1.本发明属于智能穿戴设备技术领域,更具体地,涉及一种可穿戴分布式柔性压力传感臂环。
背景技术:
2.我国上肢功能障碍患者数量庞大,康复医疗已成为影响国计民生的重点问题之一。当今康复机构数量紧缺导致家用可穿戴康复设备需求十分迫切。柔性传感器具有良好的韧性、延展性可以自由弯曲甚至折叠,根据测量条件可应用于电子皮肤、医疗保健、运动器材等方面。可穿戴柔性电子设备快速发展,在运动监测、医疗康复和软体机器人等领域具有潜在的应用前景,柔性传感器可以更加贴合皮肤表面,能够随时感知和识别肌肉的运动,因此能够很好地应用于家庭可穿戴设备的使用场景中。
3.近年来,学界提出采用压阻传感器fmg(肌动信号,force myography)代替传统的肌电传感器semg(表面肌电型号,surface electromyography)来实现运动意图识别。semg传感器通过与人体皮肤表面贴合的电极采集肌肉电信号,因此信号对皮肤表面状况非常敏感,容易掺杂噪声,影响识别的精准性。而fmg技术使用压阻传感器(force sensitive resistors),采集肢体的压力信号,借助相应位置的手臂刚度变化来识别肢体的位置或运动,克服了肌电信号电极复杂、抗干扰能力差且对人体电阻敏感的缺点,具备结构简单、抗干扰能力强、成本低等优势,并且相关研究表明,精度上fmg也可以较好地代替semg用于肢体运动意图的识别。
4.另一方面,意图识别的准确性很大程度上取决于信号采集的位置、数量以及人体自身的能力。为了提高运动意图识别的准确率,目前常见可穿戴设备往往使用圆周分布的传感识别模块进行肌肉各类信号的采集,如cn103315737a、cn10365477b。这种分布模式下的传感识别模块数量往往较多,从而极大地限制了穿戴者的使用效果和交互体验。因此,为使可穿戴康复设备走向家庭应用,需要降低传感识别模块的数量,并合理分布传感识别模块的位置,从而在保证系统识别精度的前提下降低穿戴设备的系统复杂度。
技术实现要素:
5.针对现有技术的缺陷,本发明的目的在于提供一种可穿戴分布式柔性压力传感臂环,旨在解决传统可穿戴设备通过采用肌肉电信号对人体运动意图进行识别,存在识别精准性不高的问题;以及传统使用圆周式分布的传感识别模块进行肌肉各类信号的采集,造成传感识别模块数量较多,给用户使用体验造成不便的问题。
6.为实现上述目的,本发明提供了一种可穿戴分布式柔性压力传感臂环,包括分布式薄膜压力传感器、导电臂环和信号分析盒,其中,
7.所述分布式薄膜压力传感器包括柔性连接薄膜和多个肌力信号测点,所述肌力信号测点用于采集用户手臂力测点的压力信号;所述柔性连接薄膜中预埋有铜线,多个所述肌力信号测点通过所述铜线集成在所述柔性连接薄膜的指定位置中,所述指定位置为用户
佩戴臂环时对应人体手臂肌肉尺寸变形的敏感区域,所述敏感区域为在选取的特定肢体动作下识别得到;
8.所述柔性连接薄膜贴合设置在所述导电臂环上,所述导电臂环通过导线与所述铜线上的触点电相连,用于获取用户手臂在运动过程中的形态学参数变化信号;
9.所述信号分析盒内设有多通道信号调理模块、数据处理模块和无线传输模块,多个所述肌力信号测点通过数据传输线对应与所述信号调理模块的多通道接收端电相连,所述信号调理模块的输出端与所述数据处理模块的输入端电相连,所述数据处理模块的输出端通过所述无线传输模块与上位机无线通信,所述上位机内预先建立有压力信号
‑
形态学参数映射模型。
10.在其中一个实施例中,所述分布式薄膜压力传感器包括8个肌力信号测点,所述多通道信号调理模块采用八通道信号调理模块。
11.在其中一个实施例中,所述柔性连接薄膜包括2块结构相同的传感器蒙皮,每个所述传感器蒙皮包括层叠设置的透明tpu层、电镀层和铜电极层,2块所述传感器蒙皮的铜电极层相对设置。
12.在其中一个实施例中,所述柔性连接薄膜采用柔性可拉伸薄膜材料在印刷法工艺上,结合3d打印方法制成。
13.在其中一个实施例中,所述肌力信号测点采用flexiforce系列薄膜压力传感器分离表层塑料薄膜后制成。
14.在其中一个实施例中,所述导电臂环采用电阻型织物材料基于丝网印刷工艺制成,所述电阻型织物材料采用银纳米线材料。
15.在其中一个实施例中,所述无线传输模块包括蓝牙模块和wifi数据传输模块,所述数据处理模块通过所述蓝牙模块与外部终端设备无线通信,所述数据处理模块通过所述wifi数据传输模块与所述上位机进行无线通信。
16.在其中一个实施例中,所述数据处理模块包括stm32f407zgt6主控芯片和a/d转换芯片。
17.在其中一个实施例中,所述信号分析盒内还设有充电式电源模块,所述充电式电源模块包括可充电锂电池和电源稳压单元,所述可充电锂电池与所述电源稳压单元电相连,所述电源稳压单元通过电源线为所述肌力信号测点、所述数据处理模块以及所述信号调理模块供电。
18.在其中一个实施例中,所述信号分析盒的外壳由韧性尼龙与微碳纤维复合材料3d打印而成。
19.总体而言,通过本发明所构思的以上技术方案与现有技术相比,具有如下技术效果:
20.(1)本发明提供的可穿戴分布式柔性压力传感臂环,采集用户手臂的压力信号以进行肢体运动意图识别,相比于传统采集肌电信号进行识别,抗干扰性更强,识别的精准性更高。
21.(2)相比于传统仅能识别包含截面上肌肉信号的圆周式测点,本发明采用分布式测点可以更精确的选取动作识别所需的肌肉信号,能实现相同测点数量识别更多的肢体动作,或识别相同数量的肢体动作所需的测点数量更少,能有效降低穿戴的复杂度。
22.(3)采用导电臂环,在获得手臂各测点的压力信息的同时,又能通过导电臂环获得手臂在运动过程中的形态学参数变化,通过采集到的手臂力测点的压力信号和形态学参数信号,能有效感知用户手臂的肌肉运动信息,进一步提高识别的精准性。
附图说明
23.图1为一实施例中可穿戴分布式柔性压力传感臂环的结构示意图;
24.图2为图1中可穿戴分布式柔性压力传感臂环的后视结构示意图;
25.图3为一实施例中信号分析盒内各模块的连接关系示意图;
26.图4为一实施例中可穿戴分布式柔性压力传感臂环的制备工艺流程示意图;
27.图5~图9为一实施例中可穿戴分布式柔性压力传感臂环制备各详细步骤示意图;
28.图10为一实施例中信号分析盒的内部结构示意图;
29.图11为图10中信号分析盒的整体结构示意图。
具体实施方式
30.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
31.本发明提供了一种可穿戴分布式柔性压力传感臂环,用以解决传统臂环通过采用肌肉电信号进行运动意图识别,存在识别精准性不高的问题;以及传统传感模块采用圆周式分布,覆盖肌肉群组有限,穿戴复杂度高,给用户使用体验造成不便的问题。
32.本发明提供的可穿戴分布式柔性压力传感臂环采用分布式压力传感器和导电臂环,通过多通道信号调理模块对用户手臂的压力数据和形态学参数变化数据进行采集,通过无线传输模块将数据上传至上位机,通过上位机利用预先通过数据训练得到的压力信号
‑
形态学参数映射模型进行数据解析,可以有效完成肢体运动意图的解析,以进行康复训练。
33.具体地,参见图1和图2,本发明提供的可穿戴分布式柔性压力传感臂环包括分布式薄膜压力传感器、导电臂环100和信号分析盒200,其中,分布式薄膜压力传感器包括柔性连接薄膜300和多个肌力信号测点400,该肌力信号测点400为薄膜结构,便于集成在柔性连接薄膜300的指定位置中,用于采集用户手臂力测点的压力信号。
34.肌力信号测点400用于采集手臂力测点的压力信号,可以理解的是,该肌力信号测点400是由压力传感器fmg(肌动信号,force myography)制成,为方便集成在柔性连接薄膜300中,制成得到的薄膜结构需带有电极层和导电层,其中,电极层用于连接电源,为测点进行供电;导电层用于连接信号分析盒200,将采集到的信号发送给信号分析盒200进行信号处理。
35.需要说明的是,本实施例提供的肌力信号测点400,用于采集手臂的压力信号,是借助相应位置的手臂刚度变化来识别肢体的位置或运动,能有效解决传统采用肌电传感器采集肌肉电信号,存在电极复杂、抗干扰能力差且对人体电阻敏感的问题。
36.柔性连接薄膜300中预埋有铜线,多个肌力信号测点400通过铜线、按照力测点的分布要求集成在柔性连接薄膜300的指定位置中,该指定位置为用户穿戴臂环时对应用户
手臂肌肉尺寸变形的敏感区域,可以理解为,手臂肌肉尺寸变形最明显的几个区域,且该区域是针对人体手臂在做特定的几组肢体动作下通过反复实验识别得到。
37.为更清楚地说明该指定位置设置的方式,以下举例说明:以肩关节3个自由度,肘关节1个自由度和腕关节2个自由度这几个自由度组合的肢体动作,比如屈肘、抬臂和扩胸等,在该肢体动作下通过反复实验识别得到当前人体手臂肌肉尺寸变形的敏感区域点有8个,前臂和后臂各4个敏感区域点。
38.可以理解的,当本实施例提供的臂环主要用于识别用户的屈肘、抬臂和扩胸等动作时,该臂环所采用的肌力信号测点的数量即可设置为8个,用户在穿戴臂环时8个肌力信号测点刚好对应前述通过反复实验识别得到的8个区域点上。应当可以理解的是,本实施例提供的臂环可根据识别肢体种类的不同,相应调整测点数量和位置分布,既能满足用户康复所需的个性化需求,又能满足普适性,降低生产制造成本。
39.柔性连接薄膜300贴合设置在导电臂环100上,导电臂环100通过导线与柔性连接薄膜300中铜线上的触点电相连,导电臂环100用户获取手臂在运动过程中的形态学参数变化,即各测点之间的距离变化,并将该变化信号通过铜线发送至肌力信号测点上。进一步地,导电臂环100可采用电阻型织物材料基于丝网印刷工艺制成。具体地,该电阻型织物材料可采用银纳米线材料。
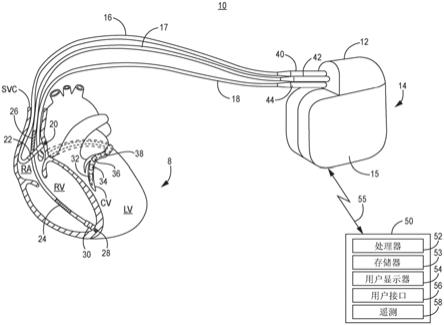
40.参见图3,信号分析盒200内设有多通道信号调理模块210、数据处理模块220和无线传输模块230,多个肌力信号测点400通过数据传输线23对应与信号调理模块210中的多通道接收端电相连,信号调理模块210的输出端与数据处理模块220的输入端电相连,数据处理模块220的输出端通过无线传输模块230与上位机50无线通信,上位机50内预先建立有压力信号
‑
形态学参数映射模型。
41.需要说明的是,信号调理模块210中的通道数量可根据肌力信号测点400的数量进行相应设置,也即是说,信号调理模块210的通道数量要大于或等于肌力信号测点400的数量。对应地,前述实施例提供的肌力信号测点数量设置为8个,考虑到成本问题,则信号调理模块210的通道数据对应设置为8个即可。
42.肌力信号测点将其采集到的用户手臂力测点上的压力信号、以及通过铜线接收到的形态学参数变化信号通过信号调理模块210发送至数据处理模块220进行数据处理,具体地,数据处理可以为对数据进行a/d数据转换和/或信号放大等处理。处理后的信号通过无线传输模块230无线传输至上位机50,上位机50根据接收到的信号、通过预先通过数据训练得到的压力信号
‑
形态学参数映射模型进行解析,识别当前用户肢体运动意图,以进行康复训练。
43.上述提供的可穿戴分布式柔性压力传感臂环,通过采集用户手臂的压力信号以进行肢体运动意图识别,相比于传统采集肌电信号进行识别,抗干扰性更强,识别的精准性更高;相比于传统仅能识别包含截面上肌肉信号的圆周式测点,本实施例采用分布式测点可以更精确的选取动作识别所需的肌肉信号,实现相同测点数量识别更多的肢体动作,或识别相同数量的肢体动作所需的测点数量更少,能有效降低穿戴的复杂度;采用导电臂环,在获得手臂各测点的压力信息的同时,又能通过导电臂环获得手臂在运动过程中的形态学参数变化,通过采集到的手臂力测点的压力信号和形态学参数信号,能有效感知用户手臂的肌肉运动信息,进一步提高识别的精准性。
44.在一个实施例中,分布式压力传感器中的柔性连接薄膜包括2块结构相同的传感器蒙皮,每块传感器蒙皮包括层叠设置的透明tpu(热塑性聚氨酯弹性体橡胶)层、电镀层和铜电极层,两块传感器蒙皮的铜电极层相对设置。多个肌力信号测点按照测点的分布要求设置在相对设置的两个铜电极层中。
45.在本实施例中,铜电极层即前述提到的铜线,相对设置的两个铜电极层上均设有触点,导电臂环通过导线分别与这两个触点电相连。该铜电极层主要用于信号传输,即用于接收导电臂环采集到的形态学参数变化信号,并将接收到的信号发送至肌力信号测点上的导电层,肌力信号测点的导电层通过数据传输线23将其自身采集到的用户手臂力测点的压力信号、及其接收到的形态学参数信号一起发送至信号分析盒200进行信号处理。
46.电镀层中对应设置肌力信号测点的区域采用pc材料,该区域为肌力信号测点采用的压力传感器的电镀垫,该区域的大小与采用的压力传感器的直径相对应;电镀层中的其他区域可采用tpu材料制成,主要作为各测点之间的柔性连接材料使用。透明tpu层则主要用于保护内部铜电极层和电镀层。
47.为制备得到上述结构的分布式压力传感器,分压式薄膜压力传感器中的柔性连接薄膜可采用柔性可拉伸薄膜材料在印刷法工艺上,结合3d打印方法制成。分压式薄膜压力传感器中的肌力信号测点可采用tekscan公司研制的flexiforce系列薄膜压力传感器分离表层塑封薄膜后制成,即获得仅带有铜电极层和tpu/cb混合导电层的薄膜压力传感器,采用flexiforce系列薄膜压力传感器较同类薄膜测力产品具有更好的特性。
48.具体地,参见图4,完整的制备分布式薄膜压力传感器的工艺流程包括准备图样、准备tpu层、分离薄膜传感器、制备电镀层、蚀刻铜电极层、组装所有层、组装臂环七个步骤,详述如下:
49.步骤一:准备图样。参见图5,使用激光打印机将设计好的分布式臂环形状框架打印在热转印纸上,以方便后续集成时进行各层之间相对位置的匹配。然后将其放置于带有丙烯酸粘合剂的铜箔胶带上,使用加热层压机使油墨图案在高温下转移到铜箔胶带上。
50.步骤二:准备tpu层。参见图6,将透明tpu板放在丙烯酸板上,将tpu板和丙烯酸板之间的气泡从边缘挤出,直到将其均匀地粘贴。
51.步骤三:分离薄膜传感器。参见图6,将选取的flexiforce系列薄膜压力传感器上下两层的塑封薄膜分离出来,获得带有铜电极层和tpu/cb混合导电层的薄膜压力传感器,以方便嵌入到分布式臂环中。
52.步骤四:制备电镀层。参见图6,对照分布式臂环的外框参考图样,使用3d打印机打印电镀层,镀层采用混合材料进行印刷。其中pc材料作为薄膜压力传感器的电镀垫,直径与采用的flexiforce系列薄膜压力传感器的直径对应,tpu材料作为各测力点之间的柔性连接材料使用。
53.步骤五:蚀刻铜电极层。参见图7,将电镀层放置在透明tpu板上,借助图样将镀层与tpu板对齐,将带有图样油墨的铜箔胶带粘附在其上,对铜箔胶带进行滚压以实现完全粘附。然后,将附着有tpu层、镀层和铜箔层的丙烯酸板沉入25%的过硫酸铵溶液中,此时没有油墨覆盖的铜被溶液腐蚀,只剩下图样覆盖后的铜箔。所有未被覆盖的铜被蚀刻后,将板从溶液中取出,然后用水冲洗残留的溶液,用浸润过纯丙酮的海绵轻轻擦去转移留下的墨水。
54.步骤六:组装所有层。参见图8,重复前序五个步骤,完成另一半的传感器蒙皮,将
去除塑封薄膜的压力传感器按指定位置粘附在蒙皮上,使用铜箔胶带将导线连接到两个铜电极层的触点上。从丙烯酸板上剥下两张传感器蒙皮,借助图样的中心位置将它们结合在一起,然后用加热层压机将所有层密封在一起,并去除透明tpu层的多余材料,获得分布式薄膜压力传感器。
55.步骤七:组装臂环。参见图9,完成分布式薄膜压力传感器的制备后,按照测点的分布要求,将薄膜压力传感器按指定位置关系连接组合,并贴合在由导电织物制备而成的导电臂环上,从而使得设计的臂环同时能够获取测点压力以及人体手臂形态学参数变化。
56.在一个实施例中,无线传输模块可包括蓝牙模块和wifi数据传输模块,数据处理模块通过蓝牙模块与外部终端设备无线通信,数据处理模块通过wifi数据传输模块与上位机进行无线通信。进一步地,数据处理模块可采用基于stm32f4系列芯片进行开发定制,包括stm32f407zgt6主控芯片和a/d芯片。
57.在本实施例中,外部终端设备可以为手机、电脑等移动终端;数据处理模块中的a/d芯片用于将信号调理模块210传输的多通道模拟信号转换为数字信号,再通过无线传输模块将转换后的数字信号发送到接收端(上位机、手机等),整个数据传输转换的过程由数据处理模块220完成,数据解析部分由上位机50完成。
58.在一个实施例中,信号分析盒200内还设有充电式电源模块,充电式电源模块包括可充电锂电池和电源稳压单元,可充电锂电池与电源稳压单元电相连,电源稳压单元通过电源线为肌力信号测点、数据处理模块以及信号调理模块供电。
59.在本实施例中,信号分析盒200中的电源模块可只包括锂电池,锂电池通过电源线分别为肌力信号测点、信号分析盒中的信号调理模块、数据处理模块供电,当锂电池电量不足或没电时,更换新的锂电池即可;当然,也可采用充电式电源模块,包括可充电锂电池和电源稳压单元,通过电源稳压单元为各模块提供稳定的供电电压,当可充电式锂电池电量不足或没电时,只需要通过充电线连接其充电接口,即可完成充电。相比于只采用锂电池供电,可有效保证充电的连续性和安全性。
60.在一个实施例中,信号分析盒200的外壳可由韧性尼龙与微碳纤维复合材料3d打印而成。
61.在本实施例中,参见图10和图11,信号分析盒200的外壳可采用长方体结构,其内的信号调理模块210和数据处理模块220集成安装在该壳体内,并对应安装在间隔设置的两块板卡上,即信号调理模块210安装在信号调理板卡21上,数据处理模块220安装在数据处理板卡22上,两块板卡通过板卡通信线20电相连;其内的无线传输模块230和数据处理模块220可集成在同一块板卡(数据处理板卡22)上,便于数据处理模块220将处理后的信号发送至无线传输模块230;且数据传输线23可设置在外壳的一侧,用于与多个肌力信号测点电相连。进一步地,信号分析盒200内的电源模块可单独设置在一个方形壳体240内,并安装在信号分析盒200的外壳上,该方形壳体240的一侧设有电源线24,用于为多个肌力信号测点供电。电源模块单独设置,可有效避免电源模块供电过程中散发的热量对信号调理模块210、数据处理模块220的正常工作造成影响。
62.本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。