1.本发明涉及海洋打捞领域,更具体地,涉及一种声学打捞装置及方法。
背景技术:
2.随着科学技术的不断发展,越来越多的国家认识到开发海洋资源的重要性,而要进行海洋资源的开发利用,则首先避免不了对海洋科学数据的监测与采集,其中,海洋水下锚系则为一种能有效监测及长期获取海洋科学数据的海洋工程装备,同时为了能有效监控水下锚系在海洋中的具体位置以及方便回收,水下锚系上通常会设置有声学释放器,所述声学释放器通过接收特定频率的声学命令来驱动释放器内部的电机转子,达到锚钩与底部重块解脱的效果,协助日后回收时,整串锚系与底部锚块的分离。
3.但随着海事活动频繁以及海上作业的增多,受飓风或事故等因素影响,越来越多的水下锚系无法正常进行回收,遗失在海底,而海洋环境复杂多变,无法依靠人工潜水的方式进行直接打捞,从而导致科学仪器以及数据的损失,以及对其他海洋工作的影响。而使用普通的打捞工具进行打捞,因为无法得知水下锚系在海洋中的具体位置,只能通过增大打捞范围以及增多打捞工具的数量,从而轻微地提高打捞成功率,这种打捞方式效率低下,成功率低,耗费大量人力物力财力。
技术实现要素:
4.本发明旨在克服上述现有技术的至少一种缺陷(不足),提供一种声学打捞装置及方法,用于解决现有打捞工具无法精准定位水下锚系,从而造成打捞效率以及成功率低下的问题。
5.本发明采取的技术方案是,一种声学打捞装置,与水上单元通信连接,用于打捞水下声学释放器,包括打捞主体、连接于所述打捞主体尾部的吊钩以及连接于所述吊钩的柔性延伸部,所述打捞主体的外部设置有方向控制机构,所述打捞主体的内部设置有控制系统、声学感应机构、动力机构以及电源,所述控制系统、声学感应机构、动力机构均与所述电源相连;
6.所述声学感应机构,与所述控制系统连接,用于接收所述水下声学释放器发出的声学信号,根据所述声学信号持续测定所述打捞主体与所述水下声学释放器之间的距离,并生成控制信号发送至所述控制系统,以及生成打捞信号发送至所述水上单元;
7.所述控制系统,与所述动力机构连接,用于接收所述控制信号,根据所述控制信号控制所述动力机构,以使所述动力机构驱动所述方向控制机构控制所述打捞主体接近所述水下声学释放器。
8.本发明中,打捞主体用于容纳控制系统、声学感应机构以及动力机构,防止装置内各机构被海水浸入而造成功能性损坏;连接在打捞主体上的吊钩以及连接于吊钩上的柔性延伸部用于实现该打捞装置的布放以及回收;方向控制机构用于通过动力机构的驱动实现该打捞装置在海洋中的方向控制及姿态调整;动力机构用于为方向控制机构提供动力驱
动;而声学感应机构,可以用于实时感应水下声学释放器释放的声学信号,根据声学信号持续精准测定自身打捞装置与水下声学释放器也就是水下锚系之间的距离,并生成控制信号发送给控制系统,而控制系统则用于接收控制信号,根据控制信号控制动力机构驱动方向控制机构,从而控制所述打捞装置不断自主跟踪靠近水下声学释放器,当打捞装置完全接近水下声学释放器时,声学感应机构又生成打捞信号,发送给水上单元,水上单元可以是水上的操作人员或其他可接收打捞信号的操作工具,水上单元获得打捞信号,收紧连接于打捞主体上的柔性延伸部,从而完成整个打捞工作,其中柔性延伸部可以是缆绳或其他用于连接的柔性延伸工具。由此可见,本发明可有效实现打捞装置对水下锚系的精准定位与自动跟踪,大大提升打捞效率以及成功率,减少人力物力财力的浪费。
9.进一步的,所述声学感应机构包括第一声学感应装置以及第二声学感应装置,所述第一声学感应装置以及第二声学感应装置均与所述控制系统连接;
10.所述第一声学感应装置,设置在所述打捞主体头部,用于接收所述水下声学释放器发出的声学信号,根据所述声学信号持续测定所述打捞主体与所述水下声学释放器之间的距离,生成控制信号发送至所述控制系统;
11.所述第二声学感应装置,设置在所述打捞主体侧面,用于接收所述水下声学释放器发出的声学信号,根据所述声学信号持续测定所述打捞主体与所述水下声学释放器之间的距离,生成打捞信号发送至所述水上单元。
12.进一步的,所述第一声学感应装置的信号收发方向为所述打捞主体前进方向,所述第二声学感应装置的信号收发方向为垂直于所述打捞主体前进方向。
13.本发明中,设置两个不同方向的声学感应装置,其中第一声学感应装置主要用于接收所述水下声学释放器发出的声学信号后与该打捞装置内部的控制系统进行信号传输,第二声学感应装置主要用于接收所述水下声学释放器发出的声学信号后与水上单元进行信号传输,这是因为信号传输时具备一定的方向性,设置多个不同方向的声学感应装置能有效针对不同方向的信号接收端进行信号发送,有效加快信号的传输速率,从而进一步的提高打捞效率。
14.进一步的,所述方向控制机构包括升降控制舵、左右控制舵以及螺旋桨,所述升降控制舵、左右控制舵以及螺旋桨均设置于所述打捞主体的外部,并且均与所述动力机构连接。
15.进一步的,所述动力机构包括升降控制电机、左右控制电机以及推进电机;
16.所述升降控制电机与所述升降控制舵连接,所述左右控制电机与所述左右控制舵连接,所述推进电机与所述螺旋桨连接;
17.所述升降控制电机、左右控制电机以及推进电机还均与所述控制系统连接,用于根据所述控制系统接收到的控制信号,分别驱动所述升降控制舵、左右控制舵以及螺旋桨,控制所述打捞主体接近所述水下声学释放器。
18.本发明中,打捞主体要实现在海洋中不断接近水下声学释放器的位置,则需要实时根据控制系统接收到的控制信号不断地进行方向的调整。其中,本发明中,推进电机可以通过驱动螺旋桨进行顺时针或逆时针转动,则可以实现打捞主体的前进或后退方向的控制;而升降控制电机可以通过驱动升降控制舵在竖直方向上下摆动,则可以实现打捞主体在竖直方向上的升降控制;左右控制电机可以通过驱动左右控制舵在水平方向左右摆动,
则可以实现打捞主体在水平方向上的左右控制。
19.进一步的,所述控制系统包括主控系统以及姿态控制仪;
20.所述主控系统,分别与所述声学感应机构以及推进电机连接,用于接收所述控制信号,根据所述控制信号控制所述推进电机,以使所述推进电机驱动所述螺旋桨,控制所述打捞主体接近所述水下声学释放器;
21.所述姿态控制仪与所述升降控制电机以及左右控制电机连接;
22.所述主控系统,还与所述姿态控制仪连接,用于接收所述控制信号,根据所述控制信号控制所述姿态控制仪,以使所述姿态控制仪控制所述升降控制电机以及左右控制电机,所述升降控制电机以及左右控制电机驱动所述升降控制舵以及所述左右控制舵,控制所述打捞主体接近所述水下声学释放器。
23.进一步的,所述声学打捞装置还包括多个抓钩,所述多个抓钩在所述打捞主体尾部周向分布。
24.进一步的,所述螺旋桨设置于所述打捞主体尾部,所述吊钩通过所述抓钩连接于所述打捞主体尾部。
25.本发明中,在打捞主体尾部还设置有多个抓钩,抓钩的设置可有效辅助该打捞装置对水下锚系的打捞,在水上单元收紧柔性延伸部时,抓钩也可以钩住水下锚系,进一步的加固打捞的稳定性,防止在回收过程中水下锚系脱离打捞装置。此外,吊钩通过抓钩连接于所述打捞主体尾部,可有效避让设置于打捞主体尾部的螺旋桨,防止吊钩影响螺旋桨的转动。
26.进一步的,所述打捞主体内部还设置有重力平衡块,所述重力平衡块安装于所述控制系统、声学感应机构、动力机构的下方。
27.本发明中,在打捞主体内部其他机构的下方还设置了重力平衡块,能有效增加该装置的重力,使得该装置能被潜入海洋之中,且在该装置在海洋中进行移动时,起到一定的平衡浮力的作用。
28.另一方面,本发明还提供了一种声学打捞方法,应用于所述的声学打捞装置,包括以下步骤:
29.设置所述声学感应机构的信号收发频率与所述水下声学释放器相配对;
30.所述声学感应机构在所述信号收发频率下接收所述水下声学释放器发送的声学信号,根据所述声学信号持续测定所述打捞主体与所述水下声学释放器之间的距离,生成控制信号并发送至所述控制系统;
31.所述控制系统根据所述控制信号控制所述动力机构,以使所述动力机构驱动所述方向控制机构控制所述打捞主体接近所述水下声学释放器;
32.当所述声学感应机构测定的所述距离为8~12m时,所述控制系统控制所述动力机构,以使所述动力机构驱动所述方向控制机构控制所述打捞主体围绕所述水下声学释放器盘旋15
‑
25圈;
33.当所述声学感应机构测定的所述距离为0时,所述控制系统控制所述动力机构停止运行,以使所述动力机构驱动所述方向控制机构控制所述打捞主体停止盘旋;
34.所述声学感应机构生成打捞信号并发送至所述水上单元;
35.所述水上单元收紧所述柔性延伸部,实现对所述水下声学释放器的打捞。
36.与现有技术相比,本发明的有益效果为:本发明在打捞装置内部设置声学感应机构,可以实时接收水下声学释放器释放的声学信号,根据声学信号持续精准测定打捞主体与水下声学释放器之间的距离,生成控制信号至控制系统使得打捞主体接近水下声学释放器,以及生成打捞信号至水上单元,从而完成整个打捞工作,本发明可有效实现打捞装置对水下锚系的精准定位与自动跟踪,大大提升打捞效率以及成功率,减少人力物力财力的浪费。
附图说明
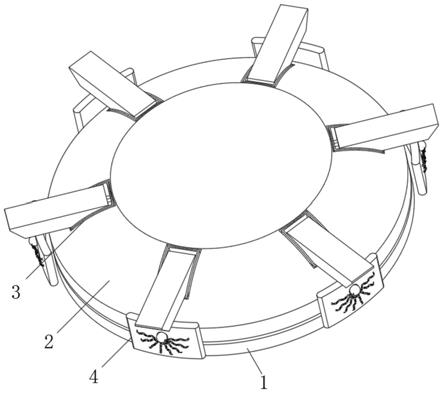
37.图1为本发明的立体结构图。
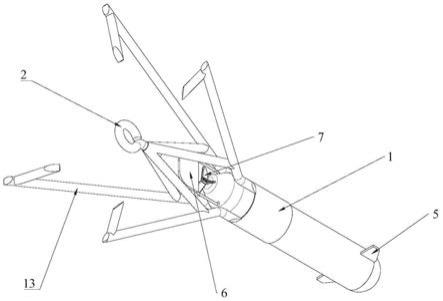
38.图2为本发明的水平方向透视图。
39.图3为本发明的竖直方向透视图。
40.图4为本发明的方法流程图。
41.附图标记说明:打捞主体1,吊钩2,第一声学感应装置3,第二声学感应装置4,升降控制舵5,左右控制舵6,螺旋桨7,升降控制电机8,左右控制电机9,推进电机10,主控系统11,姿态控制仪12,抓钩13,重力平衡块14。
具体实施方式
42.本发明附图仅用于示例性说明,不能理解为对本发明的限制。为了更好说明以下实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;对于本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。
43.如图1至图3所示,本实施例提供一种声学打捞装置,与水上单元通信连接,用于打捞水下声学释放器,包括打捞主体1、连接于所述打捞主体1尾部的吊钩2以及连接于所述吊钩2的柔性延伸部,所述打捞主体1的外部设置有方向控制机构,所述打捞主体1的内部设置有控制系统、声学感应机构、动力机构以及电源,所述控制系统、声学感应机构、动力机构均与所述电源相连;所述声学感应机构,与所述控制系统连接,用于接收所述水下声学释放器发出的声学信号,根据所述声学信号持续测定所述打捞主体1与所述水下声学释放器之间的距离,并生成控制信号发送至所述控制系统,以及生成打捞信号发送至所述水上单元;所述控制系统,与所述动力机构连接,用于接收所述控制信号,根据所述控制信号控制所述动力机构,以使所述动力机构驱动所述方向控制机构控制所述打捞主体1接近所述水下声学释放器。
44.本实施例中,打捞主体1用于容纳控制系统、声学感应机构以及动力机构,防止装置内各机构被海水浸入而造成功能性损坏;连接在打捞主体1上的吊钩2以及连接于吊钩2上的柔性延伸部用于实现该打捞装置的布放以及回收;方向控制机构用于通过动力机构的驱动实现该打捞装置在海洋中的方向控制及姿态调整;动力机构用于为方向控制机构提供动力驱动;而声学感应机构,可以用于实时感应水下声学释放器释放的声学信号,根据声学信号持续精准测定自身打捞装置与水下声学释放器也就是水下锚系之间的距离,并生成控制信号发送给控制系统,而控制系统则用于接收控制信号,根据控制信号控制动力机构驱动方向控制机构,从而控制所述打捞装置不断自主跟踪靠近水下声学释放器,当打捞装置完全接近水下声学释放器时,声学感应机构又生成打捞信号,发送给水上单元,水上单元可
以是水上的操作人员或其他可接收打捞信号的操作工具,水上单元获得打捞信号,收紧连接于打捞主体上的柔性延伸部,从而完成整个打捞工作,其中柔性延伸部可以是缆绳或其他用于连接的柔性延伸工具。由此可见,本实施例中该打捞装置可有效实现打捞装置对水下锚系的精准定位与自动跟踪,大大提升打捞效率以及成功率,减少人力物力财力的浪费。
45.进一步的,所述声学感应机构包括第一声学感应装置3以及第二声学感应装置4,所述第一声学感应装置3以及第二声学感应装置4均与所述控制系统连接;所述第一声学感应装置3,设置在所述打捞主体1头部,用于接收所述水下声学释放器发出的声学信号,根据所述声学信号持续测定所述打捞主体1与所述水下声学释放器之间的距离,生成控制信号发送至所述控制系统;所述第二声学感应装置4,设置在所述打捞主体1侧面,用于接收所述水下声学释放器发出的声学信号,根据所述声学信号持续测定所述打捞主体1与所述水下声学释放器之间的距离,生成打捞信号发送至所述水上单元。
46.进一步的,所述第一声学感应装置3的信号收发方向为所述打捞主体1前进方向,所述第二声学感应装置4的信号收发方向为垂直于所述打捞主体1前进方向。
47.本实施例中,设置两个不同方向的声学感应装置,其中第一声学感应装置3主要用于接收所述水下声学释放器发出的声学信号后与该打捞装置内部的控制系统进行信号传输,第二声学感应装置4主要用于接收所述水下声学释放器发出的声学信号后与水上单元进行信号传输,这是因为信号传输时具备一定的方向性,设置多个不同方向的声学感应装置能有效针对不同方向的信号接收端进行信号发送,有效加快信号的传输速率,从而进一步的提高打捞效率。
48.进一步的,所述方向控制机构包括升降控制舵5、左右控制舵6以及螺旋桨7,所述升降控制舵5、左右控制舵6以及螺旋桨7均设置于所述打捞主体1的外部,并且均与所述动力机构连接。
49.进一步的,所述动力机构包括升降控制电机8、左右控制电机9以及推进电机10;所述升降控制电机8与所述升降控制舵5连接,所述左右控制电机9与所述左右控制舵6连接,所述推进电机10与所述螺旋桨7连接;所述升降控制电机8、左右控制电机9以及推进电机10还均与所述控制系统连接,用于根据所述控制系统接收到的控制信号,分别驱动所述升降控制舵5、左右控制舵6以及螺旋桨7,控制所述打捞主体1接近所述水下声学释放器。
50.本实施例中,打捞主体1要实现在海洋中不断接近水下声学释放器的位置,则需要实时根据控制系统接收到的控制信号不断地进行方向的调整。其中,本实施例中,推进电机10可以通过驱动螺旋桨7进行顺时针或逆时针转动,则可以实现打捞主体1的前进或后退方向的控制;而升降控制电机8可以通过齿轮组等其他零件驱动升降控制舵5在竖直方向上下摆动,则可以实现打捞主体1在竖直方向上的升降控制;左右控制电机9可以通过齿轮组等其他零件驱动左右控制舵6在水平方向左右摆动,则可以实现打捞主体1在水平方向上的左右控制。
51.进一步的,所述控制系统包括主控系统11以及姿态控制仪12;所述主控系统11,分别与所述声学感应机构以及推进电机10连接,用于接收所述控制信号,根据所述控制信号控制所述推进电机10,以使所述推进电机10驱动所述螺旋桨7,控制所述打捞主体1接近所述水下声学释放器;所述姿态控制仪12与所述升降控制电机8以及左右控制电机9连接;所述主控系统11,还与所述姿态控制仪12连接,用于接收所述控制信号,根据所述控制信号控
制所述姿态控制仪12,以使所述姿态控制仪12控制所述升降控制电机8以及左右控制电机9,所述升降控制电机8以及左右控制电机9驱动所述升降控制舵5以及所述左右控制舵6,控制所述打捞主体1接近所述水下声学释放器。
52.进一步的,所述声学打捞装置还包括多个抓钩13,所述多个抓钩13在所述打捞主体1尾部周向分布。
53.进一步的,所述螺旋桨7设置于所述打捞主体1尾部,所述吊钩2通过所述抓钩13连接于所述打捞主体1尾部。
54.本实施例中,在打捞主体1尾部还设置有多个抓钩13,抓钩13的设置可有效辅助该打捞装置对水下锚系的打捞,在水上单元收紧柔性延伸部时,抓钩13也可以钩住水下锚系,进一步的加固打捞的稳定性,防止在回收过程中水下锚系脱离打捞装置。此外,吊钩2通过抓钩13连接于所述打捞主体1尾部,可有效避让设置于打捞主体1尾部的螺旋桨7,防止吊钩2影响螺旋桨7的转动。
55.进一步的,所述打捞主体1内部还设置有重力平衡块14,所述重力平衡块14安装于所述控制系统、声学感应机构、动力机构的下方。
56.本实施例中,在打捞主体1内部其他机构的下方还设置了重力平衡块14,能有效增加该装置的重力,使得该装置能被潜入海洋之中,且在该装置在海洋中进行移动时,起到一定的平衡浮力的作用。
57.另一方面,如图4所示,本实施例还提供了一种声学打捞方法,应用于所述的声学打捞装置,包括以下步骤:
58.s1、设置所述声学感应机构的信号收发频率与所述水下声学释放器相配对;
59.s2、所述声学感应机构在所述信号收发频率下接收所述水下声学释放器发送的声学信号,根据所述声学信号持续测定所述打捞主体与所述水下声学释放器之间的距离,生成控制信号并发送至所述控制系统;
60.s3、所述控制系统根据所述控制信号控制所述动力机构,以使所述动力机构驱动所述方向控制机构控制所述打捞主体接近所述水下声学释放器;
61.s4、当所述声学感应机构测定的所述距离为8~12m时,所述控制系统控制所述动力机构,以使所述动力机构驱动所述方向控制机构控制所述打捞主体围绕所述水下声学释放器盘旋15
‑
25圈,具体地,本实施例中,可以设置为当所述声学感应机构测定的所述距离为10m时,所述控制系统控制所述动力机构,以使所述动力机构驱动所述方向控制机构控制所述打捞主体围绕所述水下声学释放器盘旋20圈;
62.s5、当所述声学感应机构测定的所述距离为0时,所述控制系统控制所述动力机构停止运行,以使所述动力机构驱动所述方向控制机构控制所述打捞主体停止盘旋;
63.s6、所述声学感应机构生成打捞信号并发送至所述水上单元;
64.s7、所述水上单元收紧所述柔性延伸部,实现对所述水下声学释放器的打捞。
65.显然,本发明的上述实施例仅仅是为清楚地说明本发明技术方案所作的举例,而并非是对本发明的具体实施方式的限定。凡在本发明权利要求书的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明权利要求的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。