技术特征:
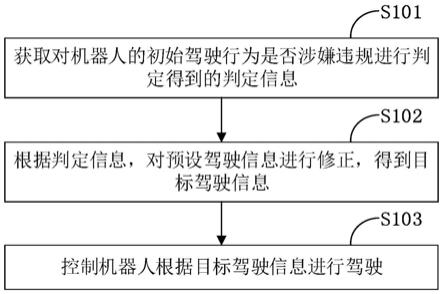
1.一种机器人的驾驶行为控制方法,其特征在于,包括:获取对机器人的初始驾驶行为是否涉嫌违规进行判定得到的判定信息,所述初始驾驶行为是指所述机器人根据预设驾驶信息进行驾驶的行为;根据所述判定信息,对所述预设驾驶信息进行修正,得到目标驾驶信息;控制所述机器人根据所述目标驾驶信息进行驾驶。2.如权利要求1所述的机器人的驾驶行为控制方法,其特征在于,所述判定信息中携带有所述机器人的初始驾驶行为涉嫌的违规项目信息;在所述获取对机器人的初始驾驶行为是否涉嫌违规进行判定得到的判定信息之后,包括:确定所述违规项目信息对应的违规成因信息,所述违规成因信息为导致所述机器人采用与所述违规项目信息关联的初始驾驶行为的成因的信息;获取参考成因信息;确定所述违规成因信息是否属于所述参考成因信息;若所述违规成因信息属于所述参考成因信息,则向交通管理中心的管理设备上报所述违规成因信息。3.如权利要求2所述的机器人的驾驶行为控制方法,其特征在于,在所述确定所述违规成因信息是否属于所述参考成因信息之后,包括:若所述违规成因信息不属于所述参考成因信息,则根据所述判定信息,对所述预设驾驶信息进行修正,得到并存储所述目标驾驶信息。4.如权利要求1至3任意一项所述的机器人的驾驶行为控制方法,其特征在于,所述根据所述判定信息,对所述预设驾驶信息进行修正,得到目标驾驶信息,包括:根据所述判定信息中携带的违规项目信息,对所述预设驾驶信息进行修正,得到所述目标驾驶信息。5.如权利要求4所述的机器人的驾驶行为控制方法,其特征在于,所述根据所述判定信息中携带的违规项目信息,对所述预设驾驶信息进行修正,得到所述目标驾驶信息,包括:若所述判定信息中携带的违规项目信息包含与驾驶路径关联的第一违规项目信息,则获取所述机器人当前所在位置的障碍物信息;根据所述障碍物信息和所述第一违规项目信息确定目标驾驶路径,所述目标驾驶路径用于对所述预设驾驶信息中的预设驾驶路径进行修正。6.如权利要求4所述的机器人的驾驶行为控制方法,其特征在于,所述根据所述判定信息中携带的违规项目信息,对所述预设驾驶信息进行修正,得到所述目标驾驶信息,包括:若所述判定信息中携带的违法违规项目包含与驾驶参数关联的第二违规项目信息,则确定与所述第二违规项目信息关联的目标驾驶参数,所述目标驾驶参数用于对所述预设驾驶信息中的预设驾驶参数进行修正。7.如权利要求1至3任意一项所述的机器人的驾驶行为控制方法,其特征在于,所述获取对机器人的初始驾驶行为是否涉嫌违规进行判定得到的判定信息,包括:接收由交通管理中心的管理设备发送的连接请求,所述连接请求为基于所述机器人的标识码发送的连接请求;根据所述连接请求,与所述管理设备建立通信连接;
接收由所述管理设备基于所述通信连接发送的所述判定信息。8.一种机器人的驾驶行为控制装置,其特征在于,包括:获取单元,用于获取对机器人的初始驾驶行为是否涉嫌违规进行判定得到的判定信息,所述初始驾驶行为是指所述机器人根据预设驾驶信息进行驾驶的行为;修正单元,用于根据所述判定信息,对所述预设驾驶信息进行修正,得到目标驾驶信息;控制单元,用于控制所述机器人根据所述目标驾驶信息进行驾驶。9.一种终端,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至7任一项所述方法的步骤。10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述方法的步骤。
技术总结
本申请适用于机器人控制领域,提供了一种机器人的驾驶行为控制方法、装置、终端和存储介质。其中,上述机器人的驾驶行为控制方法包括:获取对机器人的初始驾驶行为是否涉嫌违规进行判定得到的判定信息,所述初始驾驶行为是指所述机器人根据预设驾驶信息进行驾驶的行为;根据所述判定信息,对所述预设驾驶信息进行修正,得到目标驾驶信息;控制所述机器人根据所述目标驾驶信息进行驾驶。本申请的实施例能够提高交通安全性。能够提高交通安全性。能够提高交通安全性。
技术研发人员:夏舸 邓有志
受保护的技术使用者:深圳优地科技有限公司
技术研发日:2021.07.06
技术公布日:2021/11/4
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。