技术特征:
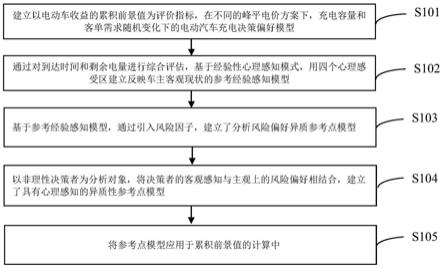
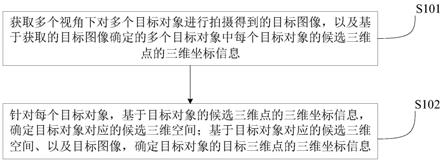
1.基于点云的植物叶绿素含量三维空间立体分布的可视化方法,其特征在于:包括以下步骤:s1、标定可见光相机色彩信息参数并采集植物叶片的彩色图像数据;s2、通过叶绿素含量测量仪检测采集的植物叶片叶绿素含量;s3、对采集到的植物叶片的彩色图像数据进行处理,提取色彩因子;s4、将叶绿素含量测量仪检测到的叶绿素含量与上述处理后提取到的色彩因子进行相关性分析,建立叶绿素含量的最佳回归模型;s5、采集多视角下植物的彩色图像数据;s6、使用尺度和旋转不变性算法,提取多视角下采集到的植物彩色图像中的特征点信息;s7、将上述s6中每张植物彩色图像中的特征点通过邻近搜索,进行特征点匹配;s8、通过运动恢复结构算法得到具有颜色信息的植物三维模型;s9、将上述s4建立的叶绿素含量的最佳回归模型应用在上述s8重建的植物三维模型上,得到所有点相应的叶绿素含量值,通过伪彩色处理后实现植物叶绿素含量三维空间分布可视化。2.根据权利要求1所述的基于点云的植物叶绿素含量三维空间立体分布的可视化方法,其特征在于:所述的步骤s1中可见光相机色彩信息参数标定具体包括以下步骤:s11、首先通过可见光相机采集红、绿、蓝三基色色卡图像,其中红色色卡的rgb色彩通道值分别为(255,0,0),绿色色卡的rgb色彩通道值分别为(0,255,0),蓝色色卡的rgb色彩通道值分别为(0,0,255);s12、从红色色卡图像提取出r通道,从绿色色卡图像提取出g通道,从蓝色色卡图像提取出b通道,计算出r通道下的平均像素点的值,记为y_r,计算出g通道下的平均像素点的值,记为y_g,计算出b通道下的平均像素点的值,记为y_b,其中平均像素点的值计算公式如下所示:其中,y_x为x通道下的平均像素点的值,f
x
(i,j)为x通道下i行j列的值;s13、对步骤s12中得到的各个通道下的平均像素点的值与理论值进行运算,得到r通道下的色彩校正比例系数z_r、g通道下的色彩校正比例系数z_g以及b通道下的色彩校正比例系数z_b,其中色彩校正比例系数的计算函数如下所示:其中,z_x为x通道下的色彩校正比例系数,y_x为x通道下的平均像素点的值;s14、将步骤s13得到的各个通道下的色彩校正比例系数应用到之后可见光相机采集的所有的彩色图像中进而实现色彩校正。3.根据权利要求1所述的基于点云的植物叶绿素含量三维空间立体分布的可视化方法,其特征在于:所述的步骤s2中通过叶绿素含量测量仪检测采集的植物叶片叶绿素含量具体为:s21、将叶绿素含量测量仪进行校准处理;
s22、测量采集到的单个植物叶片上三个不同处的叶绿素含量,将三个不同处的叶绿素含量的平均值作为该植物叶片的叶绿素含量。4.根据权利要求1所述的基于点云的植物叶绿素含量三维空间立体分布的可视化方法,其特征在于:所述的步骤s3具体包括:s31、首先将采集到的植物叶片彩色图像转变为灰度图像;s32、对转变后的灰度图像进行二值化处理,实现植物叶片与背景之间分割;s33、若二值化处理后的植物叶片图像存在一定的噪点,则进行图像降噪处理;s34、通过图像掩模算法对步骤s1采集到的图像与步骤s33降噪处理后的二值图像进行掩模处理,所述的掩模处理是指:将步骤s33降噪处理后的二值图像中的白色像素区域作为感兴趣区域roi,将感兴趣区域roi与步骤s1采集到的图像进行位运算,进行位运算后,得到的仍然是自身数值,其他区域的图像数值变为0,实现图像中植物叶片部分与背景的完全分离;s35、将步骤s34中掩模处理后的植物叶片图像转换到不同的色彩空间,不同的色彩空间包括rgb色彩空间、la*b*色彩空间、hsv色彩空间,从不同的色彩空间提取色彩因子,所述的色彩因子包括r、g、b、h、s、v、l、a、b;计算出植物叶片所占像素点个数以及单通道下色彩因子的总和,将单通道下色彩因子的总和除以植物叶片所占像素点个数作为植物叶片在该通道下的色彩因子的数值;其中f
x
(i,j)为x通道下i行j列的值,s为计算出的植物叶片所占像素点个数,f
x
为植物叶片在x通道下的色彩因子的数值;x通道分别指rgb色彩空间中的r、g、b色彩因子、hsv色彩空间中的h、s、v色彩因子或者la*b*色彩空间中的l、a、b色彩因子;计算色彩因子组合值,所述色彩因子组合值包括g2;s36、将步骤s35中各通道得到的色彩因子的数值以及色彩因子组合值进行归一化处理,把原有的数值区间[0,255]内的数值转换到范围[0,1]区间。5.根据权利要求1所述的基于点云的植物叶绿素含量三维空间立体分布的可视化方法,其特征在于:所述的步骤s4具体包括:将步骤s3中得到的不同色彩空间中不同通道提取的色彩因子以及色彩因子组合值与步骤s2中通过叶绿素含量测量仪检测的植物叶片叶绿素含量值进行线性、非线性的多项式回归模型建立,利用多种模型评价指标选择拟合表现最好的模型作为叶绿素含量的最优回归模型。6.根据权利要求1所述的基于点云的植物叶绿素含量三维空间立体分布的可视化方法,其特征在于:所述的步骤s5具体包括:将可见光相机不动,植物放置在托盘上转动,或者植物不动,可见光相机放置在平台上以植物为中心转动,对每一株植物以18
°
为旋转角度间隔进行图像采集,一个圆周采集20张植物的彩色图像数据。7.根据权利要求1所述的基于点云的植物叶绿素含量三维空间立体分布的可视化方法,其特征在于:所述的步骤s9具体包括:
a91、将步骤s4中的叶绿素含量的最优回归模型应用在步骤s8中重建的植物三维模型的归一化处理后的色彩信息上,使得三维模型的归一化处理后的色彩信息转换为叶绿素含量的估算值;a92、步骤a91中的叶绿素含量估算值分布范围为[0,100],将叶绿素含量估算值分布范围拉伸至[0,255],得到植物叶绿素含量的全灰度值区间分布情况;a93、将步骤a92中的处理后的植物三维模型进行伪彩色处理,使得植物叶绿素含量按空间分布呈现可视化效果。
技术总结
本发明公开了基于点云的植物叶绿素含量三维空间立体分布的可视化方法,包括:采集植物叶片的彩色图像数据;通过叶绿素含量测量仪检测采集的植物叶片叶绿素含量;从植物叶片的彩色图像数据中提取色彩因子;将叶绿素含量测量仪检测到的叶绿素含量与提取到的色彩因子进行相关性分析,建立叶绿素含量的最佳回归模型;将叶绿素含量的最佳回归模型应用在重建的植物三维模型上,得到所有点相应的叶绿素含量值,通过伪彩色处理后实现植物叶绿素含量三维空间分布可视化。本发明解决了目前植物表型信息提取存在的无法大批量、快速、准确、无损的测量叶绿素含量的问题,实现了植物叶绿素含量三维空间分布的可视化,以便直观的观测植物叶绿素含量分布情况。素含量分布情况。素含量分布情况。
技术研发人员:张慧春 杨琨琪 张萌 边黎明 周宏平 郑加强
受保护的技术使用者:南京林业大学
技术研发日:2021.08.11
技术公布日:2021/11/4
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。