。在第一接合站14f中,对所述第一奇数晶片w1o执行接合处理。
65.若对第一奇数晶片w1o的接合处理开始,则搬运机器人28将第二奇数晶片w2o(倾斜阴影线)自载入端口26搬运至预对准器30(t3)。然后,若在预对准器30中结束旋转角度的修正,则搬运机器人28将第二奇数晶片w2o自预对准器30供给至第二接合站14s(t4)。
66.若第一奇数晶片w1o的接合处理结束,则搬运机器人28在将第一奇数晶片w1o自第一接合站14f回收至载入端口26之后,将第一偶数晶片w1e(浓墨)自载入端口26搬运至预对准器30(t5)。然后,若预对准器30中的处理结束,则将所述第一偶数晶片w1e自预对准器30供给至第一接合站14f(t6)。
67.同样地,若第二奇数晶片w2o的接合处理结束,则搬运机器人28在将第二奇数晶片w2o自第二接合站14s回收至载入端口26之后,将第二偶数晶片w2e(交叉阴影线)自载入端口26搬运至预对准器30(t7)。然后,若预对准器30中的处理结束,则将所述第二偶数晶片w2e自预对准器30供给至第二接合站14s(t8)。以后,重复相同的处理。
68.如上所述,在图6的例子中,也于在一个接合站14中执行接合处理的期间中,进行在其他接合站14中处理的基板晶片100的搬运及旋转角度修正。通过设为所述结构,可在多个接合站14中共用单个搬运机器人28及预对准器30。
69.其次,参照图7、图8说明处理后的基板晶片100为高温时的运行时序。在将半导体芯片102接合至基板晶片100时,存在半导体芯片102及基板晶片100在高温下受到加热的情况。因此,接合处理刚结束后的基板晶片100为高温,因此存在无法直接收容于载入端口26中的情况。所述情况下,处理后的基板晶片100于在待机台32被临时保管并冷却之后,被搬运至载入端口26。图7、图8表示所述情况下的运行时序的一例。
70.首先,说明图7的例子。在图7的例子中,在使在第一接合站14f中处理的基板晶片100在第一待机台32f待机的期间中,进行第二接合站14s中的基板晶片100的更换。具体而言,搬运机器人28首先将第一奇数晶片w1o(淡墨)经由预对准器30搬运至第一接合站14f(t1,t2)。进而,搬运机器人28在对第一奇数晶片w1o进行接合的期间中,将第二奇数晶片w2o(倾斜阴影线)经由预对准器30搬运至第二接合站14s(t3,t4)。
71.若第一奇数晶片w1o的接合处理结束,则搬运机器人28将第一奇数晶片w1o搬运至第一待机台32f,而并非搬运至载入端口26(t5)。若所述搬运结束,则搬运机器人28接下来将第一偶数晶片w1e(浓墨)经由预对准器30搬运至第一接合站14f(t6)。进而,在本例中,在第一奇数晶片w1o的待机期间中,第二奇数晶片w2o的接合处理结束(t7)。因此,在本例中,在第一奇数晶片w1o的待机期间中,进行第一接合站14f中的基板晶片100的交换(t7,t8)。
72.之后,在第一偶数晶片w1e及第二偶数晶片w2e的接合处理的执行过程中,经过第一奇数晶片w1o及第二奇数晶片w2o的待机时间,两个晶片被充分地冷却。若为所述状态,则搬运机器人28自各待机台32回收基板晶片100,并将其搬运至载入端口26(t9,t10)。以后,重复相同的顺序。
73.如上所述,在图7的例子中,也可在多个接合站14中共用单个搬运机器人28及预对
准器30。再者,于在第一待机台32f中使基板晶片100待机的期间中,为了进行第二接合站14s中的基板晶片100的交换,当然,在将第一接合站14f、第二接合站14s各自中的接合处理时间设为tb1、tb2,将两个接合站14f、接合站14s中的基板晶片100的搬运时序的时间差设为td,且将第一待机台32f中的基板晶片100的待机时间设为tw的情况下,必须为tb1 tw>td tb2,在tb1=tb2的情况下,必须为待机时间比时间差大(即tw>td)。换言之,于在其中一个接合站14中处理的基板晶片100的待机期间中,通过在另一个接合站14中进行基板晶片100的交换,可缩短两个接合站14f、接合站14s中的基板晶片100的搬运时序的时间差td,可缩短整体的处理时间。
74.其次,参照图8说明使在其中一个接合台22中被处理的基板晶片100的待机与另一个接合台22中的基板晶片100的交换不重复的例子。在图8的例子中,也与图7同样地,若对第一奇数晶片w1o的接合处理结束,则搬运机器人28在将第一奇数晶片w1o自第一接合站14f搬运至第一待机台32f之后,将第二偶数晶片w2e搬运至第一接合站14f(t5,t6)。在图8的例子中,在第二奇数晶片w2o的接合处理结束之前,第一奇数晶片w1o的待机时间到期(t7)。因此,搬运机器人28在第二接合站14s中的基板晶片100的交换(t8,t9)之前,将第一奇数晶片w1o自第一待机台32f搬运至载入端口26。之后,若第二偶数晶片w2e的接合处理结束,则在将第二奇数晶片w2o搬运至第二待机台32s之后,将第二偶数晶片w2e搬运至第二接合站14s(t8,t9)。
75.如上所述,在图8的例子中,也可在多个接合站14中共用单个搬运机器人28及预对准器30。另外,根据图8的例子,第一待机台32f中的待机时间与第二待机台32s中的待机时间不重复。因此,根据所述结构,不需要设置两个待机台32,可在两个接合站14f、接合站14s中共用一个待机台32。再者,所述情况下,需要满足tb1 tw<td tb2,若为tb1=tb2,则需要满足tw<td。
76.其次,对其他例子进行说明。图9是表示封装装置10的其他配置例的图像图。在图9的例子中,与图1的例子相同,两个接合站14f、接合站14s隔着一个晶片搬运装置12而被镜像配置。在图9的例子中,进而在晶片搬运装置12的y方向(与两个接合站14的排列方向正交的方向)里侧设置有检查装置20。所述检查装置20检查进行了接合处理的处理后的基板晶片100(即、半导体装置)并判断制品的好坏。所述检查装置20例如具有照相机或红外线传感器等。所述检查装置20的结构可使用公知的现有技术,因此此处省略详细说明。
77.与晶片搬运装置12同样地,仅设置一个所述检查装置20,且可在多个接合站14中共用。通过设为所述结构,可减少检查装置20的设置所需要的空间、费用。再者,在图9的例子中,将检查装置20配置于晶片搬运装置12的外侧,但检查装置20也可组装于晶片搬运装置12的内部。
78.其次,参照图10至图12说明检查处理后的基板晶片100时的运行时序的例子。图10表示最基本的运行时序。在图10的例子中,在第一奇数晶片w1o(淡墨)被搬运至第一接合站14f之后(t1),在经过时间差td之后,第二奇数晶片w2o(倾斜阴影线)被搬运至第二接合站14s(t2)。之后,在第一奇数晶片w1o的接合处理结束时,搬运机器人28在将第一奇数晶片w1o搬运至检查装置20之后,将第一偶数晶片w1e(浓墨)搬运至第一接合站14f(t3)。然后,若第一奇数晶片w1o的检查结束,则搬运机器人28将第一奇数晶片w1o搬运至晶片搬运装置12的载入端口26(t4)。在第一奇数晶片w1o的检查结束之后,第二奇数晶片w2o的接合处理
结束(t5)。若为所述状态,则搬运机器人28在将第二奇数晶片w2o搬运至检查装置20之后,将第二偶数晶片w2e搬运至第二接合站14s。以后,重复相同的顺序。
79.根据以上的说明可明确,在所述例子中,除了晶片搬运装置12以外,检查装置20也可在多个接合站14中共用。其结果,可减少检查装置20的设置所需要的空间、费用。再者,为了在两个接合站14中共用一个检查装置20,需要使在第一接合站14f中处理的基板晶片100的检查期间与第二接合站14s中处理的基板晶片100的检查期间不重复。为此,在将检查时间设为tt的情况下,需要满足tb1 tt<td tb2,在tb1=tb2的情况下,需要设置比检查时间tt大的时间差td(即,td>tt)。
80.图11是表示更详细的运行时序的例子的图。在图11的例子中,通过接合处理而获得的处理后的基板晶片100于在待机台32中待机一次之后,经由预对准器30被发送至检查装置20(t5~t7,t8~t10)。所述情况下,可知在将待机及预对准(prealign)所需要的时间设为tw的情况下,需要满足tb1 tw tt<td tb2 tw,在tb1=tb2的情况下,只要满足tt<td即可。另外,在图11的例子中,为了缩小时间差td,于在第一接合站14f中处理的基板晶片100的检查时间中,进行第二接合站14s中的基板晶片100的交换。在设为所述结构的情况下,只要设为tb1 tw tt>td tb2即可,在tb1=tb2的情况下,可使时间差td小于tw tt。其结果,可减少整体的处理时间。
81.图12表示检查处理后的基板晶片100且使在其中一个接合台22中被处理的基板晶片100的检查与另一个接合台22中的基板晶片100的交换不重复的例子。具体而言,在图12的例子中,以在第一奇数晶片w1o(淡墨)的接合处理、待机、预对准、检查(t5~t8)结束之后第二奇数晶片w2o(倾斜阴影线)的接合处理结束(t9)的方式设定时间差td。具体而言,设为tb1 tw tt<td tb2(在tb1=tb2的情况下,tw tt<td)。通过设为所述结构,避免了检查时间的重复,因此可将待机台32的个数设为一个。
82.其次,参照图13至图19说明其他例子。在至今为止的说明中,说明了对一个基板晶片100的接合处理在一个接合站14中结束的情况。然而,根据半导体装置的种类,存在有在两个接合站14中进行串列处理更有效率的情况。例如,半导体装置中有将彼此不同的两种半导体芯片102层叠而成者。在制造所述半导体芯片102时,若如图13所示利用第一接合站14f的接合头38f接合第一半导体芯片102f,之后,如图14所示利用第二接合站14s的接合头38f在第一半导体芯片102f上接合第二半导体芯片102s,则效率良好。
83.另外,在接合半导体芯片102时,存在分开进行临时压接与正式压接优选的情况。临时压接是临时放置半导体芯片102的步骤,通常在附着于半导体芯片102的底面的热硬化性树脂硬化但金属凸块104不熔融的程度的低温t1下对半导体芯片102进行加热加压。另外,正式压接是用于最终封装经临时压接的半导体芯片102的步骤,通常在金属凸块104熔融的程度的高温t2下对半导体芯片102进行加热加压。此处,于在一个接合站14中进行临时压接与正式压接此两者的情况下,需要切换接合头38或接合台22的温度,相应地,花费多余的时间,而导致生产效率的恶化。因此,所述情况下,若如图15所示利用第一接合站14f的接合头38f进行半导体芯片102的临时压接,之后,如图16所示利用第二接合站14s的接合头38s对经临时压接的半导体芯片102进行正式压接,则效率良好。
84.此处,在本例的封装装置10中,两个接合站14经由晶片搬运装置12连结,两个接合站14及晶片搬运装置12彼此协作而形成自外部隔绝的一个腔室。因此,在将基板晶片100自
第一接合站14f搬运至第二接合站14s时,不需要将所述基板晶片100取出至腔室的外部。因此,在搬运基板晶片100时,不需要将基板晶片100收容于用于防止污染的搬运容器(例如前端开启式晶片传送盒(front opening unified pod,foup))中,可容易地搬运。
85.图17至图19表示在两个接合站14中对一个基板晶片100进行串列处理时的运行时序。在图17至图19中,在封装装置10中处理的基板晶片100中,淡墨、浓墨、倾斜阴影线、交叉阴影线的带分别表示第一片、第二片、第三片、第四片基板晶片100。
86.图17表示最基本的运行时序。在图17的例子中,首先,将第一片基板晶片100自晶片搬运装置12搬运至第一接合站14f(t1),执行对第一片基板晶片100的接合处理。若对第一片基板晶片100的接合处理结束,则搬运机器人28将第一片基板晶片100自第一接合站14f搬运至第二接合站14s(t2)。
87.在所述时间点,第一接合站14f空闲,因此搬运机器人28将第二片基板晶片100重新搬运至第一接合站14f。由此,在第一接合站14f及第二接合站14s并行地执行接合处理。然后,若对第二接合站14s中的第一片基板晶片100的接合处理结束,则搬运机器人28将所述第一片基板晶片100搬运至晶片搬运装置12(t3)。由此,可获得对一个基板晶片100实施了利用第一接合站进行的接合处理及利用第二接合站14s进行的接合处理的处理后的基板晶片100(半导体装置)。
88.若第二接合站14s空闲,则搬运机器人28将位于第一接合站14f的第二片基板晶片100搬运至第二接合站14s。而且,以后重复相同的处理。
89.根据以上的说明可明确,通过设为自第一接合站14f向第二接合站14s搬运基板晶片100的结构,可有效率地对一个基板晶片100进行不同的两种接合处理。
90.其次,参考图18说明运行时序的更具体的例子。图18的例子是如参照图15、图16所说明那样在第一接合站14f对一片基板晶片100进行临时压接处理且在第二接合站14s进行正式压接处理时的运行时序的一例。在临时压接处理中,由于在一个地方层叠多个半导体芯片102,因此临时压接处理所需要的时间与正式压接处理所需要的时间相比变长。另外,在临时压接中,在较低的温度下加热半导体芯片102,因此不需要处理后的冷却(待机),另一方面,在正式压接中,在高温下加热半导体芯片102,因此在处理后需要冷却(待机)。另外,每当临时压接及正式压接结束时,利用检查装置20进行检查,但在进行所述检查时,基板晶片100由预对准器30进行角度修正。
91.若具体说明,则第一片基板晶片100(淡墨)经由预对准器30被搬运至第一接合站14f(t1,t2)。在第一接合站14f中,对基板晶片100实施临时压接处理。若所述临时压接处理结束,则搬运机器人28将临时压接处理后的基板晶片100经由预对准器30搬运至检查装置20(t3,t4)。另外,若为所述状态,则由于第一接合站14f空闲,因此搬运机器人28向所述第一接合站14f搬运第二片基板晶片100(浓墨)(t4,t5)。
92.若对第一片基板晶片100的检查结束,则搬运机器人28将所述第一片基板晶片100经由预对准器30搬运至第二接合站14s(t6,t7)。在第二接合站14s中,对第一片基板晶片100实施正式压接处理。若所述正式压接处理结束,则再次利用检查装置20进行检查,但正式压接处理后的基板晶片100由于为高温,因此事先被搬运至待机台32并进行冷却(t11)。若可充分地冷却,则第一片基板晶片100经由预对准器30被搬运至检查装置20(t13,t14)。然后,若所述检查结束,则将第一片基板晶片100输出至载入端口26(t15)。第二片基板晶片
100也以与第一片基板晶片100相同的顺序实施处理。另外,第三片以后的基板晶片100也同样地依次被追加。
93.此处,虽然存在一些时间差,但第一片基板晶片100(淡墨)的第一次检查(t4~)与第二片基板晶片100(浓墨)的临时压接处理(t5~)大致同时开始。而且,为了避免第二片基板晶片100的第一次检查(t9~)与第一片基板晶片100的第二次检查(t14~)的重复,在将临时压接处理时间设为tb1,将正式压接处理时间设为tb2,将检查时间设为tt,且将待机时间设为tw的情况下,只要设为tb1 tt<tt tb2 tw、即tb1<tb2 tw即可。
94.根据以上的说明可明确,根据图18的例子,可有效率地执行对一个基板晶片100串列实施临时压接处理与正式压接处理的步骤。另外,若tb2<tb1<tb2 tw,则在临时压接处理及正式压接处理之后可利用一个检查装置20检查基板晶片100。
95.其次,参照图19说明运行时序的另一例。图19的例子是如参照图13、图14所说明那样在第一接合站14f将第一半导体芯片102f接合至一片基板晶片100且在第二接合站14s将第二半导体芯片102s接合至一片基板晶片100时的运行时序的一例。所述情况下,由于第一接合站14f、第二接合站14s均在高温下加热半导体芯片102,因此每当在第一接合站14f、第二接合站14s中的接合处理结束时,需要使基板晶片100在待机台32冷却。
96.若具体说明,则第一片基板晶片100(淡墨)经由预对准器30被搬运至第一接合站14f(t1,t2)。在第一接合站14f中,将第一半导体芯片102f接合至基板晶片100。若所述接合处理结束,则搬运机器人28将第一片基板晶片100搬运至待机台32并使其冷却(t3)。若为所述状态,则由于第一接合站14f空闲,因此搬运机器人28将第二片基板晶片100(浓墨)搬运至所述第一接合站14f(t3,t4)。若第一片基板晶片100可充分地冷却,则搬运机器人28将第一片基板晶片100经由预对准器30搬运至检查装置20(t5,t6)。
97.若对第一片基板晶片100的检查结束,则搬运机器人28将所述第一片基板晶片100经由预对准器30搬运至第二接合站14s(t7,t8)。在第二接合站14s中,将第二半导体芯片102s接合至第一片基板晶片100。若所述接合处理结束,则第一片基板晶片100经由待机台32、预对准器30被搬运至检查装置20(t13~t16)。然后,若第二次检查结束,则第一片基板晶片100被输出至载入端口26(t17)。第二片基板晶片100也以与第一片基板晶片100相同的顺序实施处理。另外,第三片以后的基板晶片100也同样地依次被追加。
98.根据以上的说明可明确,根据所述图19的例子,可有效率地执行对一个基板晶片100串列接合第一半导体芯片102f与第二半导体芯片102s的步骤。
99.其次,参照图20、图21说明其他例子。在至今为止的说明中,一个搬运机器人28仅具有一个吸附保持基板晶片100的保持手36。所述情况下,为了在自一个接合站14回收基板晶片100之后供给新的基板晶片100,搬运机器人28需要在载入端口26与接合站14之间往返两次。因此,为了减少所述往返次数,如图20所示,也可在一个搬运机器人28中设置两个保持手36。通过设为所述结构,搬运机器人28在自一个接合站14回收基板晶片100之后,在不移动的情况下立即向所述接合站14供给新的基板晶片100。其结果,可通过一次往返动作实现基板晶片100的回收与供给,可进一步缩短处理时间。
100.图21是表示所述情况下的运行时序的一例的图。图21的例子中,彼此独立地驱动第一接合站14f与第二接合站14s,且在两个接合站14之间不存在基板往来。但是,图20所示的具有两个保持手36的搬运机器人28也可于在第一接合站14f、第二接合站14s中对一个基
板晶片100串列处理的情况下利用。
101.图21的例子中,首先,第一奇数晶片w1o经由预对准器30被搬运至第一接合站14f(t1,t2)。另外,在对所述第一奇数晶片w1o的接合处理的执行期间中,第二奇数晶片w2o经由预对准器30被搬运至第二接合站14s(t3,t4)。
102.若第一接合站14f中的接合处理结束,则进行第一奇数晶片w1o与第一偶数晶片w1e的更换。为了进行所述更换,在接合处理结束前,第一偶数晶片w1e由搬运机器人28搬运至预对准器30,并修正其旋转角度(t5)。之后,搬运机器人28在第一保持手36f吸附第一偶数晶片w1e的状态下移动至第一接合站14f。然后,在第一接合站14f中,搬运机器人28在利用第二保持手36s吸附并回收第一奇数晶片w1o之后,将第一偶数晶片w1e载置于第一接合站14f(t6)。然后,搬运机器人28在吸附第一奇数晶片w1o的状态下向载入端口26移动,将第一奇数晶片w1o输出至载入端口26。以后,在第一接合站14f、第二接合站14s各自中重复相同的处理。
103.根据以上的说明可明确,根据本例,由于在一个搬运机器人28中设置两个保持手36,因此可通过一次往返动作来实现基板晶片100的回收与供给,可进一步缩短处理时间。
104.再者,至今为止说明的结构为一例,若为在多个接合站14中共用至少一个晶片搬运装置12,则其他结构也可适宜变更。
105.符号的说明
106.10:封装装置
107.12:晶片搬运装置
108.14f:第一接合站
109.14s:第二接合站
110.16:接合装置
111.18:芯片供给装置
112.20:检查装置
113.22:接合台
114.24:芯片供给源
115.26:载入端口
116.28:搬运机器人
117.30:预对准器
118.30a:旋转桌
119.30b:照相机
120.32:待机台
121.34:臂
122.36:保持手
123.38:接合头
124.100:基板晶片
125.102:半导体芯片
126.104:金属凸块
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。