1.本发明属于零件缺陷检测领域,尤其是涉及一种发动机热交换器接口的三维视觉检测方法。
背景技术:
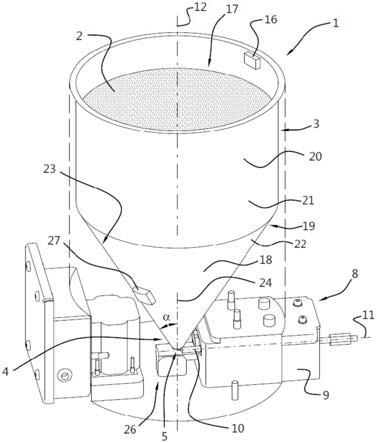
2.在热交换器的生产过程中,受各种条件限制,产出的热交换器存在一定的缺陷,如热交换器输入管的中轴线与标准中轴线存在角度偏差、热交换器输入管表面形变、热交换器输入管尺寸错误等问题,这些缺陷严重影响产品的表面质量和物理机械性能,最终也可能导致整个零件不合格。
3.目前工厂的质量检测环节多采用人工检测或是离线抽样检测,主观的检测法是借助游标卡尺等辅助工具对热交换器成品或半成品进行人为的测量,该方法虽然灵活,但对工人的工作能力、疲劳程度有较强的依赖性,存在效率低、精度低、稳定性差等缺点,且人工检测的人力成本在生产成本中占有相当大的比例,给企业的成本控制带来了很大的难度;而离线抽样检测,虽能获得较高精度的检测数据,但是离线抽样检测存在反应慢、效率低、抽样覆盖面小等缺点,很难及时发现热交换器的缺陷。
技术实现要素:
4.本发明所要解决的技术问题是提供一种检测过程高效、灵活且检测结果准确的发动机热交换器接口的三维视觉检测方法。
5.本发明解决上述技术问题所采用的技术方案为:一种发动机热交换器接口的三维视觉检测方法,包括以下步骤:
6.步骤1):通过标定板标定相机内参数和外参数,得到标定后的相机;
7.步骤2):通过标定后的相机获取标准热交换器的预设的多个采集角度且视距相等的图像,将每个采集角度的图像中标准热交换器的输入管对应的图像分割出来作为该采集角度对应的标准图像,对标准图像进行图像二值化处理得到图像二值化处理后的标准图像,提取图像二值化处理后的标准图像的图像特征参数作为标准特征参数;
8.步骤3):通过标定后的相机获取待比对热交换器的预设的多个采集角度的图像,将每个采集角度的图像中待比对热交换器的输入管对应的图像分割出来作为待比对图像,对待比对图像进行图像二值化处理得到图像二值化处理后的待比对图像,提取图像二值化处理后的待比对图像的图像特征参数作为待比对特征参数;
9.步骤4):将待比对特征参数与标准特征参数进行比较,判断待比对热交换器与比较结果相应的缺陷状况,完成检测过程。
10.所述的步骤2)中对标准图像进行图像二值化处理的具体过程为:对标准图像进行高斯滤波,然后通过otsu算法转化为标准二值图像,最后对标准二值图像进行闭运算,得到图像二值化处理后的标准图像;
11.所述的步骤3)中对待比对图像进行图像二值化处理的具体过程为:对待比对图像
进行高斯滤波,然后通过otsu算法转化为待比对二值图像,最后对待比对二值图像进行闭运算,得到图像二值化处理后的待比对图像;
12.所述的步骤2)中,标准特征参数包括图像二值化处理后的标准图像的顶点坐标、图像二值化处理后的标准图像所占的像素数量和图像二值化处理后的标准图像以指定误差扩展后所占的像素数量;
13.所述的步骤3)中,待比对特征参数包括图像二值化处理后的待比对图像的顶点坐标、图像二值化处理后的待比对图像所占的像素数量和图像二值化处理后的待比对图像以指定误差扩展后所占的像素数量。
14.所述的步骤2)中,对图像二值化处理后的标准图像的顶点坐标的提取过程如下:
15.(一)利用canny算子抑制噪声引起的伪边缘,检测出图像二值化处理后的标准图像的像素级边缘,获得细化的标准边缘轮廓图像;
16.(二)采用hough变换在细化的标准边缘轮廓图像中提取零件两侧直线,根据零件两侧直线获取该零件的中轴线;
17.(三)根据标准中轴线的斜率获取旋转矩阵,通过旋转矩阵旋转细化的标准边缘轮廓图像获取零件的中轴线水平后的水平图像,提取水平图像中标准热交换器的输入管的顶点对应的坐标并作为图像二值化处理后的标准图像的顶点坐标;
18.对图像二值化处理后的标准图像所占的像素数量的提取方式为:在细化的标准边缘轮廓图像的内部用白色像素进行填充,获取白色像素的像素数量并作为标准热交换器的输入管对应的图像所占的像素数量;
19.对图像二值化处理后的标准图像以指定误差扩展后所占的像素数量的提取过程如下:
20.(一)设置指定误差范围,根据指定误差范围对细化的标准边缘轮廓图像的边缘扩展生成标准扩展图像;
21.(二)在标准扩展图像的内部用白色像素填充生成掩膜mask图像,获取该掩膜mask图像内白色像素的像素数量,并作为图像二值化处理后的标准图像以指定误差扩展后所占的像素数量。
22.所述的步骤3)中,待比对热交换器的输入管对应的图像的顶点坐标的提取过程如下:
23.(一)利用canny算子抑制噪声引起的伪边缘,检测出图像二值化处理后的待比对图像的像素级边缘,获得细化的待比对边缘轮廓图像;
24.(二)采用hough变换在细化的待比对边缘轮廓图像中提取零件两侧直线,根据零件两侧直线获取该零件的中轴线;
25.(三)根据待比对中轴线的斜率获取旋转矩阵,通过旋转矩阵旋转细化的待比对边缘轮廓图像获取零件的中轴线水平后的水平图像,提取水平图像中待比对热交换器的输入管的顶点对应的坐标并作为图像二值化处理后的待比对图像的顶点坐标;
26.对图像二值化处理后的待比对图像所占的像素数量的提取方式为:在细化的待比对边缘轮廓图像的内部用白色像素进行填充,获取白色像素的像素数量并作为待比对热交换器的输入管对应的图像所占的像素数量;
27.对图像二值化处理后的待比对图像以指定误差扩展后所占的像素数量的提取过
程如下:
28.(一)设置指定误差范围,根据指定误差范围对细化的待比对边缘轮廓图像的边缘扩展生成待比对扩展图像;
29.(二)在待比对扩展图像的内部用白色像素填充生成掩膜mask图像,获取该掩膜mask图像内白色像素的像素数量,并作为图像二值化处理后的待比对图像以指定误差扩展后所占的像素数量。
30.所述的步骤4)的具体过程如下:
31.4)
‑
1将图像二值化处理后的标准图像的顶点坐标记为(x,y),将图像二值化处理后的待比对图像的顶点坐标记为(x
′
p
,y
′
p
),令s=|(x
′
p
‑
x)2 (y
′
p
‑
y)2|,其中,|...|为取绝对值符号,设置尺寸允许误差限并记为δ
p
,当s≤δ
p
,则判定待比对热交换器的输入管为尺寸合格件,若s>δ
p
,则判定待比对热交换器的输入管为尺寸不合格件;
32.4)
‑
2将图像二值化处理后的标准图像所占的像素数量记为m,将图像二值化处理后的待比对图像所占的像素数量记为m
p
,设置表面缺陷允许误差限并记为δ
m
,当|m
p
‑
m|≥δ
m
时判定待比对热交换器的输入管的表面缺陷符合规范,若|m
p
‑
m|<δ
m
,则判定待比对热交换器的输入管的表面缺陷不符合规范,其中,|...|为取绝对值符号;
33.4)
‑
3将图像二值化处理后的标准图像以指定误差扩展后所占的像素数量记为c,将图像二值化处理后的待比对图像以指定误差扩展后所占的像素数量记为c
p
,设置角度允许误差限并记为δ
c
,当|c
p
‑
c|≥δ
c
时判定待比对热交换器的输入管的角度符合规范,当|c
p
‑
c|<δ
c
,则判定待比对热交换器的输入管的角度不符合规范,其中,|...|为取绝对值符号。
34.与现有技术相比,本发明的优点在于通过标定后的相机从预设的多个采集角度且视距相等的位置拍摄标准热交换器零件的图像,并进行二值化处理,对二值化处理后图像检测边缘分割前景背景,通过计算误差扩展后边缘作为特征参数,对待比对零件进行重复操作,与标准零件的特征参数进行比较,从而筛选出各种缺陷的零件;比起传统的人工检测,本发明所采用的检测方法可以快速高效地对所有零件进行逐一检测,而且分类效果良好,可以极大地提高生产效率,同时显著提高出厂零件的合格率。
具体实施方式
35.以下对本发明作进一步详细描述。
36.一种发动机热交换器接口的三维视觉检测方法,包括以下步骤:
37.步骤1):通过标定板标定相机内参数和外参数,得到标定后的相机。
38.步骤2):通过标定后的相机获取标准热交换器的预设的多个采集角度且视距相等的图像,将每个采集角度的图像中标准热交换器的输入管对应的图像分割出来作为该采集角度对应的标准图像,对标准图像进行图像二值化处理得到图像二值化处理后的标准图像,提取图像二值化处理后的标准图像的图像特征参数作为标准特征参数,标准特征参数包括图像二值化处理后的标准图像的顶点坐标、图像二值化处理后的标准图像所占的像素数量和图像二值化处理后的标准图像以指定误差扩展后所占的像素数量;以指定误差扩展在检测中一般根据中轴线扩展2.5mm,即扩展2.5/0.094=26.5个像素,结合具体方法公式计算进行边缘扩展,用于判定零件是否残缺;
39.对标准图像进行图像二值化处理的具体过程为:对标准图像进行高斯滤波,然后
通过otsu算法转化为标准二值图像,最后对标准二值图像进行闭运算,得到图像二值化处理后的标准图像;
40.对图像二值化处理后的标准图像的顶点坐标的提取过程如下:
41.(一)利用canny算子抑制噪声引起的伪边缘,检测出图像二值化处理后的标准图像的像素级边缘,获得细化的标准边缘轮廓图像;
42.(二)采用hough变换在细化的标准边缘轮廓图像中提取零件两侧直线,根据零件两侧直线获取该零件的中轴线;
43.(三)根据标准中轴线的斜率获取旋转矩阵,通过旋转矩阵旋转细化的标准边缘轮廓图像获取零件的中轴线水平后的水平图像,提取水平图像中标准热交换器的输入管的顶点对应的坐标并作为图像二值化处理后的标准图像的顶点坐标;以上过程中,获取中轴线、获取旋转矩阵、获取水平图像及获取顶点坐标均为由常规标准的数学公式推导得出;
44.对图像二值化处理后的标准图像所占的像素数量的提取方式为:在细化的标准边缘轮廓图像的内部用白色像素进行填充,获取白色像素的像素数量并作为标准热交换器的输入管对应的图像所占的像素数量;
45.对图像二值化处理后的标准图像以指定误差扩展后所占的像素数量的提取过程如下:
46.(一)设置指定误差范围,根据指定误差范围对细化的标准边缘轮廓图像的边缘扩展生成标准扩展图像;
47.(二)在标准扩展图像的内部用白色像素填充生成掩膜mask图像,获取该掩膜mask图像内白色像素的像素数量,并作为图像二值化处理后的标准图像以指定误差扩展后所占的像素数量。
48.步骤3):通过标定后的相机获取待比对热交换器的预设的多个采集角度的图像,将每个采集角度的图像中待比对热交换器的输入管对应的图像分割出来作为待比对图像,对待比对图像进行图像二值化处理得到图像二值化处理后的待比对图像,提取图像二值化处理后的待比对图像的图像特征参数作为待比对特征参数,待比对特征参数包括图像二值化处理后的待比对图像的顶点坐标、图像二值化处理后的待比对图像所占的像素数量和图像二值化处理后的待比对图像以指定误差扩展后所占的像素数量;
49.对待比对图像进行图像二值化处理的具体过程为:对待比对图像进行高斯滤波,然后通过otsu算法转化为待比对二值图像,最后对待比对二值图像进行闭运算,得到图像二值化处理后的待比对图像;
50.待比对热交换器的输入管对应的图像的顶点坐标的提取过程如下:
51.(一)利用canny算子抑制噪声引起的伪边缘,检测出图像二值化处理后的待比对图像的像素级边缘,获得细化的待比对边缘轮廓图像;
52.(二)采用hough变换在细化的待比对边缘轮廓图像中提取零件两侧直线,根据零件两侧直线获取该零件的中轴线;
53.(三)根据待比对中轴线的斜率获取旋转矩阵,通过旋转矩阵旋转细化的待比对边缘轮廓图像获取零件的中轴线水平后的水平图像,提取水平图像中待比对热交换器的输入管的顶点对应的坐标并作为图像二值化处理后的待比对图像的顶点坐标;
54.对图像二值化处理后的待比对图像所占的像素数量的提取方式为:在细化的待比
对边缘轮廓图像的内部用白色像素进行填充,获取白色像素的像素数量并作为待比对热交换器的输入管对应的图像所占的像素数量;
55.对图像二值化处理后的待比对图像以指定误差扩展后所占的像素数量的提取过程如下:
56.(一)设置指定误差范围,根据指定误差范围对细化的待比对边缘轮廓图像的边缘扩展生成待比对扩展图像;
57.(二)在待比对扩展图像的内部用白色像素填充生成掩膜mask图像,获取该掩膜mask图像内白色像素的像素数量,并作为图像二值化处理后的待比对图像以指定误差扩展后所占的像素数量。
58.实际检测时,通过四台ccd相机,分别位于0,90
°
,180
°
,270
°
定角度定视距拍摄分别得到需要的标准热交换器图像和待比对热交换器图像。
59.步骤4):将待比对特征参数与标准特征参数进行比较,判断待比对热交换器与比较结果相应的缺陷状况,完成检测过程,具体过程如下:
60.4)
‑
1将图像二值化处理后的标准图像的顶点坐标记为(x,y),将图像二值化处理后的待比对图像的顶点坐标记为(x
′
p
,y
′
p
),令s=|(x
′
p
‑
x)2 (y
′
p
‑
y)2|,其中,|...|为取绝对值符号,设置尺寸允许误差限并记为δ
p
,当s≤δ
p
,则判定待比对热交换器的输入管为尺寸合格件,若s>δ
p
,则判定待比对热交换器的输入管为尺寸不合格件;
61.4)
‑
2将图像二值化处理后的标准图像所占的像素数量记为m,将图像二值化处理后的待比对图像所占的像素数量记为m
p
,设置表面缺陷允许误差限并记为δ
m
,当|m
p
‑
m|≥δ
m
时判定待比对热交换器的输入管的表面缺陷符合规范,若|m
p
‑
m|<δ
m
,则判定待比对热交换器的输入管的表面缺陷不符合规范,其中,|...|为取绝对值符号;
62.4)
‑
3将图像二值化处理后的标准图像以指定误差扩展后所占的像素数量记为c,将图像二值化处理后的待比对图像以指定误差扩展后所占的像素数量记为c
p
,设置角度允许误差限并记为δ
c
,当|c
p
‑
c|≥δ
c
时判定待比对热交换器的输入管的角度符合规范,当|c
p
‑
c|<δ
c
,则判定待比对热交换器的输入管的角度不符合规范,其中,|...|为取绝对值符号。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。