1.本发明涉及鲷鱼烧制备技术领域,具体是一种鲷鱼烧机器人。
背景技术:
2.目前,鲷鱼烧作为一种男女老少皆宜的点心风靡于国内外,但现有鲷鱼烧店制作鲷鱼烧的工作一般均由鲷鱼烧师手工完成,鲷鱼烧师劳动强度大,且随着人力和场地成本日益增长,大幅度增加了鲷鱼烧店的经营成本,而且每位鲷鱼烧师的风格及技术不一样,导致不同鲷鱼烧师制作出来的鲷鱼烧口味也不一样,对鲷鱼烧师的技术依赖性比较高。随着科学技术的不断发展,机器人技术已发展相对成熟,可代替人工完成一系列动作,但是目前市场上还未实现机器人与鲷鱼烧制作的结合。
技术实现要素:
3.本发明的目的在于提供一种鲷鱼烧机器人,以解决现有技术中的问题。
4.为实现上述目的,本发明提供如下技术方案:一种鲷鱼烧机器人,包括双臂机械臂、平台型机架、插取机构、落面糊机构、制鲷鱼烧机构、供料机构、切馅机构、夹紧气缸机构和刷油机构,所述平台型机架的底部设为工作平台,所述落面糊机构设置在所述工作平台上,所述切馅机构位于所述落面糊机构一侧设置在所述工作平台上,所述插取机构于所述双臂机械臂两侧设置在所述工作平台上,所述制鲷鱼烧机构于双臂机械臂前方设置在所述工作平台上,所述供料机构于双臂机械臂一侧设置在所述工作平台上,夹紧气缸机构安装在双臂机械臂手臂末端,刷油机构设置在插取机构后方15cm处。
5.优选的,还包括空压机和控制箱;所述平台型机架位于工作平台下方设有安装腔,所述空压机设置在安装腔内,且所述空压机分别与所述落面糊机构和切馅机构及双臂机械臂相连通,所述控制箱于所述空压机一侧设置在所述安装腔内,所述平台型机架于所述工作平台的边缘设置有开合门,所述平台型机架的底部四周分别设有福马轮。
6.优选的,所述插取机构包括置于工作平台上的双臂机械臂和与双臂机械臂输出端连接的夹紧气缸机构;所述双臂机械臂与控制箱电连接;所述夹紧气缸机构与所述空压机相连通,所述空压机与所述控制箱电连接。
7.优选的,所述夹紧气缸机构上设置有检测装置,所述检测装置与所述控制箱电连接。
8.优选的,所述落面糊机构包括置于工作平台上的支座和置于支座上加面糊机构、储面糊桶及开合模组;所述落面糊机构与所述控制箱电连接。
9.优选的,所述制鲷鱼烧机构包括置于工作平台上的鲷鱼烧机,所述鲷鱼烧机与所述控制箱电连接。
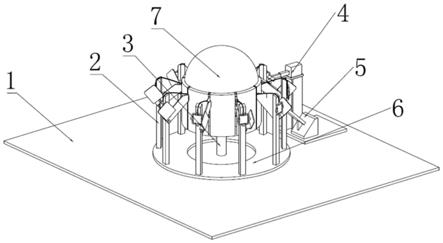
10.优选的,所述供料机构包括壳体、放置平台和分料盒,所述放置平台设置有固定分料盒的定位销。
11.优选的,所述切馅机构包括置于工作平台上的底座和置于底座上的切馅器,所述
切馅器与所述控制箱电连接。
12.优选的,所述刷油机构包括置于工作平台上的支座,所述刷油机构的刷头上安装有快速紧固螺丝。
13.与现有技术相比,本发明的有益效果是:减少人力成本,提高食品安全性、一致性,具有较强的娱乐性,增加与顾客的互动性,设计结构紧凑,使用寿命长,且方便改装和移动,便于推广。
附图说明
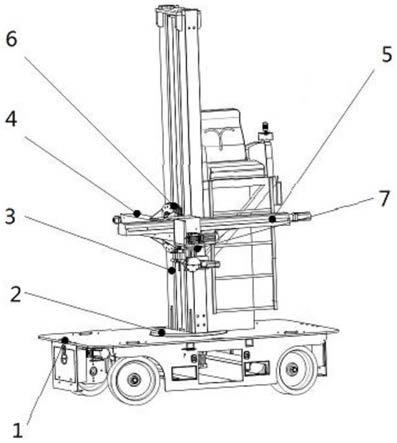
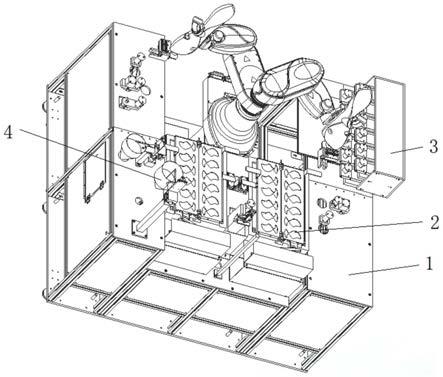
14.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:图1为本发明的结构示意图。
15.图2为本发明平台型机架的结构示意图。
16.图3为本发明制鲷鱼烧机构的结构示意图。
17.图4为本发明供料机构的结构示意图。
18.图5为本发明落面糊机构的结构示意图。
19.图6为本发明切馅机构的结构示意图。
20.图7为本发明切馅机构的侧视图。
21.图8为本发明插取机构的结构示意图。
22.图9为本发明夹紧气缸机构的结构示意图。
23.图10为本发明刷油机构的结构示意图。
24.图中:1、平台型机架;2、制鲷鱼烧机构;3、供料机构;4、落面糊机构;5、切馅机构;6、插取机构;7、夹紧气缸机构;8、刷油机构。
具体实施方式
25.为使本发明实施方式的目的、技术方案和优点更加清楚,下面将结合本发明实施方式中的附图,对本发明实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本发明一部分实施方式,而不是全部的实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。因此,以下对在附图中提供的本发明的实施方式的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
26.请参阅图1
‑
10,本发明实施例中,一种鲷鱼烧机器人,包括双臂机械臂、平台型机架1、插取机构6、落面糊机构4、制鲷鱼烧机构2、供料机构3、切馅机构5、夹紧气缸机构7和刷油机构8,所述平台型机架1的底部设为工作平台,所述落面糊机构4设置在所述工作平台上,所述切馅机构5位于所述落面糊机构4一侧设置在所述工作平台上,所述插取机构6于所述双臂机械臂两侧设置在所述工作平台上,所述制鲷鱼烧机构2于双臂机械臂前方设置在所述工作平台上,所述供料机构3于双臂机械臂一侧设置在所述工作平台上,夹紧气缸机构7安装在双臂机械臂手臂末端,刷油机构8设置在插取机构后方15cm处,还包括空压机和控
制箱;所述平台型机架1位于工作平台下方设有安装腔,所述空压机设置在安装腔内,且所述空压机分别与所述落面糊机构4和切馅机构5及双臂机械臂相连通,所述控制箱于所述空压机一侧设置在所述安装腔内,所述平台型机架1于所述工作平台的边缘设置有开合门,所述平台型机架1的底部四周分别设有福马轮,所述插取机构6包括置于工作平台上的双臂机械臂和与双臂机械臂输出端连接的夹紧气缸机构;所述双臂机械臂与控制箱电连接;所述夹紧气缸机构与所述空压机相连通,所述空压机与所述控制箱电连接,所述夹紧气缸机构7上设置有检测装置,所述检测装置与所述控制箱电连接,所述落面糊机构4包括置于工作平台上的支座和置于支座上加面糊机构、储面糊桶及开合模组;所述落面糊机构4与所述控制箱电连接,所述制鲷鱼烧机构2包括置于工作平台上的鲷鱼烧机,所述鲷鱼烧机与所述控制箱电连,所述供料机构3包括壳体、放置平台和分料盒,所述放置平台设置有固定分料盒的定位销,所述切馅机构5包括置于工作平台上的底座和置于底座上的切馅器,所述切馅器与所述控制箱电连接。
27.本发明的工作原理是:设备上电后,双臂机械臂带动夹紧气缸机构移动到刷油机构8上方,机器人下降到位,由机器人给信号后,启动夹爪夹紧刷油机构8,同时夹紧气缸机构7上的检测装置检测到信号,检测装置反馈信号给控制箱,由控制箱控制双臂机械臂执行下一步动作;接着,双臂机械臂将刷油机构8移动到制鲷鱼烧机构2上方,完成给制鲷鱼烧机构2加热盘刷油动作;接着,双臂机械臂带动将刷油机构8归位;接着双臂机器人左手臂移动到加面糊机构处,启动夹爪由机器人控制从而夹紧加面糊机构,紧接着双臂机器人左手臂带动加面糊机构移动到储面糊桶下方,由机器人给出信号,经过控制箱转换,储面糊桶下方的气缸缩回,面糊从桶内加注到加面糊机构中;经过精确时间后,控制箱给出信号,储面糊桶下面气缸伸出,完成封闭;接着左手臂带动加面糊机构移动至鲷鱼烧机加热盘上,控制器精确控制面糊加注时间,完成分段加注左磨具面糊;完成后由机器人将加面糊机构暂时放回原处,同时右手臂移动到供料机构3处,由控制器给信号至机器人选取馅料盒,夹紧气缸机构7夹紧并检测是否夹到;同时左手臂在完成放加面糊机构后,移动到切馅机构处,由控制器给信号,夹紧气缸夹紧并检测是否夹住切线机构;当同时满足后,控制箱给信号,双臂机器人进行下一步动作,右手臂将馅料盒移动至鲷鱼烧机加热盘第一个模具上方1厘米处,左手臂将切馅机构平行放置于馅料盒中,由控制器给出信号,切馅机构5上的气缸伸缩,完成馅料与馅料盒分离,再由机器人控制左右手臂同时精确移动到第二个第二个模具上方,循环第一步动作;直至6个模具全部放满馅料;由此加注馅料工作完成,机械手臂将切馅机构和馅料盒同时分别归位;此时右手臂在放完馅料盒后进行等待左手臂信号,左手臂放置完成切馅机构后,移动至加面糊机构处,再一次夹紧加面糊机构,完成右面加热模具的加注面糊动作,完成后机器人将加面糊机构放置原位,然后机器人两只手臂回归原位;至此加注面糊动作完成;接着由控制箱控制加热盘气缸旋转,左右磨具重合,进行烤制鲷鱼烧;控制器精确控制烤制时间,时间到后,控制箱给出信号,鲷鱼烧机左右模具由旋转气缸分开;至此烤制鲷鱼烧工作完成;接着控制箱给出信号,双臂机器人进行下一步动作,移动至插取机构处,气夹紧气缸机构7由机器人控制,夹紧插取机构6,检测夹紧后,机械手臂带动插取机构移动到鲷鱼烧成品上方,插取鲷鱼烧成品,并放置到成品区,一次插取一枚鲷鱼烧成品,循环6次后机械手臂将插取机构放回原位,并将自身回归原位;此时工作结束。
28.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,
尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。