1.本发明涉及生物粒子识别、精密测量、医药开发等技术领域,特别涉及一种生物粒子机械特性探测方法的原理和装置。
背景技术:
2.生物粒子的机械振动性质携带了生物体的结构和生理状态信息,对疫病预防、检测和治疗具有重要意义。目前针对生物粒子的主要测试技术,像附加生物粒子质量引起机械振动频率偏移等方法,只能检测到生物粒子的质量,对于同质量但不同类型的生物粒子,无法做到识别,与此同时,像细菌、病毒、蛋白质等尺寸更小、质量更轻的生物粒子,自身引入的扰动小,对谐振传感器机械谐振频率的影响很微弱,一般的探测装置很难探测到这种微弱扰动带来的频率偏移,此外,像拉曼光谱、近场太赫兹显微镜等技术手段,在分辨率和频率范围均不能满足细菌、病毒等较大尺寸生物粒子的机械性能检测,发展新的技术用于生物粒子机械性能的探测,是当前国内外研究的热点。生物粒子的机械频率在几百mhz到几百ghz,谐振器机械频率可以覆盖生物粒子机械振动的频率范围,基于谐振传感器机械模式的频率范围与病毒振动频率范围相匹配的特点,本发明采用频率接近的机械谐振器相互耦合的物理机制,实现生物粒子机械模式的测量。
技术实现要素:
3.本发明的目的是公开一种生物粒子机械振动特性探测的方法及装置。利用频率接近的机械谐振器相互耦合的物理机制实现生物粒子机械模式的测量,放置生物粒子在机械传感器上,检测生物粒子和谐振传感器的机械谱,改变谐振传感器的机械振动模态,直到生物粒子和谐振传感器的机械振动达到耦合状态,根据耦合状态时的频率数据,估算出生物粒子的共振频率和品质因子。通过此方法设计的生物粒子机械特性探测装置具有高机械谐振频率、探测装置要求低、高灵敏度的特性,以及片上集成的潜力,可在生物粒子识别、精密测量、医药开发等领域得到广泛应用。
4.为实现上述发明目的,本发明技术方案如下:
5.一种生物粒子机械振动特性探测的方法,利用频率接近的机械谐振器相互耦合的物理机制实现生物粒子机械模式的测量,放置生物粒子在谐振传感器上,检测附有生物粒子的谐振传感器的机械振动谱,改变谐振传感器的机械振动模态,直到生物粒子和谐振传感器的机械振动相互影响,发生耦合,根据耦合状态时的频率数据,估算出生物粒子的共振频率和品质因子。
6.作为优选方式,生物粒子,是细菌、病毒、蛋白质或其他生物粒子,机械谐振频率范围从几百mhz到几百ghz。
7.作为优选方式,谐振传感器选自悬梁臂、谐振膜、谐振桥、谐振环、谐振盘任一种机械振荡结构,机械谐振频率范围覆盖生物粒子机械谐振频率范围;谐振传感器的机械振动特性通过改变其质量或刚度来进行调节,此外,刚度通过机械、光学、电学方法增加应力进
行调节。
8.作为优选方式,估算生物粒子的共振频率和品质因子的方法具体为:生物粒子的机械频率ω
a,i
和品质因子q
a,i
由以下公式估算得到其中ω
s
和q
s
分别表示谐振传感器的机械频率和品质因子,ω1和ω2分别表示谐振传感器与生物粒子的耦合机械振动频率与谐振传感器机械频率ω
s
的比值,q1和q2分别表示谐振传感器与生物粒子的耦合机械振动品质因子。
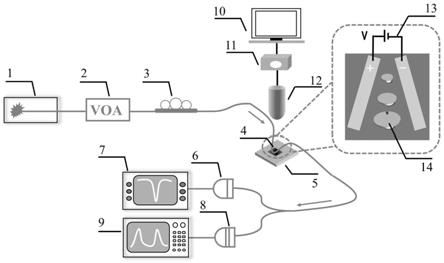
9.本发明还提供一种生物粒子机械振动特性测量系统,包括以下装置:可调谐激光器1、衰减器2、偏振控制器3、拉锥光纤4、位移台5、低频光电探测器6、示波器7、高频光电探测器8、频谱分析仪9、显示器10、电荷耦合元件11、显微镜12、开环压电控制器13,谐振传感器14;
10.可调谐激光器1、衰减器2、偏振控制器3、拉锥光纤4和位移台5按顺序依次连接,分束器一侧连接位移台5,另一侧分成两路,一路是低频光电探测器6和示波器7连接,另一路是高频光电探测器8和频谱分析仪9连接,显微镜12位于拉锥光纤4的正上方,显微镜12和电荷耦合元件11连接,电荷耦合元件11和显示器10连接,谐振传感器14和拉锥光纤4垂直耦合;
11.可调谐激光器1为谐振传感器提供稳定的连续光;
12.衰减器2调节光的功率;
13.偏振控制器3调节光的偏振态;
14.拉锥光纤4将光有效耦合进出微腔;
15.位移台5包括电动纳米位移台和粗调位移台,电动纳米位移台用于负载样品精确运动,粗调位移台用于手动调节范围;
16.低频光电探测器6和示波器7用于探测谐振传感器的光学信号;
17.高频光电探测器8和频谱分析仪9用于探测谐振传感器的机械信号;
18.显示器10、电荷耦合元件11和显微镜12用于观察拉锥光纤4与谐振传感器14之间的相对位置;
19.开环压电控制器13对谐振传感器14两侧的电极施加直流电压。
20.本发明还提供一种机械振动特性测量方法,使用上述的生物粒子机械振动特性测量系统:可调谐激光器1发出的蓝失谐激光经过偏振控制器3调整偏振后,通过拉锥光纤4与谐振传感器14耦合后,激光在谐振传感器14上产生光辐射压力,驱动谐振传感器14机械振动,谐振传感器14机械振动会引起自身的光学频率改变,对于频率为本征光学频率附近的光,其通光功率会随着谐振传感器14的机械振动改变,输出光信号携带自身的机械振动信号,通过低频光电探测器6转换为电信号,再经示波器7提取出谐振传感器14的机械振动模式。
21.作为优选方式,所述机械振动特性测量方法:谐振传感器14上的样品版图设计包括一定数量且大小不同的谐振传感器,不同大小的谐振传感器依次排列,确保整个芯片上的谐振传感器机械谐振频率覆盖生物粒子机械振动频率范围,同时,谐振传感器14两侧的电极,平行于与谐振传感器14相切的方向,“ ”极、
“‑”
极在谐振传感器的两侧交替排列。
22.作为优选方式,所述机械振动特性测量方法,:选择对振动最敏感的光机械器件,通过拉锥光纤耦合的方式对其机械性能进行测试;通过扫描可调谐激光器1波长,将1550nm波段的输出光通过衰减器2衰减后,再经过光纤偏振控制器3后调整偏振态,通过拉锥光纤4与谐振传感器14耦合,将输出的激光光束分成两路,一路经低频光电探测器6和示波器7后,提取出谐振传感器14的光学谐振信号;一路经高频光电探测器8和频谱分析仪9提取谐振传感器14的机械谐振信号;频谱分析仪9测到的谱图得到谐振传感器14的机械谐振频率和品质因子;对谐振传感器14两侧电极施加直流电压,改变谐振传感器14的谐振频率,使其贴近于生物粒子的机械振动频率,生物粒子吸附在谐振传感器14之前和之后,如果谐振传感器14的机械模式从单个劈裂成两个,且品质因子大大降低,说明生物粒子与谐振传感器14发生机械共振,耦合在一起;在耦合过程中,观测到谐振传感器14机械频率劈裂产生到消失的过程。
23.作为优选方式,所述机械振动特性测量方法包括如下步骤:
24.(1)一种可调谐激光器1为装置提供1550nm波段的稳定激光;通过衰减器2调节光功率;通过偏振控制器3调节光的偏振状态,使拉锥光纤4与谐振传感器14发生耦合;
25.(2)拉锥光纤4通过氢焰加热并同时拉伸单模光纤:拉锥光纤4的中心直径为1μm,与光学波长相当;其中拉锥光纤4中心区域弯曲,使得它的倏逝场更好地出现自身周围的环境中,使得它贴近谐振传感器14时发生耦合;
26.(3)拉锥光纤4的另一侧接分束器,将光分成两路;一路被低频光电探测器6探测,转换成电信号传递给示波器7,通过扫描可调谐激光器1的输出光波长,测量每一波长的透射光功率,即可得到谐振传感器的光学特性;当蓝失谐光信号波长设置于光学谐振中最大斜率处,谐振波长的变化会改变该处的光学透射率,进而使器件透射光的强度受到机械振动的调制,因而可以从频谱分析仪9记录的透射光强度频谱信息中,得到谐振传感器14机械振动特性;这时,将分束器的另一路光信号送入高频光电探测器8,高频光电探测器8将蓝失谐光信号转换为电信号,送入频谱分析仪9进行读取谐振传感器14的机械信号;
27.(4)位移台5调节样品位置,使得拉锥光纤4与谐振传感器14进行耦合;
28.(5)显示器10、电荷耦合元件11和显微镜12用于观察拉锥光纤4与谐振传感器14之间的相对位置;
29.(6)开环压电控制器13对谐振传感器14两侧的电极施加直流电压;
30.(7)单个谐振传感器14上的样品包括一定数量且大小不同的谐振传感器,不同大小的谐振传感器依次排列,确保整个芯片上的谐振传感器机械谐振频率覆盖病毒机械振动频率范围,同时,谐振传感器两侧的电极,平行于与谐振传感器相切的方向,“ ”极、
“‑”
极在谐振传感器的两侧交替排列;
31.(8)制备样品,验证谐振传感器机械模式和电学调谐性,确定可调谐的范围;
32.(9)从之前的谐振传感器阵列测试结果中,得到不同大小谐振传感器的电学调谐范围,根据电学调谐范围,确定不同谐振传感器之间的尺寸差,重新设计谐振传感器阵列,通过不断地测量、筛选和优化谐振传感器样品,最终获得适用于生物粒子探测的谐振传感器样品;
33.(10)对谐振传感器两侧的电极施加直流电压,不断改变谐振传感器的机械振动频率,直到生物粒子和谐振传感器的机械振动达到耦合状态;对比生物粒子转移前后谐振传
感器的机械模式变化,如果在转移生物粒子后谐振模式增加一个,则说明测试到生物粒子与谐振传感器机械振动耦合的信号,在这一调谐过程中,观测到附有生物粒子的谐振传感器机械频率劈裂产生到消失的过程;
34.(11)根据理论预期,整个调谐过程分为以下三个区间:当被测生物粒子的机械频率远高于谐振传感器机械频率,由于受到生物粒子重物的影响,谐振传感器的机械频率会发生偏移;当被测生物粒子的机械频率接近于谐振传感器机械频率,谐振传感器与生物粒子耦合,谐振传感器的机械模式劈裂成两个,一个来源于谐振传感器与被测生物粒子机械振动方向相同,另一个来源于谐振传感器与被测生物粒子机械振动方向相反;当被测生物粒子的机械频率远低于谐振传感器的机械频率,谐振传感器的机械模式不变。
35.本发明还提供一种所述的机械振动特性测量方法在估算生物粒子机械谐振频率的应用:
36.(1)利用有限元方法初步估算生物粒子的机械谐振频率,生物粒子直径在10nm
‑
1000nm之间,经有限元仿真计算得生物粒子机械振动频率在几百mhz到几百ghz,供谐振传感器的尺寸设计提供参考;生物粒子与谐振传感器接触面半径为生物粒子半径的四分之三,然后设计谐振传感器的尺寸,确保谐振传感器机械谐振频率覆盖病毒机械振动频率范围;
37.(2)在生物粒子机械振动模式仿真结果基础上,仿真设计谐振传感器样品结构;
38.(3)通过谐振传感器机械振动特性测量系统,得到生物粒子和谐振传感器耦合的机械频率,并以此估算出生物粒子的机械频率和品质因子。
39.本发明的有益效果是:提供了一种生物粒子机械振动特性探测的方法和装置。该方法利用频率接近的机械谐振器相互耦合的物理机制实现生物粒子机械模式的测量。通过此方法设计出的谐振传感器,具有较高灵敏度和探测装置简单的特点,可在粒子识别、精密测量、医药开发等领域得到广泛应用。
附图说明
40.图1为本发明谐振传感器机械振动特性测量光路图。
41.图2为本发明有限元仿真估算生物粒子机械谐振频率结果图。
42.图3为本发明有限元仿真设计铌酸锂微盘机械振动模式结果图。
43.图4为本发明铌酸锂微盘样品阵列设计图。
44.图5为本发明铌酸锂微盘对生物粒子机械模式测量理论预测结果图。
45.其中,1为可调谐激光器,2为衰减器,3为偏振控制器,4为拉锥光纤,5为位移台,6为低频光电探测器,7为示波器,8为高频光电探测器,9为频谱分析仪,10为显示器,11为电荷耦合元件,12为显微镜,13为开环压电控制器,14为谐振传感器。
具体实施方式
46.下面结合附图和具体实施例子进一步说明本发明的技术方案。
47.本实施例提出一种生物粒子机械振动特性探测的方法及装置,像细菌、病毒、蛋白质等生物粒子的机械谐振频率从未被测量过,需要先借助仿真工具分析该方法的可行性,分析内容包括生物粒子机械模式的有限元仿真结果和谐振传感器的有限元仿真设计。以具
有电学可调谐性的铌酸锂微盘作为谐振传感器,测量直径60nm
‑
140nm生物粒子机械振动特性的具体实施方案为例。
48.实施例1
49.一种生物粒子机械振动特性探测的方法,利用频率接近的机械谐振器相互耦合的物理机制实现生物粒子机械模式的测量,放置生物粒子在谐振传感器上,检测附有生物粒子的谐振传感器的的机械振动谱,改变谐振传感器的机械振动模态,直到生物粒子和谐振传感器的机械振动相互影响,发生耦合,根据耦合状态时的频率数据,估算出生物粒子的共振频率和品质因子。
50.生物粒子,是细菌、病毒、蛋白质或其他生物粒子,机械谐振频率范围从几百mhz到几百ghz。
51.谐振传感器选自悬梁臂、谐振膜、谐振桥、谐振环、谐振盘任一种机械振荡结构,机械谐振频率范围覆盖生物粒子机械谐振频率范围;谐振传感器的机械振动特性通过改变其质量或刚度来进行调节,此外,刚度通过机械、光学、电学方法增加应力进行调节。
52.估算生物粒子的共振频率和品质因子的方法具体为:生物粒子的机械频率ω
a,i
和品质因子q
a,i
由以下公式估算得到其中ω
s
和q
s
分别表示谐振传感器的机械频率和品质因子,ω1和ω2分别表示谐振传感器与生物粒子的耦合机械振动频率与谐振传感器机械频率ω
s
的比值,q1和q2分别表示谐振传感器与生物粒子的耦合机械振动品质因子。
53.实施例2
54.如图1所示,本实施例提供一种生物粒子机械振动特性测量系统,包括以下装置:可调谐激光器1、衰减器2、偏振控制器3、拉锥光纤4、位移台5、低频光电探测器6、示波器7、高频光电探测器8、频谱分析仪9、显示器10、电荷耦合元件11、显微镜12、开环压电控制器13,谐振传感器14;
55.可调谐激光器1、衰减器2、偏振控制器3、拉锥光纤4和位移台5按顺序依次连接,分束器一侧连接位移台5,另一侧分成两路,一路是低频光电探测器6和示波器7连接,另一路是高频光电探测器8和频谱分析仪9连接,显微镜12位于拉锥光纤4的正上方,显微镜12和电荷耦合元件11连接,电荷耦合元件11和显示器10连接,谐振传感器14和拉锥光纤4垂直耦合;
56.可调谐激光器1为谐振传感器提供稳定的连续光;
57.衰减器2调节光的功率;
58.偏振控制器3调节光的偏振态;
59.拉锥光纤4将光有效耦合进出微腔;
60.位移台5包括电动纳米位移台和粗调位移台,电动纳米位移台用于负载样品精确运动,粗调位移台用于手动调节范围;
61.低频光电探测器6和示波器7用于探测谐振传感器的光学信号;
62.高频光电探测器8和频谱分析仪9用于探测谐振传感器的机械信号;
63.显示器10、电荷耦合元件11和显微镜12用于观察拉锥光纤4与谐振传感器14之间的相对位置;
64.开环压电控制器13对谐振传感器14两侧的电极施加直流电压。
65.实施例3
66.本实施例提供一种机械振动特性测量方法,使用上述实施例2的生物粒子机械振动特性测量系统:可调谐激光器1发出的蓝失谐激光经过偏振控制器3调整偏振后,通过拉锥光纤4与谐振传感器14耦合后,激光在谐振传感器14上产生光辐射压力,驱动谐振传感器14机械振动,谐振传感器14机械振动会引起自身的光学频率改变,对于频率为本征光学频率附近的光,其通光功率会随着谐振传感器14的机械振动改变,输出光信号携带自身的机械振动信号,通过低频光电探测器6转换为电信号,再经示波器7提取出谐振传感器14的机械振动模式。
67.所述机械振动特性测量方法中:谐振传感器14上的样品版图设计包括一定数量且大小不同的谐振传感器,不同大小的谐振传感器依次排列,确保整个芯片上的谐振传感器机械谐振频率覆盖生物粒子机械振动频率范围,同时,谐振传感器14两侧的电极,平行于与谐振传感器14相切的方向,“ ”极、
“‑”
极在谐振传感器的两侧交替排列。
68.所述机械振动特性测量方法,:选择对振动最敏感的光机械器件,通过拉锥光纤耦合的方式对其机械性能进行测试;通过扫描可调谐激光器1波长,将1550nm波段的输出光通过衰减器2衰减后,再经过光纤偏振控制器3后调整偏振态,通过拉锥光纤4与谐振传感器14耦合,将输出的激光光束分成两路,一路经低频光电探测器6和示波器7后,提取出谐振传感器14的光学谐振信号;一路经高频光电探测器8和频谱分析仪9提取谐振传感器14的机械谐振信号;频谱分析仪9测到的谱图得到谐振传感器14的机械谐振频率和品质因子;对谐振传感器14两侧电极施加直流电压,改变谐振传感器14的谐振频率,使其贴近于生物粒子的机械振动频率,生物粒子吸附在谐振传感器14之前和之后,如果谐振传感器14的机械模式从单个劈裂成两个,且品质因子大大降低,说明生物粒子与谐振传感器14发生机械共振,耦合在一起;在耦合过程中,观测到谐振传感器14机械频率劈裂产生到消失的过程。
69.实施例4
70.本实施例提供一种机械振动特性测量方法,使用上述实施例2的生物粒子机械振动特性测量系统,包括如下步骤:
71.(1)一种可调谐激光器1为装置提供1550nm波段的稳定激光;通过衰减器2调节光功率;通过偏振控制器3调节光的偏振状态,使拉锥光纤4与谐振传感器14发生耦合;
72.(2)拉锥光纤4通过氢焰加热并同时拉伸单模光纤:拉锥光纤4的中心直径约为1μm,与光学波长相当;其中拉锥光纤4中心区域弯曲,使得它的倏逝场更好地出现自身周围的环境中,使得它贴近谐振传感器14时发生耦合;
73.(3)拉锥光纤4的另一侧接分束器,将光分成两路;一路被低频光电探测器6探测,转换成电信号传递给示波器7,通过扫描可调谐激光器1的输出光波长,测量每一波长的透射光功率,即可得到谐振传感器的光学特性;当蓝失谐光信号波长设置于光学谐振中最大斜率处,谐振波长的变化会改变该处的光学透射率,进而使器件透射光的强度受到机械振动的调制,因而可以从频谱分析仪9记录的透射光强度频谱信息中,得到谐振传感器14机械振动特性;这时,将分束器的另一路光信号送入高频光电探测器8,高频光电探测器8将蓝失谐光信号转换为电信号,送入频谱分析仪9进行读取谐振传感器14的机械信号;
74.(4)位移台5调节样品位置,使得拉锥光纤4与谐振传感器14进行耦合;
75.(5)显示器10、电荷耦合元件11和显微镜12用于观察拉锥光纤4与谐振传感器14之间的相对位置;
76.(6)开环压电控制器13对谐振传感器14两侧的电极施加直流电压;
77.(7)单个谐振传感器14样品结构如图1虚线框部分,上的样品包括一定数量且大小不同的谐振传感器,不同大小的谐振传感器依次排列,确保整个芯片上的谐振传感器机械谐振频率覆盖病毒机械振动频率范围,同时,谐振传感器两侧的电极,平行于与谐振传感器相切的方向,“ ”极、
“‑”
极在谐振传感器的两侧交替排列如图4所示;
78.(8)制备样品,验证谐振传感器机械模式和电学调谐性,确定可调谐的范围;
79.(9)从之前的谐振传感器阵列测试结果中,得到不同大小谐振传感器的电学调谐范围,根据电学调谐范围,确定不同谐振传感器之间的尺寸差,重新设计谐振传感器阵列,通过不断地测量、筛选和优化谐振传感器样品,最终获得适用于生物粒子探测的谐振传感器样品;
80.(10)对谐振传感器两侧的电极施加直流电压,不断改变谐振传感器的机械振动频率,直到生物粒子和谐振传感器的机械振动达到耦合状态;对比生物粒子转移前后谐振传感器的机械模式变化,如果在转移生物粒子后谐振模式增加一个,则说明测试到生物粒子与谐振传感器机械振动耦合的信号,在这一调谐过程中,观测到附有生物粒子的谐振传感器机械频率劈裂产生到消失的过程;
81.(11)根据理论预期,整个调谐过程分为以下三个区间:当被测生物粒子的机械频率远高于谐振传感器机械频率,由于受到生物粒子重物的影响,谐振传感器的机械频率会发生偏移;当被测生物粒子的机械频率接近于谐振传感器机械频率,谐振传感器与生物粒子耦合,谐振传感器的机械模式劈裂成两个,一个来源于谐振传感器与被测生物粒子机械振动方向相同,另一个来源于谐振传感器与被测生物粒子机械振动方向相反;当被测生物粒子的机械频率远低于谐振传感器的机械频率,谐振传感器的机械模式不变。
82.实施例5
83.本实施例提供一种机械振动特性测量方法在估算生物粒子机械谐振频率的应用,包括如下步骤:
84.(1)利用有限元方法初步估算生物粒子的机械谐振频率,生物粒子直径在10nm
‑
1000nm之间,经有限元仿真计算得生物粒子机械振动频率在几百mhz到几百ghz,供谐振传感器的尺寸设计提供参考;生物粒子与谐振传感器接触面半径为生物粒子半径的四分之三,然后设计谐振传感器的尺寸,确保谐振传感器机械谐振频率覆盖病毒机械振动频率范围;
85.(2)在生物粒子机械振动模式仿真结果基础上,仿真设计谐振传感器样品结构;
86.(3)通过谐振传感器机械振动特性测量系统,得到生物粒子和谐振传感器耦合的机械频率,并以此估算出生物粒子的机械频率和品质因子。
87.如图2所示,利用有限元方法初步估算生物粒子的机械谐振频率,对于生物粒子直径在60nm
‑
140nm之间,生物粒子与铌酸锂微盘接触面半径为生物粒子半径的四分之三,杨氏模量5.5gpa,泊松比0.35,密度920kg/m3,经有限元仿真计算可得生物粒子机械振动频率在1
‑
10ghz范围内,供铌酸锂微盘的尺寸设计提供参考。
88.在生物粒子机械振动模式仿真结果基础上,仿真设计铌酸锂微盘样品结构,预期
设计铌酸锂微盘机械谐振频率在1
‑
10ghz范围内,如图3所示。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。