1.本发明属于汽车设计人机工程技术领域,具体涉及一种基于虚拟现实的汽车人机工程评价方法及评价系统。
背景技术:
2.人机工程是从人的生理和心理特点出发,研究人、机、环境相互关系和相互作用的规律。人机工程研究的对象主要是“人
‑
机
‑
环境”三者之间的关系,人机工程研究的目的主要是为大家提供一个“高效、安全、健康和舒适”的生态系统。
3.汽车“新四化”背景下,汽车的魅点发生重大变化,汽车感知质量的好坏已经成为重要的竞争力之一。这对人机工程的要求也越来越高。人机工程评价主要包括可视性、可达性、舒适性。目前项目早期人机工程评价主要有两种方式,一种是借助数字样机布置百分位假人开展客观评价,另外一种是借助评测人开展竞品车或人机台架对标开展主观评价。这种工作方式下存在着如下问题:
4.1.采用百分位假人开展人机工程评价,无法完全代替所有潜在用户,评价结果是几何尺寸而非用户实践体验的视野、操纵等的真实感觉。这样的评价方式无法达成人机参数最优设定,甚至还会出现设定错误的重大设计问题。
5.2.借助评测人开展竞品车或人机台架开展人机工程评价,由于评价中没有待研车型的详细形体结构,只能作为硬点设定和宏观尺寸定义等输入条件。这样的设计方式下,很难设计出用户极致体验的产品。
6.人机工程的修改代价是昂贵的,如后期评价产品人机工程方面存在问题,往往是颠覆性的修改,将造成开发周期延长、开发成本增长,甚至只能带着问题投放市场。
技术实现要素:
7.本发明的目的是提供一种基于虚拟现实的汽车人机工程评价方法及评价系统,用以设计出满足用户可视性、可达性、舒适性极致体验需求的整车商品。
8.本发明的目的是通过以下技术方案实现的:
9.作为本发明的一方面,提供一种基于虚拟现实的汽车人机工程评价方法,包括以下步骤:
10.步骤一、导入待评价车型的汽车造型模型;
11.步骤二、在所述汽车造型模型基础上创建评价虚拟场景;
12.步骤三、体验用户穿戴沉浸式体验头盔和光学全身动捕设备;
13.步骤四、人机工程评价体验:体验用户分别在评价虚拟场景中对待评价车型进行可视性评价、可达性评价、舒适性评价体验;
14.步骤五、评价打分:体验用户对可视性评价、可达性评价、舒适性评价体验进行打分,并根据打分结果计算整体评价分数;
15.步骤六、最终评价结果处理及决策:处理各类体验用户人群的评价分数,对低分项
进行升级决策,决策后如需要整改则形成整改方案。
16.进一步地,所述步骤四人机工程评价体验中:
17.所述可视性评价时,体验用户在模拟主驾驶位、副驾驶位、后排的座椅上坐下,多次通过沉浸式体验头盔观察车辆a柱、左右后视镜、前发动机盖、雨刷器、hmi显示屏、车窗外部,对所有部件的可视性进行体验;
18.所述可达性评价时,体验用户多次通过沉浸式体验头盔观察手部对方向盘,hmi显示屏、安全带、车门开关拉手、车窗升降键、车窗锁止键、油箱开启键的触达和操控,观察脚部与离合、刹车、油门踏板的踩达和踩下;
19.所述舒适性评价时,体验用户多次通过沉浸式体验头盔观察上下车过程中腿部与门护板、门槛、b柱、门柱、转向护罩的干涉情况,多次观察后排乘客座椅乘坐姿态下腿部与后排空调、前排座椅之间的干涉情况;
20.体验用户进行体验过程中若虚拟人体与评价模型发生干涉,则干涉身体部分会在沉浸式体验头盔中显示。
21.进一步地,所述步骤五评价打分具体包括:
22.1)将可视性评价、可达性评价、舒适性评价划分细分专业,具体划分为:整车视野、操作方便性、进出方便性、储物空间以及乘坐空间;
23.2)对整车视野、操作方便性、进出方便性、储物空间以及乘坐空间分别制定评分标准并由体验用户分别打分;
24.3)计算各细分专业评价得分;
25.4)根据各细分专业评价得分计算整体评价分数。
26.更进一步地,所述步骤3)计算细分专业评价得分中:
27.整车视野评分计算公式为:
[0028][0029]
乘坐空间评分计算公式:
[0030][0031]
操作方便性评分计算公式:
[0032][0033]
进出方便性评分计算公式:
[0034][0035]
储物空间评分计算公式:
[0036][0037]
式中:s代表细分专业得分,角标表示具体细分专业;p代表细分专业重要度占比。
[0038]
更进一步地,所述步骤4)根据各细分专业评价得分计算整体评价分数为:将所有细分专业加权得分进行累和处理,即得某一待评价汽车车型整体评分,计算公式为:
[0039][0040]
式中:si代表某细分专业得分。
[0041]
作为本发明的另一方面,同时提供一种基于虚拟现实的汽车人机工程评价系统,包括:
[0042]
驾驶舱模拟设备,包括按待评价车型实景布置的主驾驶位模拟座椅、副驾驶位模拟座椅、后排模拟座椅、模拟方向盘,主驾驶位模拟座椅、副驾驶位模拟座椅、后排模拟座椅上分别设有座椅定位器;
[0043]
虚拟现实设备,包括沉浸式体验头盔和光学全身动捕设备,所述光学全身动捕设备包含头部、上身、大臂、小臂、腰部、大腿、小腿、脚部、双手;
[0044]
虚拟现实设备控制器,用于获取虚拟现实设备的实时位置以及相对驾驶舱模拟设备的实时位置信息;
[0045]
高清大屏显示设备,其与所述虚拟现实设备控制器数据连接,将虚拟现实设备控制器发送的信息进行实时显示;
[0046]
数据处理控制器,用于生成评价虚拟场景及各评价虚拟场景下的体验评价指令信号;
[0047]
人机交互控制器,其分别与所述模型及场景控制器以及虚拟现实设备控制器数据连接,加载评价虚拟场景,并获取各评价虚拟场景中虚拟现实设备的位置及动作信息。
[0048]
进一步地,所述虚拟现实设备控制器包括:
[0049]
头盔定位及显示模块,用于定位沉浸式体验头盔在模拟场景中的实时位置以及相对驾驶舱模拟设备的实时位置信息;
[0050]
动捕定位模块,用于获取光学全身动捕设备的实时位置;
[0051]
虚拟人体驱动模块,用于获取光学全身动捕设备各部分的位置信息和动作信息,
并将位置信息和动作信息与驾驶舱模拟设备的位置信息进行融合处理。
[0052]
进一步地,所述模型及场景控制器包括:
[0053]
模型处理模块,用于导入评价车型的汽车造型模型;
[0054]
环境渲染模块,用于对汽车造型模型生成评价虚拟场景;
[0055]
可视性验证及分析模块,用于生成待评价车型的可视性评价指令信号,并处理反馈数据;
[0056]
可达性评价,用于生成待评价车型的可达性评价指令信号,并处理反馈数据;
[0057]
人体包络生成模块,用于通过虚拟现实设备实时数据生成体验用户人体包络数据;
[0058]
干涉分析模块,用于根据人体包络生成模块生成的人体包络数据及驾驶舱模拟设备数据,判断体验用户人体与驾驶舱模拟设备是否发生干涉。
[0059]
进一步地,所述人机交互控制器包括:
[0060]
沉浸式虚拟现实体验模块,用于加载评价虚拟场景,并将评价虚拟场景结合到驾驶舱模拟设备环境及虚拟现实设备环境;
[0061]
动作及姿态录制模块,用于从虚拟现实设备控制器中实时获取并连续存储虚拟现实设备位置、姿态及动作信息;
[0062]
实时干涉处理模块,用于实时检测虚拟现实设备与驾驶舱模拟设备信号并发送给模型及场景控制器,判断检测体验用户人体与驾驶舱模拟设备是否发生干涉,如果检测出发送干涉则发送干涉信号。
附图说明
[0063]
图1为本发明一种基于虚拟现实的汽车人机工程评价方法流程图;
[0064]
图2为本发明一种基于虚拟现实的汽车人机工程评价系统结构示意图。
具体实施方式
[0065]
以下结合附图和实施例进一步介绍本发明的技术方案:
[0066]
实施例1
[0067]
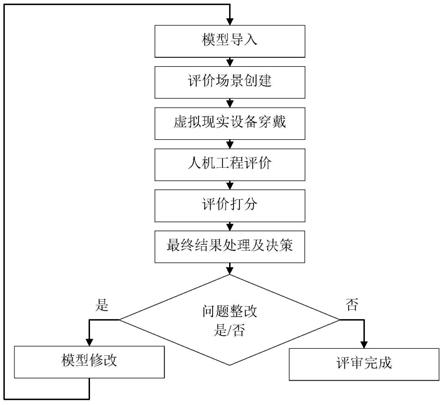
如图1所示,一种基于虚拟现实的汽车人机工程评价方法,包括以下步骤:
[0068]
一、模型导入:将早期用于评价的汽车造型模型导入到评价系统中;
[0069]
二、评价场景创建:在汽车造型模型基础上根据评价点制作用于评价的虚拟场景;
[0070]
三、虚拟现实设备穿戴:
[0071]
体验用户穿戴沉浸式体验头盔和光学全身动捕设备,光学全身动捕设备包含头部、上身、大臂、小臂、腰部、大腿、小腿、脚部、双手。
[0072]
全身动捕设备可以实时捕捉真实人体的动作信息,并在沉浸式体验头盔中生成一个与体验者相似身体尺寸的虚拟人,虚拟人的动作跟体验者动作几乎完全相同。
[0073]
四、人机工程评价体验:
[0074]
体验用户应涵盖但不限于身高小于等于160cm的较矮用户、175cm正常身高用户、大于等于181cm的较高用户。
[0075]
体验用户通过沉浸式体验头盔在接近真实的渲染环境中对整车进行外观和内饰
的观看体验,期间可以通过自身行走或手柄操控实现对车辆360
°
的全方位观察,结合真实座椅帮助体验人员模拟在前后排座椅位置坐下时的感官体验,在观察车辆的过程中可以看到虚拟躯体,帮助感知车辆的位置及尺寸。
[0076]
(1)可视性评价:
[0077]
体验用户在模拟主驾驶位、副驾驶位、后排的座椅上坐下,多次通过沉浸式体验头盔观察车辆a柱、左右后视镜、前发动机盖、雨刷器、hmi显示屏、车窗外部等,对所有部件的可视性进行体验,并在体验过程中记录、评分。
[0078]
(2)可达性评价:
[0079]
体验用户多次通过沉浸式体验头盔观察手部对方向盘,hmi显示屏、安全带、车门开关拉手、车窗升降键、车窗锁止键、油箱开启键等多个部件的触达和操控,观察脚部与离合、刹车、油门等踏板的踩达和踩下,并在体验过程中记录、评分。
[0080]
体验用户进行体验过程中若虚拟人体与模型发生干涉,则干涉身体部分会以红色轮廓的方式在沉浸式体验头盔中显示,并且发生干涉的身体部位的结构说明指示图会从绿变红。
[0081]
(3)舒适性评价:
[0082]
体验用户多次通过沉浸式体验头盔观察上下车过程中腿部与门护板、门槛、b柱、门柱、转向护罩等部件的干涉情况、进一步,多次观察后排乘客座椅乘坐姿态下腿部与后排空调、前排座椅之间的干涉情况,并对体验过程记录、评分;
[0083]
五、评价打分:
[0084]
1)根据人机细分专业进行占比划分,具体要求如下:
[0085]
序号评价维度细分专业占比条目总数1可视性整车视野25.00%182可达性操作方便性20.00%933可达性进出方便性20.00%234可达性储物空间10.00%125舒适性乘坐空间25.00%22
[0086]
综合考虑驾乘安全性、用户关注度和使用频率等维度,初步设定整车视野、乘坐空间、操作方便性、进出方便性和储物空间等五大类条目评分比例分配。在以上五大类评价项目基础上进一步细化评价条目,根据细分条目重要度划分为三个等级,其中“一般:1;比较重要:2;重要:3”,按此标准逐项设定分数占比,对评价项目逐项进行两次加权,保证评价结果准确、可靠。
[0087]
2)制定细分专业评价标准:
[0088]
[0089][0090]
整车视野评价示例:
[0091][0092]
操作方便性评价示例:
[0093][0094]
[0095]
进出方便性评价示例:
[0096][0097]
储物空间评价示例:
[0098][0099]
乘坐空间评价示例:
[0100][0101]
3)计算各细分专业评价得分:整车视野评分计算公式:
[0102][0103]
乘坐空间评分计算公式:
[0104][0105]
操作方便性评分计算公式:
[0106][0107]
进出方便性评分计算公式:
[0108][0109]
储物空间评分计算公式:
[0110][0111]
4)计算人机工程整体评价分数:将所有细分专业加权得分进行累和处理,即可得某一车型整体评分,计算公式为:
[0112][0113]
式中:s——评价条目得分,角标表示具体条目;
[0114]
p——评价条目重要度占比;
[0115]
六、最终结果处理及决策:处理各类人群评价打分结果,对低分项进行升级决策,决策后如需要整改则需形成整改方案。
[0116]
七、问题整改:
[0117]
如果存在问题整改则根据决策意见进行模型修改,然后重复评价步骤验证。如无则无此步骤。
[0118]
实施例2
[0119]
如图2所示,一种基于虚拟现实的汽车人机工程评价系统,包括:
[0120]
1.驾驶舱模拟设备,包括按待评价车型实景布置的主驾驶位模拟座椅、副驾驶位模拟座椅、后排模拟座椅、模拟方向盘,主驾驶位模拟座椅、副驾驶位模拟座椅、后排模拟座椅上分别设有座椅定位器;
[0121]
2.虚拟现实设备,包括沉浸式体验头盔和光学全身动捕设备,所述光学全身动捕设备包含头部、上身、大臂、小臂、腰部、大腿、小腿、脚部、双手;
[0122]
3.虚拟现实设备控制器,包括:
[0123]
头盔定位及显示模块,用于定位沉浸式体验头盔在模拟场景中的实时位置以及相对驾驶舱模拟设备的实时位置信息;
[0124]
动捕定位模块,用于获取光学全身动捕设备的实时位置;
[0125]
虚拟人体驱动模块,用于获取光学全身动捕设备各部分的位置信息和动作信息,并将位置信息和动作信息与驾驶舱模拟设备的位置信息进行融合处理;
[0126]
4.高清大屏显示设备,其与所述虚拟现实设备控制器数据连接,将虚拟现实设备控制器发送的信息进行实时显示;
[0127]
5.数据处理控制器,用于生成评价虚拟场景及各评价虚拟场景下的体验评价指令信号;模型及场景控制器包括:
[0128]
模型处理模块,用于导入评价车型的汽车造型模型;
[0129]
环境渲染模块,用于对汽车造型模型生成评价虚拟场景;
[0130]
可视性验证及分析模块,用于生成待评价车型的可视性评价指令信号,并处理反馈数据;
[0131]
可达性评价,用于生成待评价车型的可达性评价指令信号,并处理反馈数据;
[0132]
人体包络生成模块,用于通过虚拟现实设备实时数据生成体验用户人体包络数据;
[0133]
干涉分析模块,用于根据人体包络生成模块生成的人体包络数据及驾驶舱模拟设备数据,判断体验用户人体与驾驶舱模拟设备是否发生干涉。
[0134]
6.人机交互控制器,其分别与所述模型及场景控制器以及虚拟现实设备控制器数据连接,加载评价虚拟场景,并获取各评价虚拟场景中虚拟现实设备的位置及动作信息;人机交互控制器包括:
[0135]
沉浸式虚拟现实体验模块,用于加载评价虚拟场景,并将评价虚拟场景结合到驾驶舱模拟设备环境及虚拟现实设备环境;
[0136]
动作及姿态录制模块,用于从虚拟现实设备控制器中实时获取并连续存储虚拟现实设备位置、姿态及动作信息;
[0137]
实时干涉处理模块,用于实时检测虚拟现实设备与驾驶舱模拟设备信号并发送给模型及场景控制器,判断检测体验用户人体与驾驶舱模拟设备是否发生干涉,如果检测出发送干涉则发送干涉信号。
[0138]
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
[0139]
以上所述本发明的具体实施方式,并不构成对本发明保护范围的限定。任何根据本发明的技术构思所作出的各种其他相应的改变与变形,均应包含在本发明权利要求的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。