1.本发明属于机电控制技术领域,具体是涉及一种绳系支撑飞行器模型强迫自由角运动模拟与抑制方法。
背景技术:
2.绳系支撑系统使用绳索代替传统的刚性杆来控制末端执行器的姿态,具有工作空间大、负载能力高、动态性能好等优点,在大型射电望远镜、康复机器人等方面已有较为成熟的应用,同时也为风洞试验提供一种新型支撑方式。传统的风洞试验采用“硬式”支撑,如腹撑、背撑、尾撑等,其惯性力较大,支架也会对模型附近的流场产生较大干扰;而绳系支撑因其对流场干扰较小,且具有多自由度运动的特点,可以为风洞动态试验支撑技术提供支持。
3.根据绳数m与自由度n之间的关系,绳系支撑系统可分为三种类型,即:欠约束(m<n 1)、完全约束(m=n 1)和冗余约束(m>n 1)。近年来,已有研究将冗余约束和完全约束的两类绳系支撑系统应用于低速风洞试验中,开展相应的理论研究和试验验证。然而,此机构只能驱动飞行器模型做受迫运动,研究给定运动轨迹下的气动特性。为研究大迎角气动/运动/控制耦合关系或全模颤振试验,需要进行更接近真实的飞行情况的试验,模拟飞行器在特定方向上的强迫自由角运动。
4.目前,国内外多采用轴承结合“硬式”支撑的方式模拟飞行器在特定方向上的强迫自由角运动。如专利cn200910073391.9强迫俯仰
‑
自由偏航风洞试验装置中,飞行器模型腹撑支杆由轴承支撑,能够实现大迎角强迫俯仰 自由偏航运动,但是腹撑对飞行器模型附近的流场产生较大的干扰;专利cn110207943a高超声速风洞虚拟飞行试验系统及试验方法中,在飞行器模型内布置尾撑式串联三自由度轴承,能够实现俯仰、滚转、偏航自由角运动,但无法直接模拟强迫运动,而且支撑杆的存在也会一定程度限制飞行器模型的角运动范围。综上所述,还未见到有关强迫俯仰和同时自由滚转、偏航的运动模拟,因此,需要设计一种新的大迎角强迫自由运动模拟与抑制方法。
技术实现要素:
5.本发明的目的是提供可对飞行器模型进行风洞大迎角强迫自由角运动试验,研究其大迎角下的气动/运动/控制耦合关系的一种绳系支撑飞行器模型强迫自由角运动模拟与抑制方法。
6.本发明包括以下步骤:
7.1)采用一种5绳欠约束绳系支撑系统支撑飞行器模型的方式;
8.2)建立含舵面的支撑系统动力学方程;
9.3)设计大迎角强迫俯仰运动控制律;
10.4)设计舵面控制律1,补偿滚转和偏航方向的绳拉力约束项和科氏力项,模拟强迫俯仰 自由滚转/偏航角运动;
11.5)设计舵面控制律2,抑制滚转/偏航方向的角运动。
12.在步骤1)中,所述5绳欠约束绳系支撑系统包括4根上方绳索和1根下方绳索;4根上方绳索对称布置在飞行器模型的两侧前后,1根下方绳索布置在通过飞行器模型质心的位置;基于刚度和固有频率分析,支撑系统在滚转、偏航方向的一阶固有频率尽可能低,通过质心的绳索使滚转偏航基频尽可能低;绳索均为张紧状态,不发生虚牵,即绳拉力t>0;由于欠约束绳系支撑的不完全约束,即使在绳长给定不变的情况下,飞行器模型依然可以运动,因此选择5绳欠约束绳系支撑系统作为模拟飞行器强迫自由角运动的支撑方式。
13.在步骤2)中,所述含舵面的支撑系统动力学方程采用如下表达式:
[0014][0015]
其中,m(x)为飞行器模型的惯性矩阵,x为飞行器模型位姿矢量,为速度项,为加速度项;为非线性哥氏离心力矩阵,w
g
为重力矢量,为与飞行器模型的位姿及其变化率有关的气动力/力矩向量,w
e2
(δ
r
,δ
a
)为与飞行器模型的方向舵偏转角和副翼偏转角有关的气动力/力矩向量,δ
r
为飞行器模型的方向舵偏转角,δ
a
为飞行器模型的副翼偏转角,为方向舵偏航力矩系数,为副翼滚转力矩系数,t为绳拉力矢量,j为系统的雅可比矩阵;表示一阶导数,表示二阶导数,()
t
表示矩阵的转置。
[0016]
在步骤3)中,所述大迎角强迫俯仰运动控制律可在设置舵面偏角为零的条件下设计,考虑补偿系统内部建模的不确定性和实际试验中存在的外界干扰,设计大迎角强迫俯仰运动控制律;具体包括:小波神经网络、扩张状态观测器和非奇异终端滑模控制器;其中,小波神经网络用于补偿系统内部建模的不确定性,扩张状态观测器用于补偿实际试验中存在的外界干扰,非奇异终端滑模控制器用于使被控对象的跟踪误差收敛;大迎角强迫俯仰运动的总控制律为:
[0017][0018]
其中,t为绳拉力,c为等效雅可比矩阵,a0为等效惯性矩阵,b0为等效阻尼矩阵,d0为等效科氏力与重力矩阵,为干扰项估计值,为最大神经网络估计权值;为非奇异终端滑模面函数,β>0,1<γ<2,e=x
‑
x
d
为误差,x为实际位姿,x
d
为理论位姿,||表示绝对值,sign()表示符号函数;w为小波基函数矩阵;d1、d2为半正定增益矩阵,仅在俯仰方向设置增益值;u0是控制律中的鲁棒项;()
表示矩阵的伪逆;表示矩阵相乘,运算如下:其中,w
i
是矩阵w的第i个列向量。
[0019]
在步骤4)中,所述舵面控制律1的表达式如下:
[0020][0021]
其中,()
i
代表列向量的第i个分量。该控制律可以补偿滚转和偏航方向的绳拉力约束项和科氏力项,模拟飞行器模型在滚转和偏航方向无约束情况下的强迫俯仰 自由滚转/偏航角运动。
[0022]
在步骤5)中,所述舵面控制律2的表达式如下:
[0023][0024]
其中,()
d
为期望值,k为控制增益,ψ为偏航角,r为偏航角速度,φ为滚转角,p为滚转角速度;此时俯仰方向上仍采用步骤3)所述大迎角强迫俯仰运动控制律,分析舵偏角对飞行器模型的气动力和气动力矩产生的影响和抑制,设计一种基于舵面控制的抑制滚转/偏航方向的角运动的控制方法;进一步的,飞行器在大迎角的姿态下飞行,将产生非对称的气流,从而产生横航向力矩,这也可用上述舵面控制律补偿,抑制滚转/偏航方向的角运动。
[0025]
与现有技术相比,本发明的有益效果在于:
[0026]
本发明提供的绳系支撑飞行器模型强迫自由角运动的模拟与抑制方法,能够在模拟飞行器在俯仰方向上进行大迎角强迫角运动的同时,释放滚转和偏航方向的自由度,也能抑制滚转和偏航方向的角运动。采用本发明可以对飞行器模型进行风洞大迎角强迫自由角运动试验,研究其大迎角下的气动/运动/控制耦合关系。
附图说明
[0027]
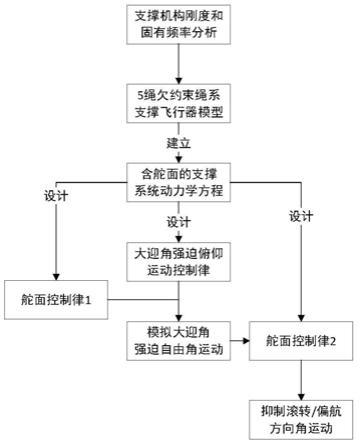
图1为本发明实施例总体流程图;
[0028]
图2为本发明实施例绳系支撑系统示意图;
[0029]
图3为本发明实施例大迎角强迫俯仰运动控制流程图;
[0030]
图4为本发明实施例有干扰时的大迎角强迫俯仰运动仿真俯仰角跟踪曲线图;
[0031]
图5为本发明实施例有干扰时的大迎角强迫俯仰运动仿真滚转和偏航方向自由运动图;
[0032]
图6为本发明实施例无干扰时的大迎角强迫俯仰运动仿真滚转和偏航方向自由运动图。
具体实施方式
[0033]
以下实施例将结合附图对本发明作进一步的说明,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0034]
图1为本发明实施例总体流程图。如图1所示,一种绳系支撑飞行器模型大迎角强迫自由角运动的模拟与抑制方法,包括:
[0035]
1)采用一种5绳欠约束绳系支撑飞行器模型的方式;
[0036]
2)建立含舵面的支撑系统动力学方程;
[0037]
3)设计大迎角强迫俯仰运动控制律;
[0038]
4)设计舵面控制律1,补偿滚转和偏航方向的绳拉力约束项和科氏力项,模拟强迫俯仰 自由滚转/偏航角运动;
[0039]
5)设计舵面控制律2,抑制滚转/偏航方向的角运动。
[0040]
具体步骤如下:
[0041]
1)采用如图2所示的一种5绳欠约束绳系支撑系统支撑,支撑飞行器模型。oxyz为地面坐标系,px'y'z'为机体坐标系,5绳欠约束绳系支撑系统上方的4根绳索布置在飞行器模型的两侧前后,从b
i
点引出,连接在飞行器模型的p
i
点上;下方的1根绳索从o点引出,布置在通过飞行器模型质心p的位置;绳索均为张紧状态,不发生虚牵,即绳拉力t>0。
[0042]
2)建立如图1所示含舵面的支撑系统的动力学方程:
[0043][0044]
其中,m(x)为飞行器模型的惯性矩阵,x为飞行器模型位姿矢量,为速度项,为加速度项;为非线性哥氏离心力矩阵,w
g
为重力矢量,为与飞行器模型的位姿及其变化率有关的气动力/力矩向量,w
e2
(δ
r
,δ
a
)为与飞行器模型的方向舵偏转角和副翼偏转角有关的气动力/力矩向量,δ
r
为飞行器模型的方向舵偏转角,δ
a
为飞行器模型的副翼偏转角,为方向舵偏航力矩系数,为副翼滚转力矩系数,t为绳拉力矢量,j为系统的雅可比矩阵;表示一阶导数,表示二阶导数,()
t
表示矩阵的转置。
[0045]
3)在设置舵偏角为零的条件下设计如图3所示的大迎角强迫俯仰运动控制律。图3中的小波神经网络用于补偿系统内部建模的不确定性,扩张状态观测器用于补偿实际试验中存在的外界干扰,非奇异终端滑模控制器用于使被控对象的跟踪误差收敛。
[0046]
其中,俯仰强迫运动总控制律为:
[0047][0048]
其中,t为绳拉力,c为等效雅可比矩阵,a0为等效惯性矩阵,b0为等效阻尼矩阵,d0为等效科氏力与重力矩阵,为干扰项估计值,为最大神经网络估计权值;为非奇异终端滑模面函数,β>0,1<γ<2,e=x
‑
x
d
为误差,x为实际位姿,x
d
为理论位姿,||表示绝对值,sign()表示符号函数;w为小波基函数矩阵;d1、d2为半正定增益矩阵,仅在俯仰方向设置增益值;u0是控制律中的鲁棒项;()
表示矩阵的伪逆;表示矩阵相乘,运算如下:其中,w
i
是矩阵w的第i个列向量。
[0049]
以控制飞行器模型做大迎角强迫俯仰角运动的同时,在滚转方向上施加一个小扰动,但不在此方向上作控制的情况为例。其中仿真轨迹设置为:扰动大小
设置为:[0;0;0;0.1*cos(t);0;0]。图4为本发明实施例有干扰时的大迎角强迫俯仰运动仿真俯仰角跟踪曲线图,其结果表明:飞行器模型在受迫的俯仰方向上,保持较高的跟踪精度;图5为本发明实施例有干扰时的大迎角强迫俯仰运动仿真滚转和偏航方向自由运动图,图6为本发明实施例无干扰时的大迎角强迫俯仰运动仿真滚转和偏航方向自由运动图,对比其结果,可知:绳系支撑在滚转和偏航方向上约束较小,具备模拟自由角运动的条件。
[0050]
4)设计舵面控制律1,补偿滚转和偏航方向的绳拉力约束项和科氏力项:
[0051][0052]
其中,()
i
代表列向量的第i个分量。该控制律可以补偿绳拉力和科氏力项,模拟飞行器模型在滚转和偏航方向无约束情况下的强迫俯仰 自由滚转/偏航角运动。
[0053]
5)设计舵面控制律2,抑制滚转/偏航方向的角运动:
[0054][0055]
其中,k为pd控制增益,ψ为偏航角,r为偏航角速度,φ为滚转角,p为滚转角速度,()
d
为期望值。此时俯仰方向上仍采用步骤3)所述大迎角强迫俯仰运动控制律。
[0056]
本发明中应用具体个例对本发明的原理及实施方式进行阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。