1.本发明大体上涉及驾驶员行为检测,尤其涉及一种通过导航地图和疲劳检测增强驾驶员安全性的驾驶员行为系统。
背景技术:
2.车辆越来越依赖技术。利用导航系统、驾驶疲劳识别和车辆自动驾驶等特点,驾驶员可以比以往更加依赖车辆来提供安全保障。传统的导航系统通过在地图上提供出行路线,以及识别兴趣点、出行距离和时间来协助车辆驾驶员。作为在地图上识别和选择路线的一部分,所述导航系统通常考虑车辆行驶的地理区域内的交通和事故报告,以缩短行驶距离和时间。诸如驾驶员辅助系统等的其它车辆系统已越来越重视安全。这些系统有助于通过驾驶疲劳识别等机制预防与驾驶疲劳和困倦相关的事故。此外,已经证明车辆自动驾驶能够极大地辅助道路上的驾驶员,特别是避免事故以及提高驾驶员安全。虽然这些技术以及许多其它技术对驾驶员来说是无价的,但仍然需要提高车辆的安全性。
技术实现要素:
3.根据本发明的一个方面,提供一种计算机实现方法,包括:访问存储有地图数据的一个或多个数据源,其中,所述地图数据包括一个或多个第一车辆中的驾驶员的针对路线的一个或多个路段的历史疲劳数据和当前疲劳数据;基于通过访问所述一个或多个数据源得到的所述地图数据,生成第二车辆的驾驶员个性化疲劳地图,其中,所述个性化疲劳地图显示有针对于所述第二车辆的所述驾驶员在所述路线的所述一个或多个路段上的预测的驾驶疲劳;监控所述一个或多个第一车辆和所述第二车辆的所述驾驶员,以基于一个或多个传感器捕获的读数检测驾驶疲劳,其中,所述驾驶疲劳的程度是根据疲劳分数测量的;以及在检测到所述驾驶疲劳时,向所述第二车辆的驾驶员输出基于所述驾驶疲劳的程度的推荐内容,并更新所述个性化疲劳地图以体现所述推荐内容。
4.可选地,在任一前述方面中,所述地图数据还包括从在线地图数据源获取的在线地图数据;所述历史疲劳数据是在过去的特定时段内为所述一个或多个第一车辆中的所述驾驶员收集的,且所述历史疲劳数据用于生成指示所述一个或多个第一车辆中的每个第一车辆沿所述路线的所述一个或多个路段的所述驾驶疲劳的历史疲劳地图;以及所述当前疲劳数据是为所述一个或多个第一车辆中的所述驾驶员实时地收集的,且所述当前疲劳数据用于生成指示所述一个或多个第一车辆中的每个第一车辆沿所述路线的所述一个或多个路段的所述驾驶疲劳的当前疲劳地图。
5.可选地,在任一前述方面中,生成所述个性化疲劳地图包括:将所述在线地图、所述历史疲劳地图以及所述当前疲劳地图应用到学习算法以生成所述个性化疲劳地图。
6.可选地,在任一前述方面中,所述方法还包括:基于参数集合和目标函数计算所述一个或多个第一车辆中的所述驾驶员的疲劳分数;以及当所述一个或多个第一车辆中的所述驾驶员是所述第二车辆中的所述驾驶员的相邻驾驶员,且基于检测到的所述一个或多个
第一车辆中的所述驾驶员的所述驾驶疲劳对所述第二车辆的所述驾驶员构成安全风险时,作为推荐内容,提醒所述第二车辆的所述驾驶员避开被确定构成安全风险的所述相邻驾驶员。
7.可选地,在任一前述方面中,所述方法还包括:更新所述历史疲劳地图和所述当前疲劳地图以体现所述一个或多个第一车辆中的所述驾驶员的所述疲劳程度;以及更新所述个性化疲劳地图以更改所述第二车辆的所述路线,以避开被确定构成安全风险的所述相邻驾驶员。
8.可选地,在任一前述方面中,所述方法还包括:当检测到所述第二车辆中的所述驾驶员驾驶疲劳时,基于参数集合和目标函数计算所述第二车辆中的所述驾驶员的疲劳分数;以及基于所述一个或多个第一车辆中的所述驾驶员的所述历史疲劳数据和所述当前疲劳数据以及所述计算得到的所述第二车辆的所述驾驶员的所述疲劳分数,提醒所述第二车辆的所述驾驶员。
9.可选地,在任一前述方面中,所述方法还包括:更新所述个性化疲劳地图以基于所述计算得到的所述第二车辆的所述驾驶员的所述疲劳分数来更改所述第二车辆的所述路线;以及更新所述历史疲劳地图和所述当前疲劳地图以体现所述一个或多个第一车辆中的所述驾驶员的所述疲劳程度。
10.可选地,在任一前述方面中,所述参数集合包括持续时间、用户数量、道路场景、疲劳时间、疲劳持续时间、气候和驾驶员长期驾驶模式中的一个或多个。
11.可选地,在任一前述方面中,所述更改包括:当所述驾驶疲劳的程度被计算为第一程度时,向所述第二车辆的所述驾驶员提供预警;当驾驶疲劳的程度被计算为第二程度时,向所述第二车辆的所述驾驶员提供预警并提供到附近休息点的替代路线;以及当所述驾驶疲劳的程度被计算为第三程度时,向所述第二车辆的所述驾驶员提供预警,并使所述第二车辆进入自动驾驶模式。
12.根据本发明的另一个方面,提供一种设备,包括:包括指令的非瞬时性存储器;以及与所述存储器通信的一个或多个处理器,其中所述一个或多个处理器执行所述指令以执行以下操作:访问存储有地图数据的一个或多个数据源,其中,所述地图数据包括一个或多个第一车辆中的驾驶员的针对路线的一个或多个路段的历史疲劳数据和当前疲劳数据;基于通过访问所述一个或多个数据源得到的所述地图数据,生成第二车辆的驾驶员的个性化疲劳地图,其中,所述个性化疲劳地图显示有针对于所述第二车辆的所述驾驶员在所述路线的所述一个或多个路段上的预测的驾驶疲劳;监控所述一个或多个第一车辆和所述第二车辆的所述驾驶员,以基于一个或多个传感器捕获的读数检测驾驶疲劳,其中,所述驾驶疲劳的程度是根据疲劳分数测量的;以及在检测到所述驾驶疲劳时,向所述第二车辆的驾驶员输出基于所述驾驶疲劳的程度的推荐内容,并更新所述个性化疲劳地图以体现所述推荐内容。
13.根据本发明的另一个方面,提供一种非瞬时性计算机可读介质,存储有计算机指令,其中,当所述计算机指令被一个或多个处理器执行时,使得所述一个或多个处理器执行以下步骤:访问存储有地图数据的一个或多个数据源,其中,所述地图数据包括一个或多个第一车辆中的驾驶员的针对路线的一个或多个路段的历史疲劳数据和当前疲劳数据;基于通过访问所述一个或多个数据源得到的所述地图数据,生成第二车辆的驾驶员的个性化疲
劳地图,其中,所述个性化疲劳地图显示有针对于所述第二车辆的所述驾驶员在所述路线的所述一个或多个路段上的预测的驾驶疲劳;监控所述一个或多个第一车辆和所述第二车辆的所述驾驶员,以基于一个或多个传感器捕获的读数检测驾驶疲劳,其中,所述驾驶疲劳的程度是根据疲劳分数测量的;以及在检测到所述驾驶疲劳时,向所述第二车辆的所述驾驶员输出基于所述驾驶疲劳的程度的推荐内容,并更新所述个性化疲劳地图以体现所述推荐内容。
14.提供本发明内容以通过简化的形式介绍在下文具体实施方式中进一步描述的概念的选择。本发明内容并非旨在识别所要求保护的标的物的关键特征或基本特征,也不用于帮助确定所要求保护的标的物的范围。所要求保护的标的物不限于解决背景技术中指出的任何或所有缺点的实施方式。
附图说明
15.本发明的各个方面通过示例的方式示出,并且不受附图限制,附图中利用相似的附图标记表示元件。
16.图1示出了用于车辆的示例导航和驾驶疲劳识别系统;
17.图2a示出了机器学习引擎生成个性化疲劳地图的示例实施例;
18.图2b示出了在线地图的示例;
19.图2c示出了包括驾驶员历史行为信息的示例地图;
20.图2d示出了包括驾驶员当前行为信息的示例地图;
21.图2e示出了包括驾驶员个性化行为信息的示例地图;
22.图3a示出了生成和更新个性化疲劳地图的示例流程图;
23.图3b示出了根据本发明实施例的示例路线规划策略;
24.图4a示出了具有显示有疲劳检测信息的导航系统的车辆驾驶室;
25.图4b和图5示出了当根据个性化疲劳地图检测到驾驶疲劳时从车辆内部的驾驶员视图;以及
26.图6示出了可实施本发明的实施例的计算系统。
具体实施方式
27.现在将参考附图来描述本发明,这些附图通常涉及驾驶员行为检测。
28.驾驶时驾驶员行为,包括疲劳相关行为,可能导致不安全驾驶并增加发生事故的可能性。所公开的实施例提供一种机制,用于使用音频和/或视觉技术来捕获驾驶员行为,以识别各种类型的驾驶员行为,例如,疲劳相关行为。在一个实施例中,针对多个驾驶员(例如,驾驶员集合)在预定义的时段内捕获和收集驾驶员行为,以创建包括疲劳驾驶员信息的历史地图。在另一实施例中,实时捕获及收集多个驾驶员的驾驶员行为,以创建包括疲劳驾驶员信息的当前时刻的动态地图。所述历史地图和所述当前时刻的动量地图,以及车辆当前驾驶员的驾驶员行为的检测,可以用于生成包括当前驾驶疲劳信息的个性化地图。所述个性化地图(即,个性化疲劳地图)可以用于向当前驾驶员生成各种提醒和动作,以防止不安全驾驶,例如,在驾驶时睡着,并提醒或通知当前驾驶员邻近车辆中的驾驶员的不安全驾驶。
29.应理解,本发明的实施例可以以许多不同形式实施,并且权利要求范围不应被解释为限于本文中阐述的实施例。相反,提供这些实施例使得本发明将是透彻和完整的,并且将向本领域技术人员充分传达本发明的实施例概念。事实上,本发明公开旨在覆盖包括在由所附权利要求书限定的本发明公开的精神和范围内的这些实施例的替代物、更改和等同物。此外,在以下对本发明实施例的详细描述中,阐述了许多具体细节以提供透彻的理解。然而,本领域普通技术人员将清楚的是,可以在没有这些具体细节的情况下,实施本发明的本实施例。
30.驾驶员越来越多地使用汽车和移动设备导航系统来协助寻找到达目的地的路线。当由驾驶员设定目的地时,这些系统能够在驾驶过程中实时地利用路径规划指令为驾驶员指路。也可以通过使用各种特征的路径规划软件来识别替代路线和最佳路线。驾驶员可以在监控或随时了解当前交通状况、天气状况或其它可能对出行产生不利影响的因素时,使用导航系统来规划路线。这些系统也可以与其它应用程序、软件或系统结合使用,以进一步帮助驾驶员。一个关心的领域是基于驾驶员的特殊需求对车辆进行个性化路线选择。例如,如果驾驶员出现疲劳的初始症状,可能需要发出进行休息的预警,而如果驾驶员完全出现完全疲劳症状,则需要关于最近的休息站的推荐内容。
31.图1示出了用于车辆的示例导航和驾驶员行为识别系统。所述系统100基于多种因素提供个性化路线选择和导航信息,这些因素包括但不限于车辆所经过路线上的历史驾驶疲劳、当前驾驶疲劳(或当前时刻的动态驾驶疲劳)和个性化驾驶疲劳。驾驶疲劳信息与导航系统和路线制定(或路线选择)信息相结合,提供了用于制定路线并提高驾驶员意识和安全的稳健平台,特别是在驾驶疲劳是或成为因素的情况下。
32.在所示实施例中,所述系统100包括车辆101、疲劳检测器106和导航系统120。所述车辆101示出了驾驶室,所述驾驶室包括驾驶员102(和乘客)以及与所述车辆101通信地耦合的所述疲劳检测器106和所述导航系统120。在一个实施例中,所述疲劳检测器106和/或所述导航系统120(或其任意一个或多个部分)可以位于所述车辆101中。在另一实施例中,所述疲劳检测器106和/或所述导航系统120(或其任意一个或多个部分)可以位于远离所述车辆101的位置,并且通过一个或多个网络(未示出)进行通信。在另一个实施例中,捕获设备103位于能够捕获与驾驶疲劳相关的信息的位置。
33.所述一个或多个网络可以是数据网络、无线网络、电话网络或其任意组合。需要说明的是,所述数据网络可以是任何局域网(local area network,lan)、城域网(metropolitan area network,man)、广域网(wide area network,wan)、公共数据网络(例如,互联网)、短距离无线网络或其它任何合适的分组交换网络。此外,所述无线网络例如可以是蜂窝网络,并且可以采用各种技术,包括增强的全球演进数据速率(enhanced data rates for global evolution,edge)、通用分组无线服务(general packet radio service,gprs)、全球移动通信系统(global system for mobile communications,gsm)、互联网协议多媒体子系统(internet protocol multimedia subsystem,ims)、通用移动通信系统(universal mobile telecommunications system,umts)等,以及其它任何合适的无线介质,例如,全球微波接入互操作性(worldwide interoperability for microwave access,wimax)、长期演进(long term evolution,lte)网络,码分多址(code division multiple access,cdma)、宽带码分多址(wideband code division multiple access,
wcdma)、无线保真(wireless fidelity,wi
‑
fi)、无线lan(wlan)、fi)、无线lan(wlan)、互联网协议(internet protocol,ip)数据传输、卫星、移动临时网络(mobile ad
‑
hoc network,manet)等、或其任何组合。
34.在所示实施例中,所述疲劳检测器106包括捕获设备103、驾驶员行为检测器105以及关联的配置文件107、一个或多个处理器108、机器学习引擎108、输入/输出(input/output,i/o)接口110、存储器112、显示器114、通信设备116以及数据库118。
35.所述捕获设备103可以负责利用位于驾驶室内的一个或多个诸如传感器103a、摄像机103b或麦克风103c等的捕获设备基于捕获的驾驶员运动和/或音频数据来监控及识别驾驶员行为。在一个实施例中,所述捕获设备103用于捕获驾驶员头部和面部的运动,而在其它实施方式中,也用于捕获驾驶员的躯干和/或驾驶员的肢体和手的运动。例如,所述驾驶员行为检测器105可以监控所述捕获设备103捕获的驾驶员行为,以检测特定的姿势,例如,在驾驶车辆时,驾驶员是否用双手握住车辆的方向盘,或驾驶车辆时,驾驶员是否举起一只手臂且手握拳。
36.其它实施例包括经由所述麦克风103c一起捕获音频数据和驾驶员运动数据或分开捕获音频数据和驾驶员运动数据。捕获的音频例如可以是所述麦克风103c捕获的所述驾驶员102的音频信号。可以分析所述音频以检测各种可能随驾驶员的状态而变化的特征。这种音频特征的示例包括模糊的语音或打鼾,这可能指示驾驶员处于疲劳或困倦状态。
37.尽管所述捕获设备103被描述为具有多个组件的单个设备,但应理解的是,每个组件(例如,传感器、摄像机或麦克风)可以是位于所述车辆101的不同区域中的单独组件。例如,所述传感器103a、所述摄像机103b和所述麦克风103c可以分别位于车辆驾驶室的不同区域。在另一示例中,所述捕获设备103的单个组件可以是另一组件或设备的一部分。例如,所述摄像机103b和所述显示器114可以是放置在车辆驾驶室中的移动电话或平板(未示出)的一部分,而所述传感器103a和所述麦克风103c可以单独地位于车辆驾驶室中的不同位置。
38.所述驾驶员行为检测器105可与所述配置文件107相关联,并且可以一起检测指示所述车辆101的驾驶员102的行为方式的一个或多个属性,所述配置文件107建模驾驶员行为并在下文进一步解释。驾驶员行为可以包括例如驾驶员的正常眨眼率、凝视方向、肢体和/或躯干位置和/或其它驾驶员运动和活动或驾驶员声音或音频。当驾驶员102的行为实质上偏离所述配置文件107时,可能指示不稳定或异常的驾驶员行为,其暗示车辆的安全及其乘员的风险在增加。例如,快速眨眼率或不正常的凝视方向可以表明驾驶员处于疲劳状态。在另一个示例中,打呼噜或含糊不清的讲话可能指示驾驶员即将或已经在驾驶时睡着。如下面进一步解释的,结合历史和当前路线制定数据或信息实时地评估驾驶员行为使得所述系统100能够响应于检测到不想要的驾驶员行为而提供实时反馈(例如,提醒、消息、重新路线选择等)。
39.在一个实施例中,可以将所述驾驶员行为与个人配置文件或驾驶员配置文件的集合组或配置文件“阈值”进行比较,其中的每个配置文件可用作比较的基准。所述比较可用于确定驾驶员的特定动作(例如,面部表情、动作或声音)是否构成可接受(例如,疲劳不是问题或可能不是问题)或不可接受的(例如,疲劳可能是问题或是问题)驾驶员行为。例如,可以使用算法来确定由捕获设备103捕获的驾驶员102的闭眼是否可能与可接受的(例如,
在特定的行为阈值下睁开眼睛或者眨眼)或不可接受的(例如,闭眼时间超过行为阈值水平)驾驶员行为关联。
40.虽然可以捕获驾驶员的动作和/或音频进行分析以识别驾驶员行为,但也可以捕获及收集附加信息。所述附加信息可以包括但不限于驾驶员历史记录、路线制定及路线选择信息。识别的行为可用于生成初始或基准驾驶员配置文件以及生成历史配置文件,其中,所述历史配置文件中的数据是在预定时间段内收集的。在一个实施例中,所述附加信息包括所述驾驶员当前驾驶所述车辆101的上下文或环境。例如,驾驶车辆的上下文或环境可以被定义为驾驶员正在驾驶的当前状况的集合。所述状况可以包括驾驶员在道路上行驶的时间长度(例如,当前行驶的小时数)、驾驶员上次睡觉到现在的时间长度、天气状况、温度、行驶方向、太阳位置、路况、日期和白天/晚上、交通状况,和/或与驾驶员行为相关和/或可能影响驾驶员行为的任何其它当前状况,包括任何上述状况的历史集合。可以在预定时间段内为某个地理区域或路线的单个驾驶员和/或任意数量的驾驶员(例如,驾驶员的众包或集合)收集此信息。相应地,还可以捕获及收集所述道路上其它驾驶员的疲劳,作为整体疲劳检测和分析的一部分。
41.在一些实施例中,检测到的驾驶员行为是与疲劳或困倦或入睡相关的行为。可以通过过度打哈欠、眨眼和/或点头等动作来指示这些驾驶员行为。在一些实施例中,所述驾驶员行为是主动行为(与疲劳相关行为相反),例如,发短信、发邮件、使用手机或平板电脑、吃东西、阅读、交谈等。例如,可以通过驾驶员的凝视方向、眼睛和/或视网膜运动,例如,从道路到设备的来回看,与触摸或键盘交互一致的手指/手部运动,以及头部转动、例如,交替地朝向道路和朝向设备等,来指示与驾驶员与设备的交互一致的运动/位置。
42.在一个实施例中,所述驾驶员行为检测器105可以包括用于实现驾驶员行为检测的运行软件的硬件和/或固件。在一些实施例中,所述驾驶员行为检测器105可以实施为车辆(未示出)或处理器108的车载计算机的一部分。在其它实施例中,所述捕获的驾驶员运动和相关音频数据,以及可选地,所述附加信息中的至少一些经由网络(未示出)从车辆传输到外部计算机或处理器。在一些实施例中,驾驶员行为检测的一部分,例如,运动检测、图像处理、和/或行为识别、分类和检测可以由所述车辆101中的所述疲劳检测器106实现,而驾驶员行为检测器的其它部分,例如对已处理数据的分析,可以由外部处理器通过网络实现。
43.输入/输出接口110允许使用各种输入/输出设备向用户和/或其它组件或设备呈现信息。输入设备的示例包括键盘、麦克风、触摸功能(例如,用于检测物理触摸的电容或其它传感器)、摄像机(例如,其可采用可见或不可见波长,例如,红外频率,来将运动识别为不涉及触摸的手势)等。输出设备的示例包括显示设备114、扬声器等。在一个实施例中,所述i/o接口110从所述捕获设备103接收所述驾驶员102的驾驶员运动数据和/或音频数据。例如,所述驾驶员运动数据可以与所述驾驶员102的眼睛和面部相关,这些可由所述处理器108分析。
44.在一个示例实施例中,闭眼的提取和测量由所述处理器108确定。例如,所述处理器108可以通过一次或多次闭眼测量使用所述驾驶员102的配置文件107确定所述驾驶员102在当前时间段的眼睛闭合率。在该示例中,所述眼睛闭合率指示在当前时间段中测量的所述驾驶员102的闭眼与基准状态(例如,驾驶员眼睛闭上或睁开的状态)期间从所述驾驶员102的所述配置文件107检索出的驾驶员102闭眼的比值。然后,可以将眼睛闭合率归一
化,可以由所述处理器108确定闭眼的百分比值,并且可以在一段时间内重复该过程。然后,可以将所述测量与例如在驾驶员102的配置文件107中的存储值进行比较,以确定所测量的闭眼是否指示所述车辆101的所述驾驶员102处于疲劳或困倦状态。在一个实施例中,所述处理器108继续进行测量,直到车辆关闭或驾驶员102以其它方式完成驾驶,例如,通过离开所述车辆101。
45.所述疲劳检测器收集的数据可以存储在数据库118、存储器112或其任意组合中。在一个实施例中,所述收集的数据来自车辆101外部的一个或多个源。所述存储的信息可以是与驾驶员行为和安全相关的数据,例如,由所述捕获设备103捕获的信息。在一个实施例中,存储在所述数据库118中的数据可以是为所述车辆101和/或其它车辆收集的数据的集合。在一个示例中,所收集的数据可以提供实时收集的当前数据,并且可以包括当前配置文件数据以及与驾驶员行为和安全相关且有用的其它数据。在另一个实施例中,所收集的数据可以提供历史数据或信息,例如,驾驶历史、驾驶疲劳数据、历史配置文件数据以及过去和/或一段时间内所收集的与驾驶员行为和安全相关且有用的其它数据。在一个实施例中,所述驾驶历史可以作为所存储的配置文件107的一部分包括在内。在另一实施例中,所收集的数据可以是当前在特定路线或实时指示所收集数据的地理区域驾驶的一个或多个驾驶员的当前数据。
46.驾驶员历史可以包括关于所述驾驶员102和/或其它车辆的驾驶员的历史数据。例如,驾驶员的历史记录可以包括多年经验、经验类型、交通事故历史记录、就业人员记录中的项、超速和/或其它交通违规历史记录、各种驾驶员行为的先前已识别的事件的数量、严重程度和持续时间。如上所述,所述系统可以收集并存储用于一个或多个特定驾驶员的驾驶配置文件(例如,配置文件107),作为驾驶员历史的一部分。例如,所述驾驶员配置文件可以包括驾驶员加速或减速的速度、特定驾驶状况下的通常速度,例如,夜间驾驶、雨中或雪中驾驶等,驾驶员突然转向或越过中心线的频率等。在一个实施例中,所述驾驶员历史信息可以从外部数据库,例如,驾驶员保险公司的数据库,中检索得到。
47.所述驾驶历史还可包括关于所述车辆101的驾驶员或其它车辆的驾驶员已经疲劳驾驶的一个或多个行驶路线的信息。在一些实施例中,关于一个或多个行驶路线的信息还可以包括道路配置文件、道路拓扑、与行驶路线相关联的停车点的数量、与行驶路线相关联的拐弯的数量等。
48.在一个实施例中,所述存储器112可以存储所述处理器108可执行的指令、机器学习引擎109以及处理器108可加载以及可执行的程序或应用(未示出)。在一个实施例中,所述机器学习引擎109包括存储在所述存储器112中的可由所述处理器108执行的可执行代码,并选择一个或多个存储在所述存储器112(或数据库118)中的机器学习模型,例如行为模型。可以基于可接受的以及不可接受的驾驶员行为(例如,驾驶员身体位置),并使用从所述车辆101和/或其它车辆收集的当前和历史数据和与驾驶员行为或历史记录有关的任何附加信息来开发所述行为模型。可以使用下文更详细地描述的公知的和传统的机器学习和深度学习技术,例如,卷积神经网络(convolutional neural network,cnn)的实现,开发诸如驾驶员的身体位置等的可接受的和不可接受的驾驶员行为的模型。
49.在一个实施例中,所述车辆101和所述疲劳检测器106直接与所述导航系统120连接,所述导航系统120可以在所述显示器114上显示信息(并提供声音)。例如,在一个实施例
中,所述导航系统120可以提供路径规划提示、路线选择信息、重新路线选择信息,地图、驾驶指令等。
50.在一个实施例中,所述导航系统120包括地图服务120a、路线选择服务120b、交通服务120c和地图数据库120d,它们一起收集和提供导航信息。所述地图服务120a提供路线制定数据和相关信息,例如,兴趣点(point of interest,poi),包括但不限于加油站、医院、咖啡店、休息站等。所述路线选择服务120b提供用于计算导航路线的路线选择引擎。所述交通服务120c提供沿路线的交通更新和状况。
51.所述导航信息可以存储在地图数据库120d中。在一个实施例中,所述地图数据库120d存储地图数据,包括历史数据、当前数据和在线地图数据中的至少一个。在另一个实施例中,所述数据库118和所述地图数据库120d可以是单个数据库。所述地图数据库120d还可以包括除所述导航系统120中的其它组件提供的信息之外的信息。例如,可存储车道记录以提供沿所述路线的道路或行驶路段的车道信息。在一个实施例中,所述车道信息可以包括车道数、车道的尺寸、车道的行进方向和/或任何其它车道属性或特征。在另一个示例中,附加信息可以包括速度限制记录,其包括与道路或行驶段的速度限制相关的信息。在一个实施例中,速度限制信息可以包括实际速度限制以及适用所述速度限制的状况或准则。例如,可以根据一天的时间、车辆类型、天气状况等指定不同的速度限制。
52.在一个实施例中,所述地图数据库120d可以存储与poi及其相应位置相关的信息。在另一实施例中,所述地图数据库120d包括与诸如城市、城镇或其它社区等地方以及诸如水体、山脉等其它地理特征相关的数据。
53.一般而言,导航信息包括但不限于与路线、公共空间(公园、图书馆等)、地理区域(城镇、行政区、城市街区等)、poi(餐馆、购物等),以及其它类似的导航信息。可以收集此类信息作为导航信息或作为对现有信息的补充,还可以包括众包数据、网络信息、公共数据库、公共信息(公共交通时刻表等)和其它类似信息。在一个实施例中,导航信息还可以包括许多形式,包括与路线信息、位置、徽标、视觉图像、缩写以及可以指示导航信息的其它类似形式相关的注释。
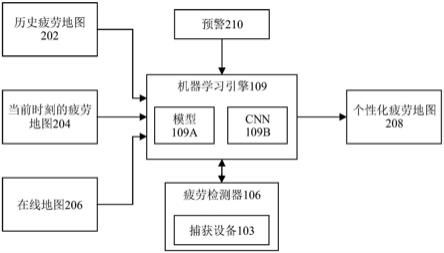
54.图2a示出了机器学习引擎生成个性化疲劳地图的示例实施例。所述机器学习引擎109基于三个输入:历史疲劳地图(hfmap)202、当前时刻的动态(或当前)疲劳地图(mfmap)204和在线地图206,中的至少一个预测驾驶疲劳。可以使用诸如maps、maps等应用程序生成在线地图。在一个实施例中,也可以将所述疲劳检测器106收集的信息,包括由所述捕获设备103捕获的图像和/或声音,输入到所述机器学习引擎109中。基于从各种地图202至206和所述疲劳检测器106(包括所述捕获设备103)获取的信息,所述机器学习引擎109预测驾驶疲劳(例如,所述车辆101中的所述驾驶员102的疲劳),并生成例如可以在所述显示器114上显示给所述驾驶员102的个性化疲劳地图(pfmap)208。在一个实施例中,在所述驾驶员102的移动设备上显示所述pfmap 208。在另一实施例中,所述pfmap 208可以以可视化的方式、可听的方式或其组合的方式向驾驶员提供预警(或提醒)210。例如,所述系统100可以预警或通知驾驶员“立即绕行”,同时显示指示所述驾驶员离开当前路线的可视化绕行箭头。在另一个实施例中,所述系统100可以通知或预警所述驾驶员102在指定距离内且被识别为疲劳的其它疲劳驾驶员。例如,响应于识别到沿相同路线的相邻车道的车辆中的疲劳驾驶员,所述系统100可以通知所述驾驶员“立即前往右侧车道”,同时显示移动到
右侧车道的可视化箭头。
55.图2b示出了所述在线地图206的示例实施例。所述在线地图206可显示有街道、公路、诸如河流等的地理特征以及诸如餐馆、商店、休息站、机场、高尔夫球场、大学等的其它大型地标。典型地,这种地图还可包括地图上显示的区域的名称,例如,住宅区、工业园区等。特别地,示例图中的所述在线地图206示出加利福尼亚州,并标注有从洛杉矶(途经点1)到门多西诺(途经点2)的路线220,以及若干个指示所述路线220沿途的施工点的标签或图标222。在一个实施例中,所述在线地图206由所述导航系统120生成。
56.图2c示出了所述mfmap 204的示例实施例。在一个实施例中,所述在线地图206可用作所述mfmap 204的基础层。因此,所述mfmap 204可以显示与所述在线地图206中描述的特征相同或相似的特征。例如,显示有从洛杉矶(途经点1)到门多西诺(途经点2)的标注有图标222的路线220。在一个实施例中,所述mfmap 204包括附加层,例如,驾驶员行为层,其可在所述mfmap 204上显示驾驶员行为。例如,所述驾驶员行为层可以附加地显示沿所述路线220识别驾驶疲劳的区域或路段220a(也可以被识别为沿所述路线的灰色路段),例如,一个或多个疲劳的驾驶员220b(也可以被识别为沿所述路线的一个或多个面部图标)。
57.所述驾驶员行为层可用于在任何时刻沿所述路线220显示检测到的驾驶员行为。在一个实施例中,用于检测驾驶员行为(例如,驾驶疲劳)的因素可以包括交通、个性化驾驶记录(例如,驾驶习惯、睡眠量等)、道路场景(例如,直行道、天气、一天的时间等)等等。在一个实施例中,所述mfmap 204显示在特定时刻或实例沿所述路线220的驾驶员行为的当前状态。例如,所述mfmap 204可以显示在2019年10月17日上午10:00的当前驾驶员行为(例如,驾驶疲劳)。在此上下文中的当前驾驶员行为可能意味着过去的时刻(例如,历史驾驶疲劳),实时的时刻(例如,当前驾驶疲劳)或预测的未来时刻(例如,预测的驾驶疲劳)。
58.在另一个示例实施例中,图2d示出了hfmap 202。在一个实施例中,所述在线地图206可用作所述hfmap 204的基础层,类似于所述mfmap 204。如图所示,所述地图显示有从洛杉矶(途经点1)到门多西诺(途经点2)的所述路线220,并标注有图标222、区域或路段220a以及一个或多个疲劳的驾驶员220b。与所述mfmap 204不同的是,所述hfmap 202显示有在预定义时间段内收集的历史驾驶员行为,例如,疲劳驾驶员行为。例如,可以由所述疲劳检测器106收集从2018年9月1日至2018年9月30日之间或2018年10月17日上午10:00至下午5:00之间的疲劳的驾驶员的历史数据,并存储在数据库118中。
59.返回图2a,在将所述在线地图206、所述mfmap 204和所述hfmap 206输入所述机器学习引擎109之前,对模型109a进行训练以理解如何分类和识别相关信息。例如,可以对模型109a进行训练以理解驾驶员的识别为疲劳驾驶的图像、动作或声音。同样地,可以使用没有被识别为疲劳驾驶的图像、动作或声音来训练相同的模型,以防止或避免被认为是驾驶疲劳的各种动作。
60.如本领域技术人员所理解的,所述机器学习引擎109本身可以具有许多不同的形式,例如,受监督的或无监督的学习技术。此外,所述机器学习引擎109可以使用诸如线性计算和非线性计算等的其它函数以及诸如卷积神经网络(convolutional neural network,cnn)、递归神经网络(recurrent neural network,rnn)、多线性计算等的深度学习方法执行计算。出于讨论的目的,所述机器学习引擎109是深度学习引擎,包括卷积神经网络(cnn)109b。在一个实施例中,对所述cnn 109b进行训练以生成行为模型以理解驾驶员行为。所述
cnn 109b包括多个层,每个层可以是不同类型的层。这些不同类型的层可以包括例如卷积层、池化层、归一化层和完全连接层。在一个实施例中,所述cnn109b分析输入数据(在这种情况下,所述在线地图、所述mfmap和hfmap数据以及由所述疲劳检测器106收集的数据)并被训练以执行想要的分析,其中,对训练数据的集合(例如,输入数据的子集)进行训练。所述cnn 109b基于所述训练数据的集合和所获得的结果“学习”所述分析。例如,所述训练数据集合可以包括已由所述系统100(图1)中的相应组件收集和/或存储的或从诸如驾驶员行为数据的数据库等的其它源检索得到的当前地图数据、历史地图数据、驾驶疲劳数据(例如,历史疲劳数据和当前疲劳数据)等的子集。可以这样分析所收集的当前地图数据、历史地图数据和驾驶疲劳数据的子集,使得所述cnn 109b训练所述行为模型以理解特定的驾驶员行为,特别是与驾驶疲劳相关的行为,训练时通过输入数据进行识别。
61.一旦训练好,所述模型109a可以使用所收集的数据,例如所收集的地图数据(包括历史数据和当前数据)、驾驶疲劳数据等作为输入,以生成和输出所述个性化疲劳地图(pfmap)208,如图2e所示。
62.所述pfmap 208是所述车辆101的所述驾驶员102的个性化地图。除了提供典型的路线制定和/或导航信息之外,所述pfmap 208还提供关于替代路线226(显示为虚线)推荐内容或建议以在所述疲劳检测器106检测到驾驶疲劳的情况下更改(例如,重新选择)所述路线。在一个实施例中,当在所述车辆102的所述驾驶员102周围或附近的其它车辆(相邻车辆)中检测到驾驶疲劳时,提供所述推荐内容或建议。所述pfmap 208还可包括风险数据,包括分心驾驶或醉酒驾驶,其可作为所显示地图的一部分而被指示。
63.在一个实施例中,在所述车辆101中的显示器114上显示所述pfmap 208,并且所述pfmap 208包括地图上的一个或多个位置的一个或多个可视化指示228,所述一个或多个位置被确定为所述驾驶员102的有效休息点。可以通过所述在线地图206的附加层来显示所述位置的所述替代路线226和所述可视化指示228。例如,重新路线选择层可以提供替代路线226,个性化层可以提供为了让驾驶员休息而将驾驶员的线路重新选择到的位置的可视化指示226。在一个实施例中,可在疲劳之前将所述替代路线226提供给所述驾驶员102。例如,所述pfmap 208上的路线段可以显示已知的会引起驾驶疲劳的区域。在所述车辆101到达该路线段之前,可以在显示器114上显示所述替代路线226,或者可以更新路线220以用替代路线段替换当前路线段(更改或重新选择所述路线)。
64.在一个示例中,所述在线地图206可用作所述pfmap 208的基础层,类似于所述mfmap204和所述hfmap 206。除了所述路线220、所述图标222、所述区域或路段220a和一个或多个疲劳的驾驶员220b之外,所述pfmap 208还包括附加路线段(例如,替代路线226),该路线段将所述驾驶员的线路重新选择到休息点228,例如,咖啡店。在一个实施例中,可基于所述车辆101的所述驾驶员102的驾驶疲劳和/或基于驾驶疲劳和由所述在线地图202、所述mfmap 204和所述hfmap 206提供的信息的组合来计算或选择所述替代路线226。在一个实施例中,检测到的疲劳程度将确定建议路线或替代路线,如下文进一步解释的。在一些实施例中,所述检测到的驾驶疲劳程度可使所述车辆101的线路自动被重新选择。在一个实施例中,可以根据疲劳分数或疲劳评分量表来测量所述疲劳的程度,如下所述。
65.图3a示出了生成和更新个性化疲劳地图的示例流程图。在实施例中,所述流程图可以是计算机实现方法,所述方法至少部分由各种附图中示出的并且如本文所描述的硬件
和/或软件组件执行。在一个实施例中,所公开的流程可以由所述系统100执行,特别是由所述疲劳检测器106和所述导航系统120执行,或者由图6中公开的系统执行。在一个实施例中,该过程的至少一部分由通过一个或多个处理器,例如,处理器109或处理器602,执行的软件组件执行。
66.该过程开始于步骤302:所述导航系统120加载在线地图202,并且所述车辆101的所述驾驶员102选择路线。在一个实施例中,如本领域技术人员所理解的,路线选择可以包括:所述驾驶员101将目的地输入到所述导航系统120。在加载所述在线地图202时,可启动或激活所述系统100以进行疲劳检测和分析。所述系统100的启动或激活使得所述hfmap 206和所述mfmap 204中的至少一个分别在步骤304和306被加载。在一个实施例中,如果所述数据库118中存在所述hfmap 206和/或所述mfmap 204,则可以加载所述地图以供所述系统100使用。在另一实施例中,如果所述数据库118中不存在所述hfmap 206和所述mfmap204中的任一个或不存在所述hfmap 206和所述mfmap 204,则可由所述系统100创建所述地图。
67.在一个实施例中,参考图3b,可以使用路线规划策略创建所述hfmap 206和所述mfmap204。在所述路线规划策略中,沿着路线的分段收集和测量驾驶员行为数据以创建所述hfmap206和所述mfmap 204。在一个实施例中,出于讨论的目的,收集的驾驶员行为数据包括持续时间(例如,1年、3周、2小时)、用户数量(例如,100万)、道路场景(例如,高速道路、长道路、直道路)、疲劳时间(一天中不同的时间)、疲劳持续时间(例如,节假日或工作日)、气候(例如,雾、雪、风、雨)和长期驾驶模式等因素。所述长期驾驶模式可包括以下因素:在深夜、清晨或午后驾驶、不间断持续时间、服用药物、毒品或酒精、或其它睡眠障碍或因素。可以沿着路线的一个或多个路段测量和计算这些因素,并用于预测和确定可应用于地图的驾驶疲劳程度(或疲劳分数)。
68.在图3b的实施例中,所述路线220包括节点(途经点1和途经点2)或目的地i、j、k和q以及形成在节点或目的地之间的路线段1至9。在本发明的上下文中,术语节点和目的地可以作为同义词使用,并且包括起始节点、结束节点和任何中间节点。所述目的地i、j、k和q可以是地图上已经被指定或可能被指定为所述路线220上的起点、停车点或终点的任何点,并且不限于最终目的地,例如,终点节点(途经点2)。如图所示,所述路段1至9中的每一个连接在第一节点(途经点1或途经点2)或目的地i、j、k或q和第二节点(途经点1或途经点2)或目的地i、j、k或q之间,并且表示距离。
69.继续参考图3b,为了确定每个路段1至9的疲劳程度(或疲劳分数),沿着所述路线220的一个或多个路段1至9收集和测量所述因素。在一个实施例中,所述因素可以表示为历史数据的参数集。在另一实施例中,所述因素可以表示为当前数据的参数集。在又一实施例中,所述因素可以表示为个性化数据的参数集。
70.应理解,历史数据、当前数据和个性化数据的收集可以是迭代过程,其中连续测量所述历史数据、当前数据和个性化数据,计算疲劳程度并更新地图。连续可能意味着不停止(持续不断的),或者在设定的时间或间隔,或者随机。此外,可以在同一时间或时间间隔内收集和测量所述历史数据、当前数据和个性化数据,也可以设置为在不同时间或时间间隔内收集和测量所述历史数据、当前数据和个性化数据。例如,历史数据可以每周收集和测量,而当前数据和个性化数据可以持续且实时地收集和测量。
71.在为所述hfmap 206收集历史数据时,所述参数集包括以下因素:w1:持续时间,w2:
用户数,w3:道路场景,w4:疲劳时间,w5:疲劳持续时间,w6:气候以及w7:所有驾驶员长期驾驶模式。为了确定所述hfmap 206中的路段的疲劳程度,使用所述参数集中的因素根据以下公式计算疲劳分数s1:
72.其中
73.i,j为路线段1至9的起始点(途经点1)和结束点(途经点2),n为路段的编号,d
ij
(
·
)为<i,j>的欧几里德长度,是最佳距离,||
·
||
f
为f范数。
74.在所述mfmap 204的情况下,所述参数集包括当前数据的因素。为当前数据所采集的因素与为历史数据所采集的因素相同,但持续时间(w1)除外。因此,用于计算所述mfmap 204中的路段的疲劳程度s2的参数集包括以下因素:w2:用户数,w3:道路场景,w4:疲劳时间,w5:疲劳持续时间,w6:气候以及w7:所有的驾驶员长期驾驶模式。为了确定所述mfmap 204中的路段的疲劳程度,使用所述参数集中的因素根据以下公式计算疲劳分数s2:
75.其中,
76.i,j为路线段1至9的起始点(途经点1)和结束点(途经点2),n为路段的编号,d
ij
(
·
)为<i,j>的欧几里德长度,是最佳距离,||
·
||
f
为f范数。
77.在一个实施例中,当没有创建所述pfmap 208时,可以使用所述hfmap 204和所述mfmap 206(和在线地图202)通过上述机器学习引擎109(图1)为所述车辆101的所述驾驶员102创建初始pfmap 208。在另一个实施例中,可从数据库118或一些其它外部数据源检索得到所述初始pfmap 208。
78.在另一实施例中,当已经创建有所述pfmap 208时,可以计算路线220中每个路段1至9的疲劳程度(或分数)。为所述个性化数据所收集的因素与为所述当前数据所收集的因素相同,但用户数(w2)除外。因此,用于计算所述pfmap 208中路段的疲劳程度s3的参数集包括以下因素:w3:道路场景,w4:疲劳时间,w5:疲劳持续时间,w6:气候以及w7:所有驾驶员长期驾驶模式。为了确定所述pfmap 208中的路段的疲劳程度,使用参数集中的因素根据以下公式计算疲劳分数s3:
79.其中
80.i,j为路线段1至9的起始点(途经点1)和结束点(途经点2),n为路段的编号,d
ij
(
·
)为<i,j>的欧几里德长度,是最佳距离,||
·
||
f
为f范数。
81.返回图3a,可以使用三种策略:交通策略、驾驶策略和交互策略,中的至少一个来更新所述地图。在步骤308中,当所述车辆101沿着所述路线220前进时,实施所述交通策略以更新所述pfmap 208。当所述疲劳检测器106检测到所述车辆101的所述驾驶员102疲劳时,在步骤310中,所述系统100将计算到位置(例如,休息点或咖啡店)的距离,并使用以下目标函数更新所述pfmap 208:
82.其中,
83.α,β,γ,δ分别是s0,s1,s2,s3的权重,s0是在线地图202的最优欧几里得距离,该距离实时体现在线地图202的交通信息。可以为每个疲劳分数s0,s1,s2,s3分配权重,以便减少或增加特定疲劳程度的影响。例如,如果所述疲劳分数s1比所述在线地图疲劳分数s0对目标函数(4)的影响更大,则为其分配更大的权重(例如,α小于β)。
84.在一个实施例中,所述计算的疲劳分数可以存储在数据库118中,用于确定所述历史疲劳数据(包括历史疲劳的历史数据)。
85.当所述车辆101的所述驾驶员102在所述路线220上,可以在步骤312中实施驾驶策略以更新所述pfmap 310。在一个实施例中,所述驾驶策略可以结合所述交通策略实施。当所述疲劳检测器106检测到所述驾驶员102疲劳时,所述导航系统120将发出预警210(图2)和/或提供替代路线226(图6),在所述替代路线中,将所述车辆101的线路重新选择到被确定为有效休息点的位置。
86.在一个实施例中,所述驾驶疲劳的程度决定所述系统100如何响应检测到的驾驶疲劳。例如,对于疲劳程度较低的驾驶员102,可以仅由所述导航系统120发出(可视化的和/或可听的)预警210,而对于疲劳程度较高的驾驶员102,所述导航系统120可以发出预警210,并将所述驾驶员102的线路重新选择到替代路线226。
87.在所述pfmap 208的情况下,如上所述,可以使用因素w3至w7和等式(3)确定或测量路线220的每个路段的驾驶疲劳的程度。在一个实施例中,处理器108可包括计算机可执行算法,所述计算机可执行算法用于基于所述因素w3至w7和所述等式(3)确定驾驶疲劳的程度,并输出疲劳分数s3。所述输出的疲劳分数s3可以指示所述驾驶员102是否过于疲劳或劳累而无法驾驶,或者可以是与驾驶员102的当前疲劳程度有关的其它指示。例如,所述驾驶疲劳的程度可以基于0
‑
3的评级或评分量表,其中,“0”是“清醒”状态,且是最低的疲劳程度,“1”是“轻微劳累”状态,“2”是“熟睡”状态,“3”是“完全睡眠”状态,且是最高的疲劳程度。也可以使用其它疲劳评分量表和评级系统。
88.在一个示例中,并且出于讨论的目的,所述导航系统120提供预警210并显示替代路线226。在一个实施例中,参考图4b,在检测到驾驶疲劳时,由处理器108执行的算法或指令可以被配置为如下:
89.如果当前驾驶员的疲劳程度大于等于3,则
90.·
如果存在自动驾驶模式,则
91.·
切换到自动驾驶模式
92.否则【驾驶员的疲劳程度小于3或无自动驾驶模式】
93.·
更新个性化疲劳地图
94.·
更改前往当地的路线,保持用于提醒休息或喝咖啡的预警
95.·
更新行驶路线
96.·
更新mfmap和hfmap
97.驾驶疲劳的程度根据疲劳分数{0,1,2,3}测得,分别对应{清醒、轻度睡眠、熟睡、完全睡着}。应理解,可以在所述算法/指令中调整所述疲劳程度。
98.根据所述算法或指令,当所述当前驾驶员的疲劳程度的疲劳分数s3大于或等于3,且所述车辆101能够自动驾驶时,所述车辆101被置于自动驾驶模式,并经由所述替代路线226前进到指定的休息点。所述车辆101也可以提供预警210和可视化指示。
99.如果所述当前驾驶员的疲劳程度的疲劳分数s3小于2(或者所述疲劳分数大于等于3且所述车辆没有自动驾驶模式),则所述车辆101可以执行以下操作中的一个或多个:更新所述pfmap 208,将所述路线更改为替代路线并提醒驾驶员休息,以及更新所述行驶路线。例如,参考图4a,对于较高的疲劳分数,例如,疲劳分数s3为3,可以提示所述系统100显
示“!!预警!!驾驶疲劳”“前进至高亮显示路线”,并在显示器114上规划路径至最近的位置(例如,最近的休息点)。对于较低的疲劳分数,例如,疲劳分数s3为1,可以提示所述系统100仅向所述驾驶员102提供可听的预警,例如,“保持清醒!”。
100.在另一示例中,参考图4b,所述导航系统120提供预警210并推荐替代路线226。与所述第一示例类似,在检测到驾驶疲劳时,所述处理器108执行的算法或指令可以被配置为如下:
101.如果疲劳程度大于0且小于3,则
102.·
更新个性化疲劳地图
103.·
建议更改路线到当地休息点
104.·
添加可听预警
105.·
更新mfmap和hfmap
106.如果疲劳程度大于等于3,
107.·
切换到自动驾驶模式
108.否则
109.·
更新个性化疲劳地图
110.驾驶疲劳的程度根据疲劳分数{0,1,2,3}测得,分别对应{清醒、轻度睡眠、熟睡、完全睡着}。应理解,可以在所述算法/指令中调整所述疲劳程度。
111.根据所述算法或指令,当当前驾驶员的疲劳程度的疲劳分数s3大于0或小于3时,所述系统100更新所述pfmap 208以建议将所述路线更改为替代路线。例如,参考图4b中所示的驾驶员视图,更新所述pfmap 208以包括替代路线226。可以将所述替换路线226显示给所述驾驶员102作为推荐内容,以行驶到当地休息点而不是继续沿着所述路线220前行。在一个实施例中,所述系统100还提供可听预警(例如,“小心,前往最近的咖啡店休息”)和/或更新所述mfmap 204和所述hfmap 202(如下文讨论的交互策略)。
112.如果所述当前驾驶员的疲劳程度的疲劳分数s3大于3时,则所述车辆101被置于自动驾驶模式并经由替代路线226前进到指定的休息点。所述车辆101也可以提供预警210和可视化指示。否则,所述车辆101根据所述驾驶策略更新所述pfmap 208,如上所述。
113.返回图3a,可以在步骤314中实施交互策略。在一个实施例中,所述交互策略使用由每个驾驶员车辆中的所述系统100收集的所有驾驶员行为数据和/或由相应车辆的驾驶员主观上报的所有驾驶员行为数据。如上所述,可以收集、测量和存储所述驾驶员行为数据(包括主观上报的数据),以创建每个驾驶员的历史疲劳地图、当前时刻的动态疲劳地图和个性化疲劳地图。主观上报的驾驶员行为可以包括所述驾驶员上报的但所述系统100无法检测到的评论或数据。例如,所述系统100可能无法检测驾驶员在开始沿着路线行驶之前的睡眠量,除非所述驾驶员上报了睡眠量。类似地,所述系统100可能无法检测驾驶员的醉酒程度,除非所述驾驶员上报了醉酒程度。在一个实施例中,主观上报的驾驶员行为可作为存储为配置文件107的驾驶员配置文件的一部分而包括在内。
114.在一个示例中,且出于讨论的目的,在检测到一个或多个附近或相邻车辆中的驾驶疲劳时,所述导航系统120提供预警210和/或显示替代路线226。附近或相邻车辆可以包括但不限于驾驶员附近车辆(例如,预定距离内的车辆),例如相邻车道的车辆、在同一车道上所述车辆后面或前面的车辆、或当前路线段的车辆,其中,由于驾驶员的行为,如检测到
的疲劳,所述车辆可能对当前驾驶员构成安全风险。在一个实施例中,所述处理器108执行的算法或指令可以如下配置以实现交互策略:
115.如果相邻驾驶员的疲劳程度大于1,则
116.使用参数集和等式(1)更新mfmap,以及
117.使用参数集和等式(3)更新hfmap。
118.驾驶疲劳的程度根据疲劳分数{0,1,2,3}测得,分别对应{清醒、轻度睡眠、熟睡、完全睡着}。应理解,可以在所述算法/指令中调整所述疲劳程度。
119.根据所述算法或指令,当一个或多个相邻驾驶员的疲劳程度的疲劳分数s3大于1时,所述系统100使用所述算法或指令通过相应的参数集和目标函数(例如,等式1或3)更新所述mfmap 206和所述hfmap 204。
120.在一个实施例中,在更新所述hfmap 206和所述mfmap之后,更新所述pfmap 208并发布关于更改车道或路线的推荐内容,其可以包括可视化和/或可听的预警。在一个实施例中,处理器108执行的算法或指令可以如下配置以实现交互策略:
121.如果相邻驾驶员的疲劳程度大于1,则
122.更新mfmap和hfmap;
123.更新pfmap;
124.推荐一个车道或改道,以避开疲劳区域;以及
125.提供可听预警。
126.否则
127.更新pfmap。
128.驾驶疲劳的程度根据疲劳分数{0,1,2,3}测得,分别对应{清醒、轻度睡眠、熟睡、完全睡着}。应理解,可以在所述算法/指令中调整所述疲劳程度。
129.例如,结合图5所示的驾驶员视图,当一个或多个相邻驾驶员502的疲劳程度大于1时,更新所述mfmap 206和所述hfmap 204。然后更新所述pfmap 208以包括替代路线226。将所述替换路线226显示给所述驾驶员102,作为沿所述路线220前进到另一车道的推荐内容,以避开所述一个或多个相邻的疲劳驾驶员502。在一个实施例中,所述系统100还提供可听预警(例如,“注意,该区域中有6个疲劳驾驶员”)。
130.如果所述一个或多个相邻驾驶员的疲劳程度的疲劳分数s3小于1时,则所述车辆101根据所述交通策略、所述驾驶策略和/或所述交互策略更新所述pfmap 208,如上所述。
131.图6示出了可实施本发明实施例的计算系统。可以对计算系统600进行编程(例如,经由计算机程序代码或指令)以通过如本文所述的驾驶员行为检测增强驾驶员的安全性,所述计算系统600包括通信机制,例如总线610,用于在计算系统600的其它内部和外部组件之间传递信息。在一个实施例中,所述计算系统600是图1的系统100,所述计算系统600或其一部分构成用于执行一个或多个步骤的装置,所述一个或多个步骤用于通过所述驾驶员行为检测增强驾驶员的安全性。
132.所述总线610包括一个或多个并联的信息导体,使得信息在耦合到所述总线610的设备之间快速传输。用于处理信息的一个或多个处理器602与所述总线610耦合。
133.根据相关的计算机程序代码,所述一个或多个处理器602对信息(或数据)执行一组操作,以通过驾驶员行为检测增强驾驶员的安全性。所述计算机程序代码是指令或语句
的集合,用于指示所述处理器和/或所述计算机系统进行操作以执行指定功能。例如,所述代码可以用计算机编程语言进行编写,所述计算机编程语言被编译成所述处理器的本地指令集。也可以直接使用本地指令集(例如,机器语言)来编写代码。所述操作集包括从所述总线610传入信息并在总线610上传输信息。通过诸如一个或多个数字的操作代码等的指令信息将可以由所述处理器执行的操作集合中的每个操作指示给所述处理器。所述处理器602将要执行的操作的序列,例如,操作代码序列,构成处理器指令,也称为计算机系统指令,或简单地说,计算机指令。
134.所述计算系统600还包括耦合到所述总线610的存储器604。所述存储器604,例如,随机存取存储器(random access memory,ram)或任何其它动态存储设备,存储包括处理器指令的信息,所述处理器指令用于通过驾驶员行为检测增强驾驶员的安全性。动态存储器允许所述计算系统600更改其中存储的信息。ram允许存储于称为内存地址的位置上的信息单元独立于相邻地址的信息进行存储和检索。所述存储器604还用于所述处理器602在执行所述处理器指令时存储临时值。所述计算系统600还包括只读存储器(read only memory,rom)606或耦合到所述总线610以用于存储静态信息的任何其它静态存储设备。所述总线610还耦合有非易失性(持久)存储设备608,例如磁盘、光盘或闪存卡,用于存储包括指令的信息。
135.在一个实施例中,从诸如由人类用户操作的键盘、麦克风、红外(infrared,ir)遥控器、操作杆、游戏板、触笔、触摸屏、头戴式显示器或传感器等的外部输入设备612将包括指令的信息提供给所述总线610以供所述处理器使用,所述指令用于通过驾驶员行为检测增强驾驶员的安全性的。传感器检测其附近的状况,并将这些检测转换成与用于表示计算系统600中的信息的可测量现象兼容的物理表达。耦合到所述总线610的主要用于与人类交互的其它外部设备包括:用于呈现文本或图像的显示设备614;用于控制呈现在所述显示器614上的小光标图像的位置,并发出与呈现在所述显示器614上的图形元素相关联的命令的定点设备616,例如,鼠标、轨迹球、光标方向键或运动传感器;以及用于捕获、记录和促使存储一个或多个静止和/或移动的还可以包括音频记录的图像(例如,视频或电影)的一个或多个摄像机传感器684。
136.在所示实施例中,将专用硬件,例如,专用集成电路(application
‑
specific integration circuit,asic)620与所述总线610耦合。所述专用硬件用于快速执行处理器602未执行的操作,用于专用用途。
137.所述计算系统600还包括耦合到所述总线610的通信接口670。所述通信接口670与使用自己的处理器进行操作的各种外部设备单向或双向通信耦合。通常,所述耦合是与连接到本地网络680的网络链路678耦合,诸如服务器或数据库等各种外部设备可以连接到所述本地网络680。或者,链路678可以直接连接到互联网服务提供商(internet service provider,isp)684或网络690,例如,互联网。所述网络链路678可以是有线的或无线的。例如,所述通信接口670可以是个人计算机上的并行端口或串行端口或通用串行总线(universal serial bus,usb)端口。在一些实施例中,所述通信接口670是集成服务数字网络(integrated services digital network,isdn)卡或数字用户线(digital subscriber line,dsl)卡或电话调制解调器,其提供到相应类型的电话线的信息通信连接。在一些实施例中,所述通信接口670是电缆调制解调器,其将所述总线610上的信号转换为用于通过同
轴电缆通信连接的信号或转换为用于通过光纤电缆通信连接的光信号。作为另一示例,所述通信接口670可以是局域网(lan)卡,以提供到诸如以太网之类的兼容lan的数据通信连接。也可以实现无线链路。对于无线链路,所述通信接口670发送和/或接收电信号、声信号或电磁信号,包括红外和光信号,所述信号携带诸如数字数据之类的信息流。例如,在诸如像手机之类的移动电话等的无线手持设备中,所述通信接口670包括无线电波段电磁发射器和接收器,称为无线电收发器。在某些实施例中,所述通信接口670能够连接到通信网络,以通过对诸如移动电话或平板电脑等的移动设备的驾驶员行为检测增强驾驶员的安全性。
138.网络链路678通常使用传输介质通过一个或多个网络向使用或处理信息的其它设备提供信息。例如,所述网络链路678可通过本地网络680提供到主机计算机682或连接到由isp操作的设备684的连接。所述isp设备684进而通过现在通常称为互联网690的网络的全球公共分组交换通信网络提供数据通信服务。
139.被称为连接到因特网的服务器主机682的电脑托管一个进程,该进程响应通过因特网接收的信息而提供服务。例如,所述服务器主机682托管一个进程,该进程提供表示视频数据的信息以在显示器614上呈现。可以理解的是,所述系统600的组件可以部署在其它计算机系统(例如,主机682和服务器682)中的各种配置中。
140.本发明的至少一些实施例涉及通过使用所述计算系统600实现本文中描述的一些或全部技术。根据本发明的一个实施例,响应于所述处理器602执行包含在存储器604中的一个或多个处理器指令的一个或多个序列,所述计算系统600执行这些技术。可以从诸如存储设备608或网络链路678的另一计算机可读介质从将这种指令(也称为计算机指令)、软件和程序代码读入存储器604。执行包含在存储器604中的指令序列使所述处理器602执行本文描述的方法步骤中的一个或多个。
141.应理解,本主题可以体现为许多不同的形式且不应被解释为仅限于本文所阐述的实施例。相反,提供这些实施例使得本标的物将是透彻和完整的,并将向本领域技术人员充分传达本发明。事实上,本主题旨在覆盖包括在由所附权利要求书限定的本主题的范围和精神内的这些实施例的替代物、更改和等同物。另外,在以下本主题详细描述中,阐述了许多特定细节以便提供对本主题的透彻理解。然而,所属领域的普通技术人员将清楚,可以在没有这样具体细节的情况下实践本主题。
142.本文参考根据本发明实施例的方法、装置(系统)和计算机程序产品的流程图图示和/或方框图来描述本发明的各方面。可以理解的是,可以通过计算机程序指令实现所述流程图图示和/或方框图的每个方框以及流程图图示和/或方框图中的方框的组合。这些计算机程序指令可以提供给通用计算机、专用计算机或其它可编程数据处理装置的处理器以生产机器,使得经由计算机或其它可编程指令执行装置的处理器执行的指令创建用于实现所述流程图和/或方框图中指定的功能/动作的机制。
143.计算机可读非瞬时性介质包括各种类型的计算机可读介质,包括磁存储介质、光存储介质和固态存储介质,具体不包括信号。应理解,该软件可以安装在该设备中并随该设备销售。可替代地,可以获得所述软件并加载到所述设备中,包括经由光盘介质或从网络或分发系统的任何方式获取软件,包括,例如,从所述软件创建者拥有的服务器或从软件创建者不拥有但使用的服务器获取软件。例如,所述软件可以存储在服务器上,以便通过因特网分发。
144.计算机可读存储介质本身不包括传播信号,且可由计算机和/或处理器访问,包括易失性和非易失性的可移动和/或不可移动的内部和/或外部介质。对于计算机来说,各种类型的存储介质可以容纳以任何合适的数字格式的数据存储。本领域的技术人员应当理解可以使用诸如压缩驱动器、固态驱动器、磁带、闪存卡、闪存驱动器、盒等的其它类型的计算机可读介质存储用于执行所公开架构的新颖方法(动作)的计算机可执行指令。
145.本文中所用的术语仅仅是出于描述特定方面的目的,并且并旨在限制本发明。除非上下文清楚说明,否则本文所用的单数形式“一”和“所述”旨在包括其复数形式。应进一步了解,本说明书中所用的术语“包括”用于说明存在所述特征、整数、步骤、操作、元件和/或组件,但并不排除存在或添加一个或多个其它特征、整数、步骤、操作、元件、组件和/或它们的组合。
146.出于说明和描述的目的而描述本发明,但并不是穷尽性的或限制于以所公开的形式公开的。在不偏离本发明的范围和精神的前提下,多种修改和改变对本领域技术人员而言是显而易见的。选择和描述的本发明各个方面以便更好地解释本发明的原理和实际应用,并且使本领域技术人员能够理解本发明适合预期特定用途的各种修改。
147.出于本文的目的,与所公开技术相关联的每个过程可以由一个或多个计算设备连续地执行。流程中的每个步骤可以由与其它步骤中使用的计算设备相同或不同的计算设备执行,并且每个步骤不必由单个计算设备执行。
148.虽然已经以特定于结构特征和/或方法动作的语言描述了主题,但是应该理解的是,权利要求书限定的主题不必局限于上面描述的具体特征或动作。相反,上述具体特征和动作被公开为实现权利要求的示例形式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。