1.本发明属于视觉应用和非接触缺陷检测技术领域,具体涉及一种可燃药筒表面缺陷检测方法及系统。
背景技术:
2.可燃药筒广泛应用于火炮的制造工业,如主战坦克、大中口径自行火炮的发射装药容器等,药筒在提高火炮初速、保护火炮发射药以及减少炮膛损耗等方面都起到了重要作用,并且为火炮自动装填奠定了基础。目前,大部分火炮均采用药筒装填炮弹的发射药。这些可燃药筒在加工过程中往往会出现人为因素导致可燃药筒产生缺陷。
3.目前,我国的可燃药筒缺陷检测基本都是人工检测,检测精度和自动化程度低,难以满足现代高精度和高自动化的要求,且成本较高;对于部分厂家采用视觉检测,大部分是传统的缺陷检测方法,即通过拍摄各种缺陷图片总结缺陷的特征,从而通过图像算法对拍摄的图片进行图像处理,根据处理结束后特征的灰度、形状等信息来判断其是否存在缺陷及其种类,此方法受外界环境影响较大,耗费时间且检测精度低。
技术实现要素:
4.基于上述问题,针对现有技术存在的测量精度低、自动化程度低、成本较高等技术问题,本发明提出一种可燃药筒表面缺陷检测方法及系统,能够实现非接触式的检测,能够进行高效、高精度的可燃药筒表面缺陷检测。
5.为实现上述目的,本发明提出的一种可燃药筒表面缺陷检测方法,包括:
6.步骤1:采集图像并进行标注,采集不同缺陷的可燃药筒表面的图像,以及无缺陷的可燃药筒表面的图像,并对图像进行正常或不同缺陷的标注;
7.步骤2:构建样本集,所述样本集中的每个样本包括一张分割后的图像以及该图像对应的纹理特征参数向量;
8.步骤3:构建包含向量拼接的卷积神经网络,利用样本集对包含向量拼接的卷积神经网络进行训练、验证和测试;
9.步骤4:利用训练后的包含向量拼接的卷积神经网络对待检测图像进行缺陷预测,得到是否有缺陷以及具体的缺陷类型。
10.所述步骤2包括:
11.步骤2.1:将采集到的图像进行直方图均衡化处理,得到均衡化处理后的灰度图像;
12.步骤2.2:根据设置的像素值对灰度图像进行分割得到多个小样本图像;
13.步骤2.3:计算小样本图像的灰度共生矩阵,得到对比度a
i1
、角二阶矩a
i2
、熵a
i3
和逆差矩a
i4
四个特征参数,记为纹理特征参数向量a=(a
i1
,a
i2
,a
i3
,a
i4
)。
14.所述步骤3包括:
15.步骤3.1:在卷积神经网络中的卷积层与全连接层之间搭建向量拼接层,构建包含
拼接层的卷积神经网络;
16.步骤3.2:将样本集划分为训练集、验证集和测试集;
17.步骤3.3:利用训练集对包含向量拼接的卷积神经网络进行训练,当达到最大迭代次后停止训练得到训练后的卷积神经网络;
18.步骤3.4:利用验证集对训练后的卷积神经网络进行验证来对网络中的参数进行调整,利用测试集对训练后的卷积神经网络进行测试。
19.所述步骤3.1包括:
20.步骤3.1.1:搭建卷积神经网络中的卷积层,对样本中的图像进行卷积池化处理得到特征矩阵;
21.步骤3.1.2:将特征矩阵转换为1*16的向量b=(b
i1
,b
i2
,b
i3
,b
i4
,...,b
i13
,b
i14
,b
i15
,b
i16
),其中b
i1
,b
i2
,b
i3
,b
i4
,...,b
i13
,b
i14
,b
i15
,b
i16
表示16个特征参数;
22.步骤3.1.3:搭建向量拼接层,将向量a、向量b分别进行数据归一化处理,然后拼接成尺寸为1*20的向量c,向量c中每个参数c
ij
:
23.当j=1,2,3,4时,向量c中参数c
ij
表示为:
[0024][0025]
当j=5,6,7...,18,19,20时,向量c中参数c
ij
表示为:
[0026][0027]
步骤3.1.4:向量拼接层后依次搭建全连接层、softmax回归分类器,得到包含拼接层的卷积神经网络结构。
[0028]
一种实现所述可燃药筒表面缺陷检测方法的检测系统,包括光照模块、工业相机、工控机,显示屏,工业相机与工控机电连接,工控机与显示屏电连接;
[0029]
所述光照模块用于提供光源;
[0030]
所述工业相机用于采集可燃药筒表面的图像,并将图像传输给工控机;
[0031]
所述工控机用于根据接收到的图像判断可燃药筒表面是否有缺陷以及具体的缺陷类型;
[0032]
所述显示屏用于将判断结果进行显示。
[0033]
所述系统还包括操作台、旋转平台、支架,待检测的可燃药筒放置在旋转平台上,工业相机固定在操作台上,光照模块设置在工业相机的上下两侧,光照模块发射的光线与待检测可燃药的端部平面平行。
[0034]
本发明的有益效果是:
[0035]
本发明提出了一种可燃药筒表面缺陷检测方法及系统,所述方法对采集到的图像进行直方图均衡化处理增强对比度然后将其分割为若干个小样本,并计算每个小样本灰度共生矩阵的对比度、角二阶矩、熵和逆差矩的特征参数,对传统的卷积神经网络改进为双输入卷积神经网络,将其特征参数和对应图像同时输入到双输入卷积神经网络中进行训练判断是否含有缺陷以及缺陷的所属类别,所述陷检测系统能够实现可燃药筒表面缺陷的自动化检测,提高了自动化程度,并且检测一致性好、成本低、效率高,满足自动化批量生产的需求。
附图说明
[0036]
图1为本发明中可燃药筒表面缺陷检测方法流程图;
[0037]
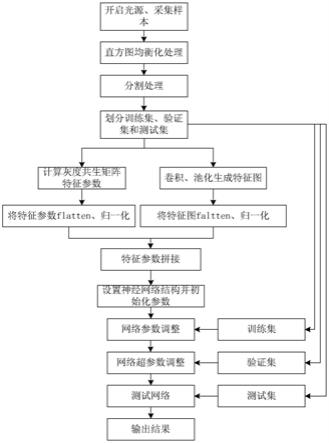
图2为本发明中可燃药筒表面缺陷检测方法原理图;
[0038]
图3为本发明中所述检测系统的结构示意图,其中,1、被测可燃药筒,2、镜头,3、工业相机,4、光照模块,5、工控机,6、操作台,7、旋转平台,8、支架;
[0039]
图4为本发明中采用所述检测系统检测到的白色斑迹缺陷样本;
[0040]
图5为本发明中采用所述检测系统检测到的油渍印痕缺陷样本;
[0041]
图6为本发明中构建的卷积神经网络在训练集和测试集上的正确率曲线图。
具体实施方式
[0042]
下面结合附图和具体实施实例对发明做进一步说明。
[0043]
如图1~2所示,一种可燃药筒表面缺陷检测方法,包括:
[0044]
步骤1:采集图像并进行标注,采集不同缺陷的可燃药筒表面的图像,以及无缺陷的可燃药筒表面的图像,并对图像进行正常或不同缺陷的标注,采集到的缺陷包括:表面含有白色斑迹、油渍印痕缺陷等;
[0045]
步骤2:构建样本集,所述样本集中的每个样本包括一张分割后的图像以及该图像对应的纹理特征参数向量;包括:
[0046]
步骤2.1:将采集到的图像进行直方图均衡化处理,得到均衡化处理后的灰度图像;
[0047]
步骤2.2:根据设置的像素值对灰度图像进行分割得到多个小样本图像,分割后的无缺陷、白色斑迹、油渍印迹小样本图像各2000张;
[0048]
步骤2.3:计算小样本图像的灰度共生矩阵,得到对比度a
i1
、角二阶矩a
i2
、熵a
i3
和逆差矩a
i4
四个特征参数,记为纹理特征参数向量a=(a
i1
,a
i2
,a
i3
,a
i4
),其中i=1,2,3,4,5...i,i表示采集小样本图像的总数;
[0049]
步骤3:构建包含向量拼接的卷积神经网络,利用样本集对包含向量拼接的卷积神经网络进行训练、验证和测试;包括:
[0050]
步骤3.1:在卷积神经网络中的卷积层与全连接层之间搭建向量拼接层,构建包含拼接层的卷积神经网络;包括:
[0051]
步骤3.1.1:搭建卷积神经网络中的卷积层,对样本中的图像进行卷积池化处理得到4*4的特征矩阵;
[0052]
步骤3.1.2:将特征矩阵转换为1*16的向量b=(b
i1
,b
i2
,b
i3
,b
i4
,...,b
i13
,b
i14
,b
i15
,b
i16
),其中b
i1
,b
i2
,b
i3
,b
i4
,...,b
i13
,b
i14
,b
i15
,b
i16
表示16个特征参数;
[0053]
步骤3.1.3:搭建向量拼接层,将向量a、向量b分别进行数据归一化处理,然后拼接成尺寸为1*20的向量c,向量c中每个参数c
ij
:
[0054]
当j=1,2,3,4时,向量c中参数c
ij
表示为:
[0055][0056]
当j=5,6,7
…
,18,19,20时,向量c中参数c
ij
表示为:
[0057][0058]
步骤3.1.4:向量拼接层后依次搭建全连接层、softmax回归分类器,得到包含拼接层的卷积神经网络结构,图2中relu表示线性整流激活函数,softmax表示归一化指数函数,使得数据中的每一个元素的范围都在(0,1)之间,并且所有所述的和为1。
[0059]
步骤3.2:将样本集按照6:2:2的比例划分为训练集、验证集和测试集;
[0060]
步骤3.3:利用训练集对包含向量拼接的卷积神经网络进行训练,当达到最大迭代次后停止训练得到训练后的卷积神经网络;
[0061]
步骤3.4:利用验证集对训练后的卷积神经网络进行验证来对网络中的参数进行调整,利用测试集对训练后的卷积神经网络进行测试;
[0062]
步骤4:利用训练后的包含向量拼接的卷积神经网络对待检测图像进行缺陷预测,得到是否有缺陷以及具体的缺陷类型。
[0063]
一种实现所述的可燃药筒表面缺陷检测方法的检测系统,包括镜头2、光照模块4、工业相机3、工控机5,显示屏,工业相机3与工控机5电连接,工控机5与显示屏电连接;
[0064]
所述光照模块用于提供光源;
[0065]
所述工业相机用于采集可燃药筒表面的图像,并将图像传输给工控机;
[0066]
所述工控机用于根据接收到的图像判断可燃药筒表面是否有缺陷以及具体的缺陷类型;
[0067]
所述显示屏用于将判断结果进行显示。
[0068]
所述系统还包括操作台6、旋转平台7、支架8,待检测的可燃药筒1放置在旋转平台7上,工业相机3固定在操作台6上,光照模块4设置在工业相机3的上下两侧,光照模块4照射待测的可燃药筒1,发射的光线与待检测的可燃药筒1的端部平面平行,工业相机3采集可燃药筒1表面图像,工业相机3的输出端连接工控机5的输入端,通过以太网将图像以电信号的形式传输给工控机5,工控机5对工业相机3采集到的图像依次进行直方图均衡化预处理后将其分成若干个小样本,分别计算其灰度共生矩阵得到对比度、角二阶矩、熵和逆差矩的特征参数,将其特征参数和对应图像同时输入到包含拼接层的卷积神经网络中判断可燃药筒1表面是否含有缺陷。
[0069]
采集待检测可燃药筒表面图像时,1)将待检测的可燃药筒1放置在旋转平台7上,打开光照模块4为工业相机3提供光源;2)工业相机3采集待检测可燃药筒1的表面图像,并通过以太网传给工控机5;3)通过旋转平台6带动被测可燃药筒1旋转120
‑
130
°
,重复上述步骤2),依次将被测可燃药筒1旋转一周,对整个圆周的表面图像进行采集;
[0070]
如图3所示,待检测的可燃药筒1放置在旋转平台7上,光照模块4设置在工业相机3的上下两侧并固定在操作台6上,光照模块4发射的光线与被测可燃药筒3的端部平面平行,工业相机3固定在操作台6上,镜头2与工业相机1的输入端连接,工业相机3的输出端与工控机5连接,工控机5上连接有显示屏,操作台6通过支架8固定,为了清晰的拍摄到被测可燃药筒1表面的图像,可对光照模块3进行手动调试,光照模块3具体采用led灯,led灯所发出的光信号照射在被测的可燃药筒1表面上,镜头2的型号为computar m2514
‑
mp2,工业相机3型号为mer
‑
500
‑
14gm
‑
p,固定在操作台6上,镜头接收被测可燃药筒1表面上传来的光信号,工业相机3将采集的光信号通过以太网将图像以电信号的形式传输给工控机5进行分析处理,
工控机5连接有显示屏用于实时显示检测结果,工控机5型号为mv
‑
vb2100
‑
032,操作者能够在现场查看图像信息,并显示处理结果。工控机5对被测可燃药筒1表面图像的分割和神经网络的训练是通过pycharm 2019软件实现的,基于tensorflow2.0框架采用python编程搭建卷积神经网络结构对经过分割处理得到的小样本和经过计算得到的灰度共生矩阵参数进行预测分析,输出是否含有缺陷和缺陷的类别。
[0071]
可燃药筒的实际尺寸为的直径为300mm,工业相机3采集一次图片后,将旋转平台7带动被测可燃药筒旋转120
‑
130
°
,工业相机再次采集图像,总计旋转两次即可旋转一周,共采集三张图像,工业相机3采集到的图像像素大小为256像素*256像素,通过以太网将图像以电信号的形式传输给工控机5,通过工控机内置的pycharm 2019软件将三张图片依此进行直方图均衡化处理然后将其分割成大小为16像素*16像素的图片共计768张,通过pycharm 2019软件分别计算每张图片的灰度共生矩阵的对比度、角二阶矩、熵和逆差矩这4个特征参数(a
i1
,a
i2
,a
i3
,a
i4
),其中i=1,2,3,4,5
…
i,并将图片分别进行卷积池化得到另一组参数(b
i1
,b
i2
,b
i3
,b
i4
,
…
,b
i13
,b
i14
,b
i15
,b
i16
),数量为16个,其中i=1,2,3,4,5
…
i,将两组向量分别进行数据归一化后拼接成尺寸为1*20的特征向量(c
i1
,c
i2
,c
i3
,c
i4
,
…
,c
i17
,c
i18
,c
i19
,c
i20
),输入到训练好的全连接层中,其中训练集和测试集上的正确率曲线如图6所示,并将数据进行实时显示,最后在显示屏上显示检测结果,如图4~5所示,在输出结果中有742个为无缺陷,20个为白色斑迹,6个为油渍印痕,故判断被测可燃药筒有白色斑迹和油渍印痕缺陷。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。