1.本发明关于形状导出装置及卸货装置。本技术依据2019年4月9日所提出的日本专利申请特愿第2019
‑
074026号及日本专利申请特愿第2019
‑
074030号主张优先权的利益,并将其内容援用于本技术中。
背景技术:
2.以往,已有提出一种技术,量测到达物体的距离,所量测到的距离越短就使用越大的加权系数来进行加权,而在加权后所得的点数的合计为既定值以上时,判定为有物体(例如,专利文献1)。
3.[现有技术文献]
[0004]
[专利文献]
[0005]
(专利文献1)日本特开2017
‑
32329号公报。
技术实现要素:
[0006]
(发明所欲解决的技术问题)
[0007]
然而,引用文献1所记载的技术中,虽可判定有无物体,但无法连物体的形状都导出。
[0008]
本发明为有鉴于此种技术问题而研创,目的在于提供一种可精确度良好地导出物体的形状的形状导出装置及卸货装置。
[0009]
(解决技术问题的手段)
[0010]
为了解决上述技术问题,本发明一实施方式的形状导出装置具备:区域生成部,生成作业区域,该作业区域由三维展开的多个小区域所构成;量测资料取得部,随时取得通过测距感测器量测到的物体的量测点的量测资料;资料储存部,根据量测点的量测资料,对于与量测资料对应的小区域,储存量测点的统计资料;及形状导出部,根据统计资料而导出物体的形状;其中,资料储存部根据统计资料导出比较方向;形状导出部比较沿比较方向排列的多个小区域间的统计资料,而具体指定出(判定出、辨识出)与物体的表面相当的小区域。
[0011]
资料储存部可至少导出在量测到量测点时的与测距感测器的距离为最小的量测点与测距感测器之间的比较方向,作为统计资料;形状导出部可将配置在一个小区域附近的小区域之中的位在与比较方向对应的方向的小区域作为比较对象小区域,并比较一个小区域与比较对象小区域的统计资料,据此导出物体的形状。
[0012]
资料储存部可进一步储存小区域所包含的量测点的数量,作为统计资料;形状导出部可比较一个小区域与比较对象小区域的前述量测点的数量,据此导出物体的形状。
[0013]
资料储存部可储存小区域所包含的量测点的量测时期,作为统计资料;形状导出部可比较一个小区域与比较对象小区域的量测时期,据此导出物体的形状。
[0014]
为了解决上述技术问题,本发明一实施方式的卸货装置具备:区域生成部,以船舶的特定位置为基准而生成作业区域,该作业区域由三维展开的多个小区域所构成;量测资
料取得部,随时取得通过测距感测器量测到的船舱的量测点的量测资料;资料储存部,根据量测点的量测资料,针对包含量测点的小区域,储存量测点的统计资料;及形状导出部,根据统计资料而导出船舱的形状。
[0015]
区域生成部可生成上部用的作业区域及下部用的作业区域;资料储存部可根据在通过测距感测器量测到的量测点之中,相对地被分类到上部的量测点的量测资料,对于上部用的作业区域储存统计资料;且资料储存部可根据在通过测距感测器量测到的量测点之中,相对地被分类到下部的量测点的量测资料,对于下部用的作业区域储存前述统计资料;形状导出部可根据上部用的作业区域的统计资料,导出船舱的侧部的形状,并且,根据下部用的作业区域的统计资料,导出船舱的底部的形状。
[0016]
资料储存部可根据统计资料导出比较方向;且形状导出部可比较沿比较方向排列的多个小区域间的统计资料,而具体指定出与船舱的形状相当的小区域。
[0017]
资料储存部可至少抽出在量测到量测点时的与测距感测器的距离为最小的量测点与测距感测器之间的比较方向,作为统计资料;形状导出部可将配置在一个小区域附近的小区域之中的位在与比较方向对应的方向的小区域作为比较对象小区域,并比较一个小区域与比较对象小区域的统计资料,据此导出船舱的形状。
[0018]
形状导出部可对于下部用的作业区域,从上下方向排列而配置的多个小区域之中,抽出储存有统计资料且位在最下方的小区域,并根据所抽出的小区域而导出船舱的底面的形状。
[0019]
区域生成部能够以船舶的开口部为基准而生成作业区域。
[0020]
[发明功效]
[0021]
可精确度良好地导出物体的形状。
附图说明
[0022]
图1为说明卸载器装置的概要的图。
[0023]
图2为说明卸载器装置的构成的图。
[0024]
图3为说明测距感测器的量测范围的图。
[0025]
图4为说明测距感测器的量测范围的图。
[0026]
图5为说明测距感测器的量测范围的图。
[0027]
图6为说明测距感测器的量测范围的图。
[0028]
图7为说明卸载器装置的电性构成的图。
[0029]
图8为显示导出船舱的三维形状的处理流程的流程图。
[0030]
图9为说明卸载器装置的座标系统的图。
[0031]
图10为说明卸载器装置的座标系统的图。
[0032]
图11为说明通过多个小区域所构成的作业区域的图。
[0033]
图12为说明测距感测器的量测点的图。
[0034]
图13为显示检测边缘点的情形的图。
[0035]
图14为说明将测距感测器量测的量测点分割为上部及下部的情形的图。
[0036]
图15为说明底面形状导出处理的图。
[0037]
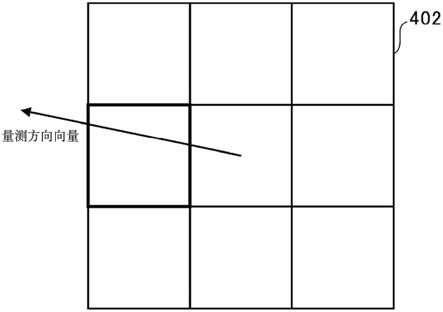
图16为说明导出与侧壁对应的小区域的图。
具体实施方式
[0038]
以下,参照附图,详细说明本发明的一实施方式。此实施方式中所揭示的尺寸、材料及其它具体的数值等仅是为了容易理解的例示,除了特别声明之外,并非用以限定本发明。另外,本说明书及附图中,对于实质具有相同的功能、构成的元件附加相同的符号而省略重复的说明,另外,与本发明无直接关系的要素则省略图示。
[0039]
图1为说明卸载器装置100的概要的图。如图1所示,作为形状导出装置及卸货装置的一例的卸载器装置100可于沿着岸壁2铺设的一对轨道3上沿轨道3的延伸方向行进。卸载器装置100将积载于停泊在岸壁2的船舶4的船舱5内的积载货物6搬出外部。积载货物6例如为散装货物,可列举石炭作为一例。
[0040]
图2为说明卸载器装置100的构成的图。另外,图2中,以剖面显示岸壁2及船舶4。如图2所示,卸载器装置100构成为包含行进体102、回旋体104、悬臂106、顶构架108、升降机110、捞取部112、悬臂输送机114。
[0041]
行进体102由未图示的致动器驱动,可于轨道3上行进。行进体102设有位置感测器116。位置感测器116为例如旋转编码器。位置感测器116根据行进体102的车轮的旋转圈数而量测行进体102相对于既定的原点位置的水平面上的位置。
[0042]
回旋体104在行进体102的上部设置成以垂直轴为中心而回旋自如。回旋体104由未图示的致动器驱动而可相对于行进体102回旋。
[0043]
悬臂106在回旋体104的上部设置成可变更倾斜角度。悬臂106由未图示的致动器驱动而可变更以回旋体104为基准的倾斜角度。
[0044]
回旋体104设有回旋角度感测器118及倾斜角度感测器120。回旋角度感测器118及倾斜角度感测器120为例如旋转编码器。回旋角度感测器118量测回旋体104相对于行进体102的回旋角度。倾斜角度感测器120量测悬臂106相对于回旋体104的倾斜角度。
[0045]
顶构架108设在悬臂106的前端。顶构架108设有使升降机110回旋的致动器。
[0046]
升降机110形成为大致圆柱形状。升降机110以中心轴作为中心回旋自如地支撑在顶构架108。顶构架108设有回旋角度感测器122。回旋角度感测器122为例如旋转编码器。回旋角度感测器122量测升降机110相对于顶构架108的回旋角度。
[0047]
捞取部112设在升降机110的下端。捞取部112伴随着升降机110的回旋而与升降机110一体地回旋。如此,捞取部112通过作为垂直搬运机构部而发挥功能的顶构架108及升降机110保持成回旋自如。
[0048]
捞取部112设有多个桶112a及链条112b。多个桶112a连续地配置于链条112b。链条112b绕挂在捞取部112及升降机110的内部。
[0049]
捞取部112设有未图示的连杆机构。连杆机构为可动而可改变捞取部112的底部的长度。据此,捞取部112可改变与船舱5内的积载货物6相接的桶112a的数量。捞取部112使链条112b转动而利用底部的桶112a来捞取船舱5内的积载货物6。并且,捞取到积载货物6的桶112a伴随着链条112b的转动而朝升降机110的上部移动。
[0050]
悬臂输送机114设在悬臂106的下方。悬臂输送机114将通过桶112a而移动到升降机110的上部的积载货物6搬出外部。
[0051]
由此种构成所形成的卸载器装置100通过行进体102沿轨道3的延伸方向移动,以调整相对于船舶4的长边方向的位置关系。此外,卸载器装置100还通过回旋体104使悬臂
106、顶构架108、升降机110及捞取部112回旋,以调整相对于船舶4的短边方向的位置关系。此外,卸载器装置100还通过悬臂106使顶构架108、升降机110及捞取部112沿铅直方向移动,以调整相对于船舶4的铅直方向的位置关系。此外,卸载器装置100还通过顶构架108使升降机110及捞取部112回旋。据此,卸载器装置100可使捞取部112朝任意的位置及角度移动。
[0052]
在此,船舶4设有多个船舱5。船舱5在上部设有舱口缘围(hatch coaming)7。舱口缘围7在铅直方向具有既定高度的壁面。此外,与船舱5的中央附近的水平剖面相比,舱口缘围7的开口面积较小。也就是,船舱5通过舱口缘围7而呈开口缩窄的形状。另外,在舱口缘围7的上方设有开闭舱口缘围7的舱口盖8。
[0053]
卸载器装置100设有测距感测器130至136。测距感测器130至136为例如可测距的激光感测器,可适用velodyne公司制的vlp
‑
16、vlp
‑
32、及quanergy公司制的m8等。测距感测器130至136例如在圆柱形的本体部的侧面沿着轴方向设有分隔的十六个激光照射部。激光照射部可360度旋转地设于本体部。激光照射部分别配置为相邻配置的激光照射部的轴方向的激光发射角度的差为1至2.5度间隔而成为均等。也就是,测距感测器130至136能以360度的范围将激光朝本体部的周方向照射。此外,测距感测器130至136还能以与本体部的轴方向正交的平面为基准,在
±
15度的范围发射激光。此外,测距感测器130至136在本体部设有接收激光的接收部。
[0054]
测距感测器130至136使激光照射部旋转的同时朝向各个既定角度照射激光。测距感测器130至136从多个激光照射部照射(投影)而通过接收部分别接收物体(量测点)反射的激光。而且,测距感测器130至136根据照射激光起到接收为止的时间而导出到达物体的距离。也就是,测距感测器130至136通过一个激光照射部而分别量测一条量测线上到达多个量测点的距离。此外,测距感测器130至136通过多个激光照射部而分别量测多条量测线上的到达多个量测点的距离。
[0055]
图3及图4为说明测距感测器130至132的量测范围的图。图3为说明从上方观察卸载器装置100时的测距感测器130至132的量测范围的图。图4为说明从侧方观察卸载器装置100时的测距感测器130至132的量测范围的图。图3及图4中,以一点链线显示测距感测器130至132的量测范围。
[0056]
测距感测器130至132主要在检测舱口缘围7时使用。如图3及图4所示,测距感测器130至132安装于顶构架108的侧面。具体而言,测距感测器130至132以升降机110的中心轴为基准,于周方向相互分离120度而配置。此外,测距感测器130至132配置成本体部的中心轴沿着升降机110的径方向。另外,测距感测器130至132的铅直方向的上半部以未图示的盖体覆盖。
[0057]
因此,如图3及图4所示,测距感测器130至132就量测方向而言,可量测存在于水平面的更下方且存在于以与顶构架108的侧面相接的切线为基准的
±
15度的范围的物体之间的距离。
[0058]
图5及图6为说明测距感测器133至136的量测范围的图。图5为说明从上方观察捞取部112时的测距感测器133至136的量测范围的图。另外,图5中,卸载器装置100仅图示出捞取部112。此外,图5中,针对船舶4显示与捞取部112在铅直方向的相同位置的水平剖面。图6为说明从侧方观察卸载器装置100时的测距感测器133至136的量测范围的图。图5及图6
中,以一点链线显示测距感测器133、134的量测范围。此外,图5及图6中,以二点链线显示测距感测器135、136的量测范围。
[0059]
测距感测器133至136主要在检测船舱5内的积载货物6及船舱5的壁面(侧壁及底面)时使用。如图5及图6所示,测距感测器133安装于捞取部112的侧面112c。测距感测器133配置成本体部的中心轴与捞取部112的侧面112c正交。测距感测器134安装于捞取部112的侧面112d。测距感测器134配置成本体部的中心轴与捞取部112的侧面112d正交。测距感测器133、134的铅直方向的一部分以未图示的盖体覆盖。
[0060]
因此,测距感测器133、134就量测方向而言,可量测存在于捞取部112的侧面112c及侧面112d的上方侧的一部分及下方侧且存在于以与捞取部112的侧面112c及侧面112d平行的位置为基准的
±
15度的范围的物体之间的距离。另外,本实施方式的测距感测器133、134配置成于捞取部112的底部所位在的平面上至少可量测捞取部112的底部的最大长度以上的范围。
[0061]
测距感测器135安装于捞取部112的侧面112c。测距感测器135配置成本体部的中心轴与捞取部112的底面正交。测距感测器136安装于捞取部112的侧面112d。测距感测器136配置成本体部的中心轴与捞取部112的底面正交。
[0062]
因此,测距感测器135、136就量测方向而言,可量测存在于捞取部112的外侧且存在于以与捞取部112的侧面112c及侧面112d正交的水平面(或者,与本体部的中心轴正交的平面)为基准的
±
15度的范围的物体之间的距离。
[0063]
测距感测器130至136量测到与物体之间的距离时,就将表示到达物体的距离的量测资料传送至卸载器控制部140(参照图7)。
[0064]
图7为说明卸载器装置100的电性构成的图。如图7所示,卸载器装置100设有卸载器控制部140、记忆部142及显示部144。
[0065]
卸载器控制部140与位置感测器116、回旋角度感测器118、倾斜角度感测器120、回旋角度感测器122、测距感测器130至136、记忆部142及显示部144连接。卸载器控制部140以包含cpu(中央处理装置)的半导体集成电路所构成。卸载器控制部140从rom读出用以使cpu本身动作的程序、参数等。而且,卸载器控制部140与作为工作区的ram或其它电子电路协同动作,管理及控制卸载器装置100整体。
[0066]
此外,卸载器控制部140作为驱动控制部150、区域生成部152、边缘检测部154、量测资料取得部156、座标变换导出部158、资料储存部160、杂讯去除部162、形状导出部164而发挥功能。资料储存部160也作为上部资料储存部170及下部资料储存部172而发挥功能。形状导出部164也作为底面形状导出部180及侧壁形状导出部182而发挥功能。驱动控制部150控制卸载器装置100的驱动。另外,针对卸载器控制部140的其它功能部的详细内容于后叙述。
[0067]
记忆部142为硬盘、非挥发性内存等记忆媒体。记忆部142记忆卸载器装置100的三维模型的资料。卸载器装置100的三维模型的资料为显示升降机110及捞取部112的至少外形形状的立体像素(voxel)资料。此外,记忆部142还记忆通过形状导出部164导出的显示船舱5的三维形状的三维模型的资料,详细内容于后叙述。另外,三维模型的资料只要是可掌握卸载器装置100及船舱5的三维形状的资料即可,可为多边形(polygon)资料、轮廓(直线)或点群等,也可为并用所述的资料。此外,船舱5的三维模型的资料依各个船舶4将设在该船
舶4的船舱5的数量份记忆于记忆部142。
[0068]
显示部144为led显示器、有机el显示器等。显示部144显示对于船舱5的三维模型配置了卸载器装置100的三维模型而得的影像。
[0069]
图8为显示导出船舱5的三维形状的处理流程的流程图。另外,导出船舱5的三维形状的处理以对于初次通过卸载器装置100捞取积载货物6的船舱5进行为前提。因此,对于相同的船舱5,在第二次以后捞取积载货物6时,不进行导出船舱5的三维形状的处理。
[0070]
如图8所示,开始进行导出船舱5的三维形状的处理时,首先,区域生成部152进行区域作成处理(步骤s100),作成以舱口缘围座标系统320(参照图9、图10)为基准(以船舱5为基准)的作业区域400(参照图11)。作业区域为虚拟地在所生成的三维空间稠密地配置小区域群而形成。本实施方式中,使用立方体的小区域(立体像素)排列成立方格子状所形成的空间(所谓的立体像素空间)。
[0071]
图9及图10为说明卸载器装置100的座标系统的图。图9为从上方观察卸载器装置100的图。图10为从侧方观察卸载器装置100的图。在此,卸载器装置100具有三个座标系统,也就是,地上座标系统300、顶构架座标系统310及舱口缘围座标系统320。
[0072]
如图9及图10所示,地上座标系统300将预先设定的卸载器装置100的初期位置设为原点。地上座标系统300将与轨道3的延伸方向及铅直方向正交的方向设为xa轴方向。地上座标系统300将轨道3的延伸方向设为ya轴方向。地上座标系统300将铅直方向设为za轴方向。
[0073]
顶构架座标系统310将在升降机110的中心轴上且为铅直方向中的顶构架108的下端设为原点。顶构架座标系统310将悬臂106的下表面的延伸方向且为沿着悬臂106的方向设为xb轴方向。顶构架座标系统310将悬臂106的下表面的延伸方向且为与悬臂106正交的方向设为yb轴方向。顶构架座标系统310将升降机110的延伸方向设为zb轴方向。
[0074]
舱口缘围座标系统320将船舶4的舱口缘围7的船尾侧的壁面的中心位置且为舱口缘围7的上端设为原点(特定位置)。舱口缘围座标系统320将船舶4的长边方向,也就是沿着船舶4的舱口缘围7的延伸方向设为xc轴方向。舱口缘围座标系统320将船舶4的短边方向(宽度方向)设为yc轴方向。舱口缘围座标系统320将与舱口缘围7的上端面正交的向上方向设为zc轴方向。
[0075]
图11为说明通过多个小区域402所构成的作业区域400的图。另外,图11中,以一点链线图示出船舱5。如图11所示,区域生成部152在舱口缘围座标系统320中配置以原点o为基准而三维地展开的多个小区域(立体像素)402,据此生成作业区域400。作业区域400为多个小区域402沿xc轴方向、yc轴方向及zc轴方向排列而配置。更具体而言,区域生成部152沿xc轴方向及yc轴方向朝正方向及负方向双方配置小区域402,而沿zc轴方向仅朝负方向配置小区域402。小区域402为例如一边为0.2至1m的长方体。
[0076]
作业区域400整体大于船舱5即可,小区域402的数量及一边的长度可适当选择。此外,作业区域400也可为整体以zc轴方向为轴中心的圆筒形状,此时,小区域402的xy平面的剖面形成为扇型即可。
[0077]
另外,区域生成部152作成两个相同的作业区域400。此外,小区域402中,分别将表示量测点的数量的投票次数、xc轴方向中的量测点的座标的总和、yc轴方向中的量测点的座标的总和、zc轴方向中的量测点的座标的总和、到达测距感测器133或134为止的最小距
离、从量测点朝向测距感测器133或134的量测方向向量(比较方向)等统计资料赋予对应关系而予以记忆,详细内容于后叙述。另外,作为统计资料而记载于此的项目为一例,例如也可储存分散值等其它项目。
[0078]
回到图8,边缘检测部154将记忆于记忆部142的舱口缘围7的三维模型信息从记忆部142读出(步骤s102)。另外,舱口缘围7的三维模型信息为通过舱口缘围座标系统320表示的舱口缘围7的三维模型。舱口缘围7的三维模型信息也可在初次将捞取部112投入船舱5内时,使用通过测距感测器130至132量测到的量测点的量测资料而作成。此外,舱口缘围7的三维模型信息也可使用通过其它量测器量测到的量测资料而作成。此外,舱口缘围7的三维模型信息也可根据舱口缘围7的图面而作成。无论是哪一种,舱口缘围7的三维模型信息在步骤s102的处理进行之前作成并记忆于记忆部142即可。
[0079]
接下来,量测资料取得部156随时取得通过测距感测器130至136量测到的量测点的量测资料(步骤s104)。另外,量测资料取得部156从捞取部112开始船舱5内的积载货物6的捞取作业起到所有的积载货物6捞取结束为止的期间(例如10小时),以1秒一至五次的频率,从各测距感测器130至136定期地取得量测资料。
[0080]
而且,在每次通过量测资料取得部156从测距感测器130至136取得量测资料时,座标变换导出部158进行座标变换处理(步骤s106),导出用以将顶构架座标系统310变换为舱口缘围座标系统320的变换参数。
[0081]
在此,地上座标系统300、顶构架座标系统310可根据卸载器装置100的形状及卸载器装置100的移动而进行变换。
[0082]
例如,由于测距感测器133至136安装于捞取部112,因此,可得知测距感测器133至136相对于捞取部112的位置。而且,可根据升降机110的回旋角度来导出顶构架座标系统310的位置。
[0083]
此外,由于测距感测器130至132安装于顶构架108,因此,可得知测距感测器130至132在顶构架座标系统310的位置。
[0084]
在此,顶构架座标系统310与舱口缘围座标系统320随着卸载器装置100及船舶4的移动而使得相对的位置关系产生变化。例如,会由于船舶4摇晃、潮水的涨潮退潮、积载货物6的积载量等使船舶4沿铅直方向移动,而使顶构架座标系统310与舱口缘围座标系统320的相对的位置关系产生变化。
[0085]
对此,边缘检测部154根据通过测距感测器130至132测定的量测点的量测资料,检测舱口缘围7的上端的边缘。而且,座标变换导出部158根据所检测到的舱口缘围7的上端的边缘,导出用以将顶构架座标系统310变换为舱口缘围座标系统320的变换参数。也就是,在此导出作业区域400中成为基准点的舱口缘围7与测距感测器133或134的位置关系。而且,其位置关系使用于以测距感测器133、134量测的量测点反映出对于作业区域400内的小区域402。
[0086]
首先,边缘检测部154根据测距感测器130至132的位置以及到达通过测距感测器130至132所量测到的量测点的距离,导出顶构架座标系统310中的量测点的三维位置。
[0087]
图12为说明测距感测器130至132的量测点的图。另外,图12中,以粗线表示舱口缘围7上的测距感测器130至132的量测范围。如图12所示,测距感测器130至132量测存在于水平面的更下方且存在于以与顶构架108相接的平面为基准的从测距感测器130至132起
±
15
度的范围的物体之间的距离。
[0088]
因此,测距感测器130至132以测距感测器130至132的铅直下方(升降机110的旋转中心)为基准,将前方侧与后方侧的不同的舱口缘围7的边缘作为量测范围。另外,前方侧指一次的量测中(时间序列的)前半部量测到的量测范围。此外,后方侧指一次的量测中(时间序列的)后半部量测到的量测范围。
[0089]
对此,以测距感测器130至132的铅直下方为基准,将通过测距感测器130至132量测到的测定点分割为前方侧及后方侧两者。
[0090]
图13为显示检测边缘点的情形的图。另外,图13中,以黑圆点表示量测点。图13中,图示出通过测距感测器130至132的一个激光照射部所照射的激光而量测到的量测点。
[0091]
边缘检测部154分别依通过一个激光照射部照射而量测到的一条量测线的量测点群(分别依前方侧、后方侧),进行以下的处理。边缘检测部154导出通过一个激光照射部照射而量测到的各量测点的向量(方向)。在此,量测点的向量在连续地量测的量测点之中,将对于一个量测点的接下来量测的量测点的方向(向量)导出作为一个量测点的向量。
[0092]
而且,边缘检测部154抽出量测点的向量为铅直方向的量测点。由于通过测距感测器130至132量测的舱口缘围7的壁面(侧面)大致沿铅直方向延伸,因此,舱口缘围7的壁面有量测点时,量测点的向量会成为铅直方向。
[0093]
而且,边缘检测部154在所抽出的量测点之中连续地抽出的量测点有多个时,抽出铅直方向中的最上方的点。这是因为为了检测舱口缘围7的上端的边缘,连续地量测到的量测点群中,最上方的点有可能为舱口缘围7的上端的边缘之故。
[0094]
接下来,边缘检测部154从所抽出的量测点之中,抽出顶构架座标系统310的xb轴方向及yb轴方向中的最接近于原点的量测点。也就是,边缘检测部154抽出最接近于升降机110的中心轴的量测点。这是因为舱口缘围7在船舶4的各结构物之中位于最接近于升降机110的位置之故。
[0095]
而且,边缘检测部154对于所抽出的量测点再抽出存在于顶构架座标系统310的xb轴方向及yb轴方向的既定范围(例如数十cm范围)的量测点。在此抽出舱口缘围7上的量测点。
[0096]
而且,边缘检测部154从再抽出的量测点,也就是舱口缘围7上的量测点之中,抽出铅直方向中的最上方的量测点,作为舱口缘围7的边缘点。
[0097]
边缘检测部154分别依通过测距感测器130至132的一个激光照射部照射而量测到的量测点群,抽出前方侧及后方侧的边缘点。
[0098]
而且,当所有的边缘点都被抽出时,边缘检测部154检测舱口缘围7的边缘的直线。具体而言,边缘检测部154将在测距感测器130的前方侧分别抽出的边缘点作为一个群组。同样地,边缘检测部154将在测距感测器130的后方侧分别抽出的边缘点作为一个群组。并且,边缘检测部154将在测距感测器131、132的前方侧及后方侧分别抽出的边缘点分别作为群组。
[0099]
在此,如图12所示,在测距感测器130至132的前方侧及后方侧分别量测的舱口缘围7的上端的边缘的直线包含舱口缘围7的转角时,则成为量测二条直线。
[0100]
对此,边缘检测部154是依各个群组,将所抽出的边缘点间的线段之中具有最多类似线段的那个导出作为候补向量。而且,边缘检测部154对于候补向量抽出存在于预先设定
的范围以内的边缘点。而且,边缘检测部154使用所抽出的边缘点而再次计算直线。
[0101]
接着,边缘检测部154使用未被抽出的边缘点反复进行上述处理。但是,所抽出的边缘点的数量未达预先设定的临限值时,则不导出直线。据此,即使包含舱口缘围7的转角时,也可导出两条边缘的直线。
[0102]
边缘检测部154依各个群组反复进行上述处理,据此导出边缘的直线。
[0103]
如此,边缘的直线在一处最多检测出二条,因此最多检测出十二条。
[0104]
而且,边缘检测部154从所检测到的直线之中,导出各直线间的夹角。而且,边缘检测部154于夹角在预先决定的临限值以下时,统合为相同的直线。具体而言,使用构成夹角在预先决定的临限值以下的直线的边缘点,通过最小平方近似来再次导出直线。
[0105]
接下来,边缘检测部154从所检测到的边缘的直线导出边缘边信息,此边缘边信息包含:各边的三维方向向量、各边的三维重心座标、各边的长度、及各边的端点的座标。如此,通过使用设在船舶4的上方的测距感测器130至132导出设在船舱5的上部的舱口缘围7的边缘边信息,即可容易且精确度良好地导出船舱5的位置(姿势)。
[0106]
接着,座标变换导出部158根据在步骤s102所读入的三维模型信息、及以顶构架座标系统310表现的边缘边信息(检测结果),进行座标变换处理(图8的s106),导出顶构架座标系统310与舱口缘围座标系统320的变换参数。
[0107]
座标变换导出部158使所检测到的舱口缘围7的边缘的直线的方向旋转达悬臂106的回旋角度以进行粗略的补正。此外,座标变换导出部158将所检测到的舱口缘围7的边缘的直线与三维形状信息中的舱口缘围7的上端的边之中,将边缘的方向最接近的直线彼此赋予对应关系。据此,形成正确的赋予对应关系,因此可获得稳定且接近于正确解答的解答的变换参数。另外,赋予对应关系时,也可将所检测到的舱口缘围7的边缘的直线以三维点群表示,并将其三维点群与三维模型信息中的舱口缘围7的上端的边的最短距离的平均值接近者彼此赋予对应关系。此外,也可考量边缘的方向及最短距离的平均值双方而赋予对应关系。
[0108]
而且,座标变换导出部158例如通过lm法来求取属于变换参数的绕着xb轴、yb轴、zb轴的旋转角度α、β、γ以及进行向量t=(tx,ty,tz)。lm法中,例如以构成边缘的直线的边缘点与根据三维形状信息的舱口缘围7的上端的边之间的距离的差的平方和作为评估函数,并求取使其评估函数成为最小的变换参数。具体而言,以使构成边缘的直线的边缘点与根据三维形状信息的舱口缘围7的上端的边之间的距离的合计成为最小的方式,或是以使由边缘的直线与根据三维形状信息的舱口缘围7的上端的边所形成的曲面的面积成为最小的方式,求取变换参数。另外,求取变换参数的手法不限于lm法,也可为最陡下降法、牛顿法等其它手法。
[0109]
如此,座标变换导出部158导出用以将顶构架座标系统310变换为舱口缘围座标系统320的变换参数。
[0110]
据此,卸载器装置100可利用舱口缘围座标系统320来表现通过设于捞取部112的测距感测器133至136量测到的量测点的三维位置。因此,测距感测器133至136也可说是量测与船舱5的量测点中的舱口缘围座标系统320的三维位置(位置信息)相关的量测资料。此外,通过以舱口缘围座标系统320来表现,可减低对于卸载器装置100的船舶4的摇晃、位置的变化的影响。
[0111]
资料储存部160根据通过测距感测器133及134量测到的量测点的三维位置,对于作业区域400中形成的小区域402储存量测点的统计资料(图8的步骤s108、s110)。
[0112]
图14为说明将测距感测器133量测的量测点分割为上部及下部的情形的图。另外,图14中,以一点链线显示测距感测器133的量测范围。如上述,测距感测器133的铅直方向的一部分以未图示的盖体覆盖。因此,如图14所示,测距感测器133以与升降机110的延伸方向正交的平面s1为基准,可量测相对地存在于上部(升降机110侧)与相对地存在于下部(捞取部112的底面侧)的物体(量测点)的距离。同样地,测距感测器134以与升降机110的延伸方向正交的平面s1为基准,可量测存在于上部与下部的物体(量测点)的距离。另外,区分上部及下部的基准能够以积载货物6的表面不进入量测范围的高度来设定。
[0113]
而且,在捞取部112插入到船舱5内的状态时,测距感测器133及134主要通过上部的量测点量测到达船舱5的侧壁、船舱5内的结构物(将这些部位统称为船舱5的侧部)的距离,且通过下部的量测点量测到达船舱5的底面、船舱5的侧壁、船舱5内的结构物、及积载货物6(将这些部位统称为船舱5的底部)的距离。
[0114]
对此,资料储存部160将通过测距感测器133及134量测到的量测点的量测资料区分为上部的量测点的量测资料与下部的量测点的量测资料,对于不同的作业区域400中形成的小区域402储存统计资料。
[0115]
上部资料储存部170导出通过测距感测器133及134量测到的量测点之中,被分类到上部的量测点的顶构架座标系统310的三维位置。此外,上部资料储存部170使用变换参数,将顶构架座标系统310的三维位置变换为舱口缘围座标系统320的三维位置。
[0116]
而且,上部资料储存部170进行上部量测资料储存处理(图8的步骤s108),使用上部用的作业区域400,对于与舱口缘围座标系统320中的量测点的三维位置对应的小区域402储存统计资料。具体而言,上部资料储存部170在接受一点的量测资料时,将对应的小区域402的投票次数(量测点的数量)加算1。此外,上部资料储存部170将量测点的xc轴方向的位置(座标)加算到xc轴方向的座标的总和。此外,上部资料储存部170将量测点的yc轴方向的位置(座标)加算到yc轴方向的座标的总和。此外,上部资料储存部170将量测点的zc轴方向的位置(座标)加算到zc轴方向的总和。由于一次的量测中进行多点的量测,因此,也会有一次的量测中对小区域402进行多次的加算的情形。在此,以投票次数除以xc轴方向的座标的总和,可导出小区域402所包含的量测点的xc轴方向的重心位置。因此,通过储存投票次数、xc轴方向的座标的总和、yc轴方向的座标的总和、量测点的zc轴方向的位置(座标),可导出小区域402的三维的重心位置。
[0117]
此外,上部资料储存部170还导出量测点与量测到该量测点时的测距感测器133或134的位置之间的距离。另外,测距感测器133或134的顶构架座标系统310的三维位置使用变换参数变换为舱口缘围座标系统320。另外,在此,也可不变换为舱口缘围座标系统320而导出量测点与量测到该量测点时的测距感测器133或134的位置之间的距离。
[0118]
而且,上部资料储存部170将所导出的距离与针对该小区域402所记录的最小距离进行比较,所导出的距离为较小的值时,将最小距离更新为所导出的距离。也就是,小区域402内所包含的量测点之中,将到达测距感测器133或134的距离为最接近的量测点与量测到该量测点时的测距感测器133或134的位置之间的距离,记录作为最小距离。
[0119]
此外,上部资料储存部170在最小距离被更新时,就导出从其量测点朝向测距感测
器133或134的向量,并将所导出的向量更新为量测方向向量。在此,将成为最小距离的量测点与测定到该量测点时的测距感测器133或134的位置的向量,记录作为量测方向向量。
[0120]
上部资料储存部170在每次通过测距感测器133或134取得量测资料时,针对属于上部的所有的量测点,对于对应的小区域402储存统计资料。
[0121]
同样地,下部资料储存部172导出通过测距感测器133及134量测到的量测点之中,被分类到下部的量测点的顶构架座标系统310的三维位置。此外,下部资料储存部172使用变换参数,将顶构架座标系统310的三维位置变换为舱口缘围座标系统320的三维位置。
[0122]
而且,下部资料储存部172进行下部量测资料储存处理(图8的步骤s110),使用下部用的作业区域400,对于与舱口缘围座标系统320中的量测点的三维位置对应的小区域402储存统计资料。具体而言,下部资料储存部172将对应的小区域402的投票次数(量测点的数量)加算1。此外,下部资料储存部172将量测点的xc轴方向的位置(座标)加算到xc轴方向的座标的总和。此外,下部资料储存部172将量测点的yc轴方向的位置(座标)加算到yc轴方向的座标的总和。此外,下部资料储存部172将量测点的zc轴方向的位置(座标)加算到zc轴方向的总和。
[0123]
此外,下部资料储存部172还导出量测点与量测到该量测点时的测距感测器133或134的位置之间的距离。而且,下部资料储存部172将所导出的距离与针对该小区域402所储存的最小距离进行比较,所导出的距离为较小的值时,将最小距离更新为所导出的距离。另外,在此,也可不变换为舱口缘围座标系统320而导出量测点与量测到该量测点时的测距感测器133或134的位置之间的距离。
[0124]
此外,下部资料储存部172在最小距离被更新时,就导出从其量测点朝向测距感测器133或134的向量,并将所导出的向量更新为量测方向向量。
[0125]
下部资料储存部172在通过卸载器装置100进行船舱5内的积载货物6的捞取作业即将结束之前的数十分至数小时的期间,在每次取得通过测距感测器133或134量测到的量测资料时,针对属于下部的所有的量测点,对于对应的小区域402储存统计资料。如此,可针对在积载货物6的捞取作业即将结束之前的数分钟的期间取得的下部的量测点,对于下部的作业区域400储存统计资料。据此,可记录船舱5内几乎未残留积载货物6的时间点的统计资料。因此,在以下说明的导出船舱5的底面的形状时,可尽可能地排除与积载货物6对应的量测点,而精确度良好地导出船舱5的底面的形状。据此,在第二次以后通过卸载器装置100将相同的船舱5内的积载货物6进行卸货时,作业者即可通过使用所导出的船舱5的底面的形状,而容易地掌握船舱5的底面的形状。
[0126]
资料储存部160判定所有的量测是否已结束(步骤s112)。在此,例如,通过是否已确认到捞取部112可从船舱5移除的程度的上升而进行。但是,也可通过作业者进行既定的操作来判定所有的量测是否已结束。
[0127]
而且,在判定为所有的量测已结束时(步骤s112的是),就转移到步骤s114的处理。另一方面,在非判定为所有的量测已结束时(步骤s112的否),就转移到步骤s104的处理,并反复进行步骤s104至步骤s110的处理,直到所有的量测结束。
[0128]
在判定为所有的量测已结束时(步骤s112的是),杂讯去除部162进行杂讯去除处理(步骤s114),对于被视为杂讯的小区域402建立不采用旗标,该不采用旗标表示不抽出作为船舱5的形状。在此,杂讯去除部162进行两个杂讯去除处理。
[0129]
第一个杂讯去除处理中,杂讯去除部162针对zc轴方向的高度相同(相同的xcyc平面)的小区域402,对于投票频率低(量测点少)的小区域402建立不采用旗标。具体而言,杂讯去除部162累计zc轴方向相同的小区域402的所有的投票次数。而且,杂讯去除部162对于zc轴方向相同的小区域402的投票次数未达所累计的值的0.01%的小区域402建立不采用旗标。据此,可抑制投票次数极端少的小区域402被采用作为船舱5的形状。
[0130]
第二个杂讯去除处理中,杂讯去除部162针对与一个小区域402邻接的二十六个小区域402(3
×3×
3=27个立方体(cube)中的中央的小区域402以外的小区域402),在投票次数为0次时,对于此一个小区域402建立不采用旗标。这是由于在雨水、尘埃等浮游物作为量测点而被量测到时,抑制该小区域402被采用作为船舱5的形状。
[0131]
当通过杂讯去除部162进行杂讯去除处理时,形状导出部164导出船舱5的三维形状(图8的步骤s116、s118)。底面形状导出部180主要使用下部用的作业区域400(未达对底面位置加算既定的临限值所得的高度的小区域402),来进行导出船舱5的底面的三维形状的底面形状导出处理(图8的s116)。侧壁形状导出部182主要使用上部用的作业区域400(包含对下部用的作业区域400中的底面位置加算既定的临限值所得的高度以上的小区域402),来进行导出船舱5的侧壁的三维形状的侧壁形状导出处理(图8的s118)。
[0132]
图15为说明底面形状导出处理的图。另外,图15中,以黑圆点表示量测点,以粗线表示所抽出的小区域402。如图15所示,底面形状导出部180在下部用的作业区域400中,从未建立有不采用旗标的小区域402之中,抽出沿zc轴方向(上下方向)排列的小区域402之中的zc轴的值最小的小区域402。另外,小区域402中,统计资料连一次都未被储存时,也就是,连一个量测点都未具有时,对于其小区域402建立不采用旗标,即不会在此被抽出。
[0133]
上述的下部量测资料储存处理中,也针对在船舱5内残留有积载货物6的状态的量测点,储存各小区域402的统计资料。此种情形,对于积载货物6的量测点,也储存统计资料。另一方面,积载货物6减少以致船舱5的底面露出时,则储存对于船舱5的底面的量测点相关的统计资料。因此,可利用船舱5的底面比积载货物6更位于zc轴方向的下方处的情形,而从沿zc轴方向排列的小区域402之中,抽出zc轴的值最小的小区域402,据此抽出与船舱5的底面对应的小区域402。
[0134]
而且,底面形状导出部180将所抽出的小区域402的zc轴方向的重心位置设为代表高度。底面形状导出部180抽出xcyc平面上的所有的位置的小区域402并且导出代表高度。而且,底面形状导出部180沿zc轴方向以既定间隔(例如,0.2至1m)来区隔范围,且依所区隔的每个范围导出包含代表高度的小区域402的数量。另外,zc轴方向的间隔与xcyc方向的间隔也可不同。
[0135]
接下来,底面形状导出部180将包含代表高度的小区域402的数量最多的范围以及最多数量的50%以上的数量被导出的范围中所包含的小区域402的代表高度的平均,导出作为船舱5的底面的高度。在此,船舱5的底面在zc轴方向并非恒常固定,也会有倾斜、一部分突出或凹陷等的情形。对此,包含代表高度的小区域402的数量最多的范围可能为底面的高度,但还可通过也抽出导出其数量的50%以上的数量的范围,而导出船舱5平均的底面的高度。
[0136]
接下来,底面形状导出部180对于xcyc平面上相同的每个小区域402,抽出位在船舱5的底面的高度的小区域402以及zc轴方向邻接于其小区域402的小区域402的统计资料。
而且,底面形状导出部180针对所抽出的统计资料依每个项目加算,将三个小区域402的重心位置导出作为底面位置。在此,因考量到会有船舱5的底面跨越多个小区域402的可能性,故也针对zc轴方向邻接的小区域402进行抽出。据此,可更精确度良好地导出底面位置。
[0137]
底面形状导出部180针对xcyc平面上所有的小区域402同样地导出底面位置。据此,底面形状导出部180通过多个底面位置(重心位置)的点群而导出船舱5的底面的形状(底部的形状)。
[0138]
图16为说明导出与侧壁对应的小区域402的情形的图。侧壁形状导出部182在上部用的作业区域400的小区域402以及对下部用的作业区域400中的底面位置加算既定的临限值所得的高度以上的小区域402之中,从未建立有不采用旗标的小区域402之中,抽出对于通过底面形状导出部180导出的底面的高度加算既定的值所得的zc轴方向的位置以上的小区域402。
[0139]
而且,如图16所示,侧壁形状导出部182抽出任意的一个小区域402(图中,中央的小区域402)的xcyc平面上的周围八个小区域402。而且,侧壁形状导出部182从八个小区域402之中,抽出与一个小区域402的量测方向向量对应的小区域402(图中,粗线的小区域402),作为比较对象小区域。具体而言,侧壁形状导出部182从一个小区域402到八个小区域402各者的向量之中,抽出与量测方向向量最接近(角度差最小)的向量对应的小区域402,作为比较对象小区域。然后,侧壁形状导出部182比较一个小区域402的投票次数与比较对象区域的投票次数。此外,依据比较的结果,侧壁形状导出部182对于投票次数少的小区域402建立不采用旗标。
[0140]
侧壁形状导出部182对于所有的小区域402同样地执行比较对象区域的抽出、投票次数的比较、以及建立不采用旗标的处理。
[0141]
而且,侧壁形状导出部182导出未建立有不采用旗标,也就是被判定为投票次数多的小区域402的重心位置,作为侧壁位置。换言之,侧壁形状导出部182比较沿量测方向向量排列的小区域402间的统计资料,而具体指定出与侧壁(表面)对应(相当)的小区域402。据此,侧壁形状导出部182通过多个侧壁位置(重心位置)的点群,导出船舱5的侧壁的形状(侧部的形状)。
[0142]
在此,量测方向向量显示量测到与测距感测器133或134的距离最小的量测点时的方向。因此,量测方向向量可说是显示船舱5的中心方向。而且,因量测误差,会有量测点的数量不同的多个小区域402沿着量测方向向量的方向排列的情形。
[0143]
对此,侧壁形状导出部182可通过比较一个小区域402与对应于量测方向的比较对象小区域的投票次数,仅保留最可能为船舱5的位置的小区域402(不建立不采用旗标)。据此,侧壁形状导出部182可精确度良好地导出船舱5的侧壁的形状。此外,卸载器装置100还可导出被积载货物6遮蔽(无法目视/量测)的壁面、结构物的形状。
[0144]
形状导出部164在导出船舱5的多个底面位置(重心位置)的点群以及多个侧壁位置(重心位置)的点群时,根据这些多个底面位置(重心位置)的点群以及多个侧壁位置(重心位置)的点群,生成船舱5的三维模型,并记忆于记忆部142。另外,三维模型的生成方法,例如可通过配置分别以底面位置及侧壁位置为中心的立体像素而生成三维模型,也可通过导出相互连结邻接的底面位置及侧壁位置的曲面而生成三维模型等,其方法为何并无特别限制。
[0145]
如以上所述,卸载器装置100生成以船舱5为基准的作业区域400,并对于作业区域400的小区域402储存量测点的统计资料。据此,即使测距感测器133、134相对于船舱5移动时,卸载器装置100也可恒常地以船舱5为基准而储存统计资料。如此,卸载器装置100可提高统计资料的储存精确度,而可精确度良好地导出船舱5的三维形状。
[0146]
此外,卸载器装置100在对于相同的船舱5进行积载货物6的捞取时,将船舱5的三维模型显示于显示部144。据此,卸载器装置100中,可使作业者容易地掌握船舱5的形状。
[0147]
此外,卸载器装置100将通过测距感测器133、134量测到的量测点区分为上部与下部来储存统计资料。此外,卸载器装置100使用上部的统计资料而导出沿垂直方向延伸的船舱5的侧壁的形状,并使用下部的统计资料而导出沿水平方向延伸的船舱5的底面的形状。据此,卸载器装置100可精确度良好地分别导出船舱5的侧壁及底面的形状。
[0148]
在此,卸货装置将积载于船舱内的积载货物搬出船舱外。就卸货装置的一例而言,可举例卸载器装置。卸载器装置常有操纵者难以或不可能直接目视积载货物的状态、到达船舱的壁面的距离等情况。卸载器装置,已开发了一种在捞取部安装感测器来量测到达船舱的壁部的距离的技术(例如,日本特开平8
‑
012094号公报)。
[0149]
然而,船舱具有垂直面、倾斜面等各式各样形状的壁面。此外,船舱内还有补强板、螺旋阶梯等结构物。如此,船舱呈现复杂的形状。如上述记载的技术中,作业者难以掌握船舱内的复杂形状。
[0150]
对此,卸载器装置100具备:区域生成部152,以船舶的特定位置为基准而生成作业区域400,该作业区域400由三维展开的多个小区域所构成;量测资料取得部156,随时取得通过测距感测器133、134量测到的船舱的量测点的量测资料;资料储存部160,根据量测点的量测资料,针对包含量测点的小区域402,储存量测点的统计资料;及形状导出部164,根据统计资料而导出船舱5的形状。据此,卸载器装置100可容易地掌握船舱5的形状。
[0151]
以上,已参照所附附图针对实施方式进行了说明,但本发明当然不限定于此实施方式。所属技术领域的技术人员当可从申请专利范围所记载的范畴思及各种变更例或修正例,这些变更例或修正例当然理解为也属于本技术的技术范围。
[0152]
例如,上述实施方式中,通过边缘检测部154进行的边缘的检测方法仅为一例。边缘检测部154也可通过其它方法来抽出舱口缘围7的边缘。
[0153]
此外,上述实施方式中,使测距感测器133、134伴随着卸载器装置100的移动而移动,但也可变更测距感测器133、134的指向等。据此,可使测距感测器133、134的量测范围变广而尽快导出船舱5的形状。
[0154]
此外,上述实施方式中,在导出侧壁的形状时比较投票次数。然而,资料储存部160也可将量测时期储存(更新)作为储存资料。而且,形状导出部164也可对于包含较早的时期量测到的量测点的小区域402,建立不采用旗标,而保留较晚的时期量测到的量测点。据此,例如,在积载货物6被捞取等而致环境产生变化时,可通过采用最新量测到的量测点而精确度良好地导出物体的形状。
[0155]
此外,上述实施方式中,在导出侧壁的形状时,比较一个小区域402与邻接的小区域402的投票次数。然而,也可比较一个小区域402与配置在一个小区域402附近的小区域之中的与量测方向向量对应的多个小区域402的投票次数。此时,也可仅保留投票次数最多的小区域402,而对于其它的小区域402建立不采用旗标。此外,也可保留投票次数最多的小区
域402以及具有最多投票次数的既定比例(例如50%)以上的投票次数的小区域402。据此,例如,在船舱5的侧壁的周遭有别的结构物时,可保留与其结构物对应的小区域402(导出结构物的形状)。
[0156]
此外,上述实施方式中,比较一个小区域402与对应于量测方向向量(比较方向)的小区域402的投票次数。然而,不限于量测方向向量,也可适当变更为是否针对朝任一方向排列的小区域402进行比较。例如,也可采用下列方法:统计地求取从小区域402的量测点的分布中的最重心起平方距离和为最小的方向,也就是分布的第三主成分的方向,作为比较方向,据此比较朝其方向排列的小区域402。
[0157]
此外,上述实施方式中,每次进行座标变换处理。然而,也可使用slam法,取得过去量测到的量测点与本次量测到的量测点的配对,据此推定量测点的舱口缘围座标系统320的三维位置。
[0158]
此外,上述实施方式中,区域生成部152以船舱5为基准而生成作业区域400。然而,区域生成部152也能够以船舶4的任意特定位置为基准而生成作业区域400。例如,区域生成部152也能够以包含舱口缘围7及舱口盖8的开口部的特定位置为基准而生成作业区域400。据此,即使是相同的船舶4,船舱5附近的结构也会在船首侧、中央附近、船尾侧有所不同,故可配合结构而生成作业区域400。
[0159]
此外,上述实施方式中,就形状导出装置的一例而言,举卸载器装置100为例来进行说明。然而,形状导出装置不限于卸载器装置。形状导出装置可适用导出物体的形状的各式各样的装置。
[0160]
此外,上述实施方式中,就卸货装置的一例而言,举卸载器装置100为例来进行说明。然而,卸货装置也可为连续卸载器(吊桶式、带式、垂直螺旋输送机式等)、气动式卸载器等。
[0161]
[产业上的可利用]
[0162]
本发明可利用于形状导出装置及卸货装置。
[0163]
附图标记说明
[0164]
100
ꢀꢀꢀꢀꢀꢀꢀꢀ
卸载器装置(形状导出装置、卸货装置)
[0165]
133
ꢀꢀꢀꢀꢀꢀꢀꢀ
测距感测器
[0166]
134
ꢀꢀꢀꢀꢀꢀꢀꢀ
测距感测器
[0167]
152
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
区域生成部
[0168]
156
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
量测资料取得部
[0169]
160
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
资料储存部
[0170]
164
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
形状导出部。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
