1.本发明涉及机器人技术领域,具体涉及一种水上微型柔性机器人及控制方法。
背景技术:
2.21世纪是开发海洋的世纪,海洋占据了地球71%的面积,蕴藏着大量的生物资源和矿产资源,是未来人类赖以生存的环境。随着陆地的开发趋近于饱和,越来越多的人将目光投向了海洋。海洋给人更多的印象还是神秘与危险,海洋的开发就伴随着危险与机遇。水上机器人的开发大有前景,未来水上机器人可用于海洋搜救,水上预警,水上侦查,水质检测等领域。
3.现有机器人是基于马达驱动机器人运动,例如申请号为201910095877.6中公开了一种用于水中救援的智能机器人及其控制方法,其驱动装置包括水平驱动电机、垂直驱动电机、水平推进器及垂直推进器;水平驱动电机设置于壳体尾部,垂直驱动电机设置于壳体尾部,水平推进器设置于壳体尾部,垂直推进器设置于壳体尾部;由于其驱动结构复杂,传动复杂,导致机器人整体庞大;还有机器人使刚性结构,与外界环境冲击时,极易损毁机器人。
技术实现要素:
4.针对现有技术中的上述不足,本发明提供了一种水上微型柔性机器人及控制方法,其目的是解决现有机器人驱动结构复杂,传动复杂,导致机器人整体庞大;还有机器人是刚性结构,与外界环境冲击时,极易损毁机器人的问题。
5.为了实现上述发明目的,本发明采用如下技术方案:
6.第一方面,提供了一种水上微型柔性机器人,其包括柔性执行器和设置在柔性执行器上的至少两个柔性驱动器;
7.柔性驱动器包括层叠设置在柔性执行器上且位于下层的压电薄膜和上层的非压电薄膜,所述压电薄膜的上下表面分别镀有用于连接移相式信号发生器正负极的导电层;
8.所述柔性执行器包括两个呈柔性且平行的竖板、设置在竖板上的绞丝结构、连接两个绞丝结构的安装板和设置在竖板上的阀门;两个柔性驱动器水平安装在两个所述安装板上。
9.本发明的有益效果为:在本方案中,本机器人相对于背景技术,本机器人的柔性驱动器和柔性执行器均采用柔性材质,防撞击能力强,不易损毁;采用柔性驱动器驱动本机器人动力,相对现有的马达作为动力,本柔性驱动器结构简单,传动简单;而且是通过电信号的方式控制柔性驱动器产生动力,这样减少了传动方面的故障,可靠性强。
10.进一步,所述柔性驱动器的长宽高为3cm*1.5cm*0.015cm;所述压电薄膜的材质为pvdf,且厚度为12um;所述非压电薄膜的材质为pet,且厚度为50um。
11.进一步,所述竖板中部开有缺口,所述绞丝结构设置在所述缺口中;
12.所述绞丝结构包括连接件,所述连接件每侧与其邻近的缺口侧壁上均设置有绞丝
弹簧。
13.进一步,竖板的材质为pi,且厚度为50um。
14.进一步,每块所述竖板上的阀门的数量为两个,且沿竖板中部对称设置;阀门为单方向自锁阀。
15.进一步,安装板的材质为碳纤维。
16.第二方面,提供了一种水上微型柔性机器人的控制方法,其包括以下步骤:
17.s1、将柔性机器人放在水上;
18.s2、移相式信号发生器分别给柔性驱动器(4)发送存在相位差的信号;
19.s3、接收存在相位差信号的至少两个柔性驱动器(4)驱动柔性执行器发生机械振动,在水面上产生不同相位的水波纹;
20.s4、不同相位的水波纹发生干涉,波纹干涉的叠加区反作用到柔性执行器,使机器人完成预设动作。
21.进一步,在s4中,预设动作包括机器人前向行驶、向后行驶、向左前行驶、向右前行驶、向左后行驶、向右后行驶、逆时针旋转和顺时针旋转;
22.柔性执行器在水面上机械震动产生四个水波源,分别标记为a波源、b波源、c波源和d波源,且对应的相位分别为φ
a
、φ
b
、φ
c
和φ
d
;
23.机器人前向行驶时,c波源和d波源产生对称波纹,a波源和b波源的相位差φ
a
‑
φ
b
=0;
24.机器人后向行驶时,a波源和b波源产生对称波纹,c波源和d波源的相位差φ
c
‑
φ
d
=0;
25.机器人向左前行驶时,c波源和d波源产生对称波纹,a波源和b波源的相位差φ
a
‑
φ
b
>0;
26.机器人向右前行驶时,c波源和d波源产生对称波纹,a波源和b波源的相位差φ
a
‑
φ
b
<0;
27.机器人向左后行驶时,a波源和b波源产生对称波纹,c波源和d波源的相位差φ
c
‑
φ
d
>0;
28.机器人向向右行驶时,a波源和b波源产生对称波纹,c波源和d波源的相位差φ
c
‑
φ
d
<0;
29.机器人逆时针旋转时,a波源和b波源的相位差φ
a
‑
φ
b
>0;c波源和d波源的相位差φ
c
‑
φ
d
<0;
30.机器人顺时针旋转时,a波源和b波源的相位差φ
a
‑
φ
b
<0;c波源和d波源的相位差φ
c
‑
φ
d
>0。
31.除了上面所描述的本发明解决的技术问题、构成技术方案的技术特征以及由这些技术方案的技术特征所带来的有益效果外,本发明提供所能解决的其他技术问题、技术方案中包含的其他技术特征以及这些技术特征带来的有益效果,将在具体实施方式中作出进一步详细的说明。
附图说明
32.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实
施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
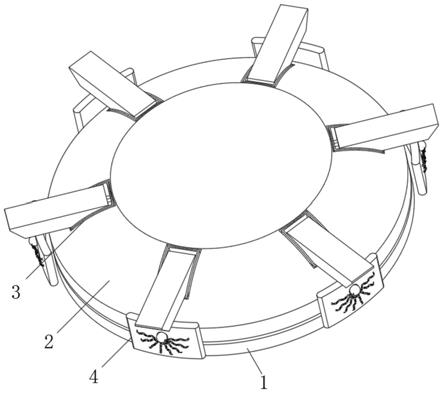
33.图1为本发明中一种水上微型柔性机器人的结构示意图。
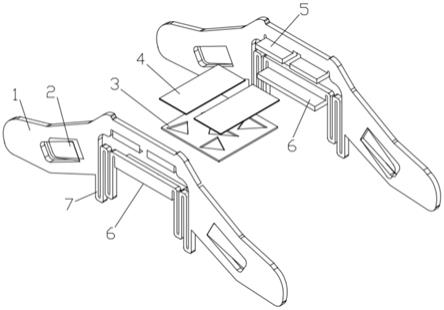
34.图2为竖板的主视图。
35.图3为机器人前进的波源干涉叠加图。
36.图4为机器人后退的波源干涉叠加图。
37.图5为机器人左前行驶的波源干涉叠加图。
38.图6为机器人右前行驶的波源干涉叠加图。
39.图7为机器人左后行驶的波源干涉叠加图。
40.图8为机器人右后行驶的波源干涉叠加图。
41.图9为机器人顺时针旋转的波源干涉叠加图。
42.图10为机器人逆时针旋转的波源干涉叠加图。
43.其中:1、竖板;2、阀门;3、安装板;4、柔性驱动器;5、安装座;6、连接件;7、绞丝弹簧。
具体实施方式
44.为了使本发明的上述目的、特征和优点能够更加明显易懂,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动的前提下所获得的所有其它实施例,均属于本发明保护的范围。
45.请参考图1
‑
图10,本方案提供了一种水上微型柔性机器人,其包括柔性执行器和设置在柔性执行器上的至少两个柔性驱动器4;柔性驱动器4包括层叠设置在柔性执行器上且位于下层的压电薄膜和上层的非压电薄膜,压电薄膜的上下表面分别镀有用于连接移相式信号发生器正负极的导电层,导电层优选金或银或铜电极层;柔性执行器包括两个呈柔性且平行的竖板1、设置在竖板1上的绞丝结构、连接两个绞丝结构的安装板3和设置在竖板1上的阀门2;两个柔性驱动器4水平安装在两个所述安装板3上。
46.在本方案中,本机器人相对于背景技术,本机器人的柔性驱动器和柔性执行器均采用柔性材质,防撞击能力强,不易损毁;采用柔性驱动器4驱动本机器人动力,相对现有的马达作为动力,本柔性驱动器4结构简单,传动简单;而且是通过电信号的方式控制柔性驱动器4产生动力,这样减少了传动方面的故障,可靠性强。
47.柔性驱动器4的工作原理:移相式信号发生器接通交流电,通过移相式信号发生器改变输出到导电层的电信号的振幅,引起压电薄膜的伸长或缩短,使叠加设置的压电薄膜和非压电薄膜的曲率半径同时往复变化,作为柔性驱动器4的动力。具体的,参考图1,柔性驱动器4可以往复向下弯曲(压电薄膜的伸长)或恢复(压电薄膜的缩短),作为柔性机器人的动力。
48.优选柔性驱动器4的长宽高为3cm*1.5cm*0.015cm;压电薄膜的材质为pvdf,且厚度为12um;所述非压电薄膜优选绝缘板,且绝缘板材质优选为pet,且厚度为50um。这样的柔性驱动器4结构简单,体积小巧,重量轻,抗弯抗冲击能力强。
49.还有背景技术中的机器人由两个电机配合推进器驱动,会产生高分贝噪音,隐蔽
性差,由于本柔性驱动器的自身结构特性,一般在20
‑
30hz下工作,20
‑
30hz属于低频段,可以使本机器人在低噪音下工作;还可在狭小的水面空间中移动作业。
50.优选,参考图1和2,可以在竖板1上设置有两个水平的安装座5,两个柔性驱动器4可以沾在安装座5上。柔性驱动器4优选两个,参考如图1的方式安装在柔性执行器上。
51.竖板1中部开有缺口,绞丝结构设置在缺口中;绞丝结构包括连接件6,连接件6每侧与其邻近的缺口侧壁上均设置有绞丝弹簧7。绞丝弹簧7可以减小连接处的刚性,同时吸收柔性驱动器4弯曲时产生的能量,使安装板处于平稳状态,保证安装板上的设备稳定工作;
52.具体的,竖板1上设置的连接件6、绞丝弹簧7、安装座5可以通过剪切设备剪切出如图1和2的整体竖板1,且竖板1为模拟翅膀的形状。
53.优选竖板1的材质为pi,且厚度为50um;耐高温耐低温,热分解温度达600℃,抗张强度都在100mpa以上,用在本机器人上,可以增强机器人的机械性能。
54.优选每块竖板1上的阀门2的数量为两个,且沿竖板1中部对称设置;阀门2为单方向自锁阀;具体的,阀门2开向背离两竖板的之间,同一竖板2的两个阀门的开口是反向的,这样柔性执行器在往后摆动的半程水流能通过两个竖板2上的一组阀门2,另一组阀门2受到水压处于关闭状态;在往前摆动的半程水流可以流过两个竖板2上的另一组阀门2,一组阀门2收到水压处于关闭状态;利于在水面更有效地前进或后退。
55.优选安装板3的材质为碳纤维,安装板3固定连接在连接件6上,使两个竖板1固定,安装板3上还可以安装移相式信号发生器等设备。
56.至此已完成对水上微型柔性机器人的结构的描述,下面接着对水上微型柔性机器人的控制方法进行说明,其包括以下步骤:
57.s1、将柔性机器人放在水上;
58.s2、移相式信号发生器分别给柔性驱动器(4)发送存在相位差的信号;
59.s3、接收存在相位差信号的至少两个柔性驱动器(4)驱动柔性执行器发生机械振动,在水面上产生不同相位的水波纹;
60.s4、不同相位的水波纹发生干涉,波纹干涉的叠加区反作用到柔性执行器,使机器人完成预设动作。
61.具体的,当至少两个柔性驱动器4安装在柔性执行器上时,调整两个柔性驱动器4间的相对馈电相位存在差异,改变至少两个柔性驱动器4往复向下弯曲或恢复的频率,从而带动柔性执行器做向内收缩或者恢复的动作,进而使机器人完成预设动作。
62.在步骤s2中,控制器通过远程信号控制移相式信号发生器;其中远程信号为无线信号、红外线信号或蓝牙信号等中的任意一种。
63.在s4中,预设动作包括机器人的前向行驶、向后行驶、向左前行驶、向右前行驶、向左后行驶、向右后行驶、逆时针旋转和顺时针旋转;
64.柔性执行器在水面上机械震动产生四个水波源,四个水波源为a波源、b波源、c波源和d波源,且对应的相位分别为φ
a
、φ
b
、φ
c
和φ
d
;
65.在本方案中,优选两个柔性驱动器4,两个柔性驱动器4水平安装在竖板1上,两个竖板1与水面形成四个接触部,分别给两个移相式柔性驱动器4施加电信号,两个柔性驱动器4接受电信号后,并驱动柔性执行器的四个接触部在水面上机械震动产生四个波源,四个
波源可命名为a波源、b波源、c波源和d波源,四个波源的相位分别为φ
a
、φ
b
、φ
c
和φ
d
,靠近a波源的接触部可命名为a接触部,同理可得b接触部、c接触部和d接触部;a接触部的方向可命名为左前,同理可得b接触部为右前、c接触部为右后和d接触部为左后,且a接触部与d接触部为一竖板2上的,b接触部与c接触部为另一竖板2上的。
66.当机器人前向行驶时,c波源和d波源产生对称波纹(波纹抵消不影响行动),a波源和b波源的相位差φ
a
‑
φ
b
=0,波纹叠加后的加强方向如图3;
67.当机器人向后行驶时,a波源和b波源产生对称波纹(波纹抵消不影响行动),c波源和d波源的相位差φ
c
‑
φ
d
=0;波纹叠加后的加强方向如图4;
68.当机器人向左前行驶时,c波源和d波源产生对称波纹(波纹抵消不影响行动),a波源和b波源的相位差φ
a
‑
φ
b
>0;波纹叠加后的加强方向如图5,机器人受到到水面的反作用力向左前进;
69.当机器人向右前行驶时,c波源和d波源产生对称波纹(波纹抵消不影响行动),a波源和b波源的相位差φ
a
‑
φ
b
<0;波纹叠加后的加强方向如图6,机器人受到到水面的反作用力向右前进;
70.当机器人向左后行驶时,a波源和b波源产生对称波纹(波纹抵消不影响行动),c波源和d波源的相位差φ
c
‑
φ
d
>0;波纹叠加后的加强方向如图7,机器人受到到水面的反作用力向左后退;
71.当机器人向右后行驶时,a波源和b波源产生对称波纹(波纹抵消不影响行动),c波源和d波源的相位差φ
c
‑
φ
d
<0;波纹叠加后的加强方向如图8,机器人受到到水面的反作用力向右后退;
72.当机器人逆时针旋转时,a波源和b波源的相位差φ
a
‑
φ
b
>0;c波源和d波源的相位差φ
c
‑
φ
d
<0;机器人逆时针旋转,如图9;
73.当机器人顺时针旋转时,a波源和b波源的相位差φ
a
‑
φ
b
<0;c波源和d波源的相位差φ
c
‑
φ
d
>0;机器人顺时针旋转,如图10。
74.综上可得,本机器人的效果为:
75.机器人具有体积小、重量轻、装配简单,其隐蔽性和抗冲击能力强,整体结构柔性且具有一定的受压受拉能力。
76.当使用至少两个以上的柔性驱动器4时,即使有个别驱动器失效,仍然不影响机器人的运动。
77.多个柔性驱动器4协同联合工作,使产生波纹的干涉叠加可控区域更加准确,反作用于机器人上,实现高精密控制机器人完成多种复杂的动作。
78.多个柔性驱动器4既可以独立工作,又可以互相之间协同配合,使机器人在水面上完成多种动作。柔性驱动器4所接受的是周期信号,优选电信号,但其他相位可调信号也可以。
79.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。